Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
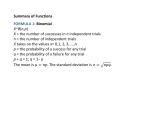
CCD Calibrations Eliminating noise and other sources of error 1. Noise in the data • • • • • • Raw data = scientific data + noise Noise : random noise, systematic noise Random noise : simple statistical relations(eg normal distribution) systematic noise : known sources or unknown sources Precision(정밀도) :how well measure the results (그림 a) Accuracy(정확도) : how close to true values (그림 b) • Systematic noise : 정밀도가 높아도 • 정확도가 높지 않음 • 통계처리가 어렵다. • CCD 의 바이아스(bias level), • 전처리 광(preflash), 오래된 검출기 온도변화에 의한 gain 변화, 관측시 얇은 구름 등 무작위 오차 : 통계적 오차, 정밀도 개선 : 실험 방법 개선, 정밀측정기술개발, 반복 실험, 등 Random error –statistical fluctuations = noise • x을 무한 번 측정할 경우 ==> 자료 분포 == 특정 x를 얻을 확률을 나타내는 분포 이를 모 분포(Parent distribution) <===> 샘플 분포(sample distribution) 실험과 관측에 의한 히스토그램(histogram) 과 이론적 가우스(Gaussian)곡선 • • • • 점선은 변수 x 측정에서 면적( area) / 커브의 전면적(total area) =확률 P(x) dx : x 가 x+-dx 내에 있을 확률 실험 또는 관측 분포와 모 분포 실험 또는 관측 분포와 모 분포cont 2. Probability Distribution : • • • • • • • • • • 1. Gaussian or normal Error Distribution : 많은 실험의 무작위 측정치들 2. Poisson Distribution ; 카운트 실험(counting experiments - data represent the number of items or events observed per interval) 3. binomial Distribution experiments in which the results is one of a small number of possible final states ( head and tail in a series of coin tosses, or the number of particles scattered forward or backward rel to the direction of the incident particles) • Poisson and Gaussian = limiting cases of the binomial distribution • 2. 1 Binomial Distribution Algebraic derivations of mean complete binomial probability mass functions are always unity the expected value of a discrete random variable to the binomial distribution , with m = n − 1 and s = k − 1 Algebraic derivations of variance , with m = n − 1 and s = k − 1 2. 2 Poisson Distribution Poisson distribution 유도 평균과 표준편차 확률 P(x, m) = mx e-m/x! Poisson distribution, probability 숙제 • 1. add three rows to previous table for values of the Poisson function for the expected means, m = 0.01, 0.1, and 0.3, each for x= 0, 1, 2, 3, 4. • 2. plot histograms(by hand or with computer) for these values and also those for m=1 on a single plot. Use an expanded scale; truncate the plot after x=4. Comment on the behavior of the four histograms. 2. 3. Gaussian or Normal Error Distribution 표준 가우스 분포 적분 확률 (interal probability) Normal Distribution Dark blue is less than one standard deviation from the mean. For the normal distribution, this accounts for about 68% of the set (dark blue), while two standard deviations from the mean (medium and dark blue) account for about 95%, and three standard deviations (light, medium, and dark blue) account for about 99.7%. Poisson & normal distributions 2. 4. Lorentzian 분포 관측기기 Statistical, and systemetic errors. Statistical fluctuation noise ; inherent randomness of certain types of events. Eg ; detect photons from a source : the actual number detected in a time interval will fluctuate from interval to interval Theoretically poisson distribution 예 CCD : cosmic ray, readout, dark noise, gain change due to T changes, the aging detector or electronic components 표준편차 +- 1s 2/3 의 측정치들 Types of CCD calibration data • Additive systematic noise (bais, dark, fringe in nearIR) • Multiplicative systematic noise (flat) • Fig ; a) counts and incident light intensity for two pixels on a CCD • B) additive correction to the data – zero counts for no light (bias, dark, fringe) • C) correct multiplicative noise(pixel to pixel QE variation and non-uniform illumination) a) counts and incident light intensity for two pixels on a CCD b) additive correction (bias, dark, fringe) to the data zero counts for no light c) Multicative correction(flat and nonuniform illumination)