Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
PLANNING
Anifuddin Azis
Artificial Intelligence
A Modern Approach
The subtitle of this book is "A Modern Approach." The intended meaning of
this rather empty phrase is that we have tried to synthesize what is now
known into a common framework, rather than trying to explain each
subfield of AI in its own historical context. We apologize to those whose
subfields are, as a result, less recognizable than they might otherwiise have
been.
The main unifying theme is the idea of an intelligent agent. We define AI as
the study of agents that receive percepts from the environment and perform
actions. Each such agent implements a function that maps percept sequences
to actions, and we cover different ways to represent these func- tions, such
as production systems, reactive agents, real-time cortditional planners,
neural networks, and decision-theoretic systems. We explain the role of
learning as extending the reach of
the designer into unknown
environments, and we show how that role constrains agent design,
favoring explicit knowledge representation and reasoning. We treat
robotics and vision not as independently defined problems, but as occurring
in the service of achieving goals. We stress the importance of the task
environment in determining the appropriate agent design.
Overview of the book
The book is divided into eight parts.
Part I, Artificial Intelligence, offers a view of the AI enterprise
based around the idea of intelligent agents-systems that can
decide what to do and then do it.
Part II Problem Solving, concentrates on methods for deciding
what to do when one needs to think ahead several steps-for
example in navigating across a country or playing chess.
Part III, Knowledge and Reasoning, discusses ways to
represent knowledge about the world-how it works, what
it is currently like, and what one's actions inight do-and
how to reason logically with that knowledge.
Part IV, Planning, then discusses how to use these reasoning methods to
decide what to do, particularly by constructing plans.
Part V, Uncertain Knowledge and Reasoning, is analogous to Parts III and
IV, but it concentrates on reasoning and decision making in the presence of
uncertainty about the world, as might be faced, for example, by a system
for medical diagnosis and treatment.
Together, Parts II-V describe that part of the intelligent agent responsible
for reaching decisions.
Part VI, Learning, describes methods for generating the knowledge
required by these decision-making components. Part VII, Communicating,
Perceiving, and Acting, describes ways in which an intelligent agent can
perceive its environment so as to know what is going on, whether by
vision, touch, hearing, or understanding language, and ways in which it can
turn its plans into real actions, either as robot motion or as natural
language utterances. Finally, Part VIII, Conclusions, analyzes the past and
future of AI and the philosophical and ethical implications of artificial
intelligence.
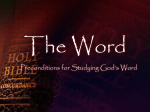
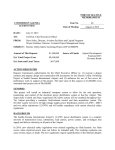
Areas of AI and their interdependencies
Search
Logic
Machine
Learning
NLP
Vision
Knowledge
Representation
Planning
Robotics
Expert
Systems
Introduction to Planning
The purpose of planning is to find a sequence of actions
that achieves a given goal when performed starting in a
given state
What is a plan? A sequence of operator instances,
such that "executing" them in the initial state will change
the world to a state satisfying the goal state description.
Goals are usually specified as a conjunction of goals to be
achieved
problem-solving agents are able to plan ahead - to
consider the consequences of sequences of actions - before
acting
knowledge-based agents can select actions based on
explicit, logical representations of the current state and the
effects of actions
Problem Solving Agents + Knowledge-based Agents
= Planning Agents
Algorithm of a simple planning agent:
1. Generate a goal to achieve
2. Construct a plan to achieve goal from current state
3. Execute plan until finished
4. Begin again with new goal
Planning
The task of coming up with a sequence of actions that
will achieve a goal is called planning.
We studied how to take actions in the world (search)
We studied how to represent objects, relations, etc.
(logic)
Now we will combine the two!
Planning Problem
Any problem that needs sequential decision
For a single decision, you should look for Machine
Learning
Classification
Given a picture “is this a cat or a dog?”
Any Examples?
FreeCell
Sokoban
Micro-mouse
Bridge Game
Football
Space Exploration
Autonomous planning, scheduling, control
NASA: JPL and Ames
Remote Agent
Experiment (RAX)
Deep Space 1
Mars Exploration
Rover (MER)
Manufacturing
Sheet-metal bending machines - Amada Corporation
Software to plan the sequence of bends
[Gupta and Bourne, J. Manufacturing Sci. and Engr., 1999]
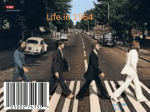
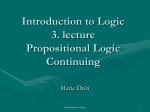
Games
Bridge Baron - Great Game Products
1997 world champion of computer bridge
[Smith, Nau, and Throop, AI Magazine, 1998]
2004: 2nd place
Us:East declarer, West dummy
Finesse(P1; S)
LeadLow(P1; S)
PlayCard(P1; S, R1)
Opponents:defenders, South & North
Contract:East – 3NT
On lead:West at trick 3 East:KJ74
West: A2
Out: QT98653
FinesseTwo(P ; S)
2
EasyFinesse(P2; S)
West— 2
StandardFinesse(P2; S)
…
…
(North— Q)
StandardFinesseTwo(P2; S)
PlayCard(P2; S, R2)
North— 3
BustedFinesse(P2; S)
(North— 3)
StandardFinesseThree(P3; S)
FinesseFour(P4; S)
PlayCard(P3; S, R3)
PlayCard(P4; S, R4)
PlayCard(P4; S, R4’)
East— J
South— 5
South— Q
Planning Languages
Languages must represent..
States
Goals
Actions
Languages must be
Expressive for ease of representation
Flexible for manipulation by algorithms
15
State Representation
A state is represented with a conjunction of positive
literals
Using
Logical Propositions: Poor Unknown
FOL literals: At(Plane1,OMA) At(Plan2,JFK)
FOL literals must be ground & function-free
Not allowed: At(x,y) or At(Father(Fred),Sydney)
Closed World Assumption
What is not stated are assumed false
16
Goal Representation
Goal is a partially specified state
A proposition satisfies a goal if it contains all the atoms of the
goal and possibly others..
Example: Rich Famous Miserable satisfies the goal Rich
Famous
17
Action Representation
Action Schema
Action name
Preconditions
Effects
At(WHI,LNK),Plane(WHI),
Airport(LNK), Airport(OHA)
Fly(WHI,LNK,OHA)
At(WHI,OHA), At(WHI,LNK)
Example
Action(Fly(p,from,to),
PRECOND: At(p,from) Plane(p) Airport(from) Airport(to)
EFFECT: At(p,from) At(p,to))
Sometimes, Effects are split into ADD list and DELETE list
18
Applying an Action
Find a substitution list for the variables
of all the precondition literals
with (a subset of) the literals in the current state description
Apply the substitution to the propositions in the effect list
Add the result to the current state description to generate the new
state
Example:
Current state: At(P1,JFK) At(P2,SFO) Plane(P1) Plane(P2) Airport(JFK)
Airport(SFO)
It satisfies the precondition with ={p/P1,from/JFK, to/SFO)
Thus the action Fly(P1,JFK,SFO) is applicable
The new current state is: At(P1,SFO) At(P2,SFO) Plane(P1) Plane(P2) Airport(JFK)
Airport(SFO)
19
Example: Air Cargo
See Figure 11.2
Initial state
Goal State
Actions: Load, Unload, Fly
20
Languages for Planning Problems
STRIPS
Stanford Research Institute Problem Solver
Historically important
ADL
Action Description Languages
See Table 11.1 for STRIPS versus ADL
PDDL
Planning Domain Definition Language
Revised & enhanced for the needs of the International Planning Competition
Currently version 3.1
21
Example: Spare Tire Problem
See Figure 11.3
Initial State
Goal State
Actions:
Remove(Spare,Trunk), Remove(Flat, Axle)
PutOn(Spare,Axle)
LeaveOvernight
Note
the negated precondition At(Flat,Axle) not allowed in STRIPS.
Could be easily replaced with Clear(Axle), adding one more predicate to the
language
22
Example: Blocks World
See Fig 11.4
Initial state
Goal
Actions:
Move(b,x,y)
MoveToTable(b,x)
23
Outline
Background
Situation Calculus
Frame, qualification, & ramification problems
Representation language
Planning Algorithms
State-Space Search
Partial-Order Planning (POP)
Planning Graphs (GRAPHPLAN)
SAT Planners
24
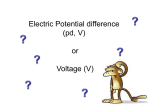
State-Space Search (1)
Search the space of states (first chapters)
Initial state, goal test, step cost, etc.
Actions are the transitions between state
Actions are invertible (why?)
Move forward from the initial state: Forward State-Space Search
or Progression Planning
Move backward from goal state: Backward State-Space Search
or Regression Planning
25
State-Space Search (2)
26
State-Space Search (3)
Remember that the language has no functions symbols
Thus number of states is finite
And we can use any complete search algorithm (e.g., A*)
We need an admissible heuristic
The solution is a path, a sequence of actions: total-order planning
Problem: Space and time complexity
STRIPS-style planning is PSPACE-complete unless actions have
only positive preconditions and
only one literal effect
27
SRIPS in State-Space Search
STRIPS representation makes it easy to focus on ‘relevant’
propositions and
Work backward from goal (using EFFECTS)
Work forward from initial state (using PRECONDITIONS)
Facilitating bidirectional search
28
Relevant Action
An action is relevant
In Progression planning when its preconditions match a subset
of the current state
In Regression planning, when its effects match a subset of the
current goal state
29
Consistent Action
The purpose of applying an action is to ‘achieves a
desired literal’
We should be careful that the action does not undo a
desired literal (as a side effect)
A consistent action is an action that does not undo a
desired literal
30
Backward State-Space Search
Given
A goal G description
An action A that is relevant and consistent
Generate a predecessor state where
Positive effects (literals) of A in G are deleted
Precondition literals of A are added unless they already appear
Substituting any variables in A’s effects to match literals in G
Substituting any variables in A’s preconditions to match substitutions in A’s
effects
Repeat until predecessor description matches initial state
31
Heuristic to Speed up Search
We can use A*, but we need an admissible heuristic
1.
2.
3.
4.
Divide-and-conquer: sub-goal independence assumption
Problem relaxation by removing
… all preconditions
… all preconditions and negative effects
… negative effects only: Empty-Delete-List
32
1. Subgoal Independence Assumption
The cost of solving a conjunction of subgoals is the sum of the
costs of solving each subgoal independently
Optimistic
Where subplans interact negatively
Example: one action in a subplan delete goal achieved by an action in another
subplan
Pessimistic (not admissible)
Redundant actions in subplans can be replaced by a single action in merged
plan
33
2. Problem Relaxation: Removing Preconditions
Remove preconditions from action descriptions
All actions are applicable
Every literal in the goal is achievable in one step
Number of steps to achieve the conjunction of literals in
the goal is equal to the number of unsatisfied literals
Alert
Some actions may achieve several literals
Some action may remove the effect of another action
34
3. Remove Preconditions & Negative Effects
Considers only positive interactions among actions to
achieve multiple subgoals
The minimum number of actions required is the sum of
the union of the actions’ positive effects that satisfy the
goal
The problem is reduced to a set cover problem, which is
NP-hard
Approximation by a greedy algorithm cannot guarantee an
admissible heuristic
35
4. Removing Negative Effects (Only)
Remove all negative effects of actions (no action may
destroy the effects of another)
Known as the Empty-Delete-List heuristic
Requires running a simple planning algorithm
Quick & effective
Usable in progression or regression planning
36
Discussion
1. The monkey-and-bananas problem is faced by a monkey in a
laboratory with some bananas hanging out of reach from the
ceiling. A box is available that will enable the monkey to reach the
bananas if he climbs on it. Initially, the monkey is at A, the bananas
at B, and the box at C. The monkey and box have height Low, but
if the monkey climbs onto the box he will have height High, the
same as the bananas. The actions available to the monkey include
Go from one place to another, Push an object from one place to
another, Climb Up onto or ClimbDown from an object, and
Grasp or Ungrasp an object. Grasping results in holding the object
if the monkey and object are in the same place at the same height.
a.Write down the initial state description.
b.Write down STRIPS-style definitions of the six actions.
2.You are given two jugs, a 4-litre one and a 3-litre one.
Neither has any measuring markers on it. There is a
pump that can be used to fill the jugs with water. How
can you get exactly 2 litres of water into 4-litre jug.”
Write a description of this problem in STRIPS notation.