Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
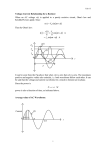
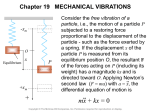
1 Vibration Isolation 208322 Mechanical Vibrations Lesson 7 We see from the figure that the motion transmitted from the supporting structure to the system is less than 1 when the ratio / n is greater than We present two schemes in vibration isolation. First is when the system is subjected to motion of its support, as was discussed in Lesson 6. The displacement transmissibility is given by 2. Therefore, n must be small compared to . This can be done by using soft spring whose k is small. 1/ 2 X k 2 (c ) 2 Y (k m 2 ) (c ) 2 Second is when a mass-spring-damper system produces a harmonic force F t F0 sin t. We are interested in the force transmissibility, a 1/ 2 1 (2 r ) 2 2 2 2 (1 r ) (2 r ) ratio between amplitude of the force transmitted by the machine to the supporting structure and amplitude of the disturbing force F t . The , force transmissibility is derived similarly to that of Lesson 6 and is given by where r / n , X is amplitude of system, and Y is amplitude of support. The plot of this amplitude ratio is given in Lesson 6 and is shown again below. 1/ 2 FT 1 (2 r ) 2 2 2 2 F0 (1 r ) (2 r ) . We can see that it has the same form as X / Y of the support motion case. Because X F0 / k 1/ 2 2 2 2 1 2 n n , to reduce X without changing the ratio FT / F0 , we need to increase k and mount the mass k / m M and hence m on a large mass M to keep the ratio / n constant. 2 Energy Dissipated by Damping Damping is present in all oscillatory systems. Its effect is to remove energy from the system, resulting in smaller oscillation. This section we want to look closely how damping removes energy from the system. Consider a damping force Fd cx acting on a system whose Figure 1: The plot of X / Y versus frequency ratio r / n . steady-state displacement and velocity are given by 1 Copyright 2007 by Withit Chatlatanagulchai 208322 Mechanical Vibrations Lesson 7 x X sin t , F dx cx dx cx dt c X cos t dt Wd x X cos t . Therefore, d 2 Fd cx 2 c X cos t c X 2 . Damping properties of materials are listed in many different ways. First is specific damping capacity, defined as the energy loss per cycle Wd c X x . 2 divided by the peak potential energy U : Rearranging terms, we have an equation of an ellipse 2 Wd . U 2 Fd x 1 c X X Second is loss coefficient, defined as the ratio of damping energy loss per radian Wd / 2 divided by the peak potential or strain energy U : whose graph is given in Figure 2. Fd kx Fd 2 0 c X 1 sin 2 t 2 2 / 2 Wd . 2 U ☻ Example 1: [1] Determine the expression for the power developed by a force F F0 sin t acting on a displacement x X 0 sin t. x x Figure 2: Energy dissipated by viscous damping. The energy loss per cycle due to the damping force is computed from the equation 2 Copyright 2007 by Withit Chatlatanagulchai 208322 Mechanical Vibrations Lesson 7 Solution Power is the rate of doing work, which is given by 3 Sharpness of Resonance Sharpness of resonance is the same as bandwidth already discussed in Lesson 6. dx dt X 0 F0 sin t cos t. PF 4 Vibration-Measuring Instruments The basic element of many vibration-measuring instruments is the seismic unit of Figure 3. ☻ Example 2: [1] A force F F0 sin t acts on a displacement of x X sin t . Determine the work done per cycle. Figure 3: A seismic unit. The seismic unit is mounted on the surface of the system whose vibration is to be determined. Suppose x t is absolute displacement of the seismic Solution We know that m and y t is absolute displacement of the system that vibrates with y t Y sin t. Our objective is to determine the unit mass W F x dt. Substituting F F0 sin t displacement, velocity, and acceleration of the system that the seismic unit is mounted on. We can achieve this by studying the relative motion z x y. We have done this in Lesson 6 where we studied relative motion of the support motion case. The relative motion is given by and x X sin t into the equation above gives the work done per cycle of W 2 / 0 F0 sin t X cos t dt z (t ) F0 X sin . 3 m 2Y sin(t 1 ) 2 1/ 2 (k m ) (c ) 2 2 Copyright Z sin(t 1 ) , 2007 by Withit Chatlatanagulchai 208322 Mechanical Vibrations Lesson 7 where Z m 2Y (k m 2 )2 (c )2 Y r2 (1 r 2 )2 (2 r ) 2 , c 2 r tan 1 . 2 2 k m 1 r The ratio Z / Y is shown in Figure 4, and plot of 1 is in Figure 5. 1 tan 1 Figure 5: Variation of with r. Next, we will discuss two main types of vibration pickup equipments. First, seismometer is an instrument with low natural frequency. From Figure 4, when / n is large, the relative displacement Z approaches Y regardless of the value of the damping . Second, accelerometer is an instrument with high natural frequency. When / n 0, we have Figure 4: Relative Motion plot. 1 (1 r ) (2 r ) 2 2 2 4 Copyright 1 2007 by Withit Chatlatanagulchai 208322 Mechanical Vibrations Lesson 7 y t sin t sin3t. and then Z 2Y acceleration . n2 n2 By measuring, we may have z t sin t 1 sin 3t 2 , The useful range of the accelerometer can be seen from Figure 6. Accelerators often have 0.7 to extend their useful ranges to 1 and 2 are phase shifts. The situation is shown in Figure 7 where the reproduced wave z t differs greatly from the original wave y t . where 0 / n 0.2. Figure 6: Acceleration error versus frequency. The relative motion z is usually converted to an electric voltage by making the seismic mass a magnet moving relative to coils fixed in the case. Because the voltage generated is proportional to the rate of cutting of the magnetic field, the output of the instrument will be proportional to the velocity of the vibrating body. Such instruments are called velometers. Phase distortion occurs in the reproduction of a complex wave. Suppose that the system vibrates with two frequencies Figure 7: Phase shifts. This can be avoided by either having all phase angles be zero or all harmonic components be shifted equally. From Figure 5, the first case 5 Copyright 2007 by Withit Chatlatanagulchai 208322 Mechanical Vibrations Lesson 7 0 for / n 1; the second case corresponds to 0.7 for / n 1. The second case can be expressed by the corresponds to equation Thus, for . 2 n 0 or 0.7, the phase distortion is practically eliminated. Lesson 7 Homework Problems None. Homework problems are from the required textbook (Mechanical Vibrations, by Singiresu S. Rao, Prentice Hall, 2004) References [1] Theory of Vibration with Applications, by William T. Thomson and Marie Dillon Dahleh, Prentice Hall, 1998 6 Copyright 2007 by Withit Chatlatanagulchai