Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Supporting Creative Mechanical Design
Kun Sun and Boi Faltings
Artificial Intelligence Laboratory (LIA)
Swiss Federal Institute of Technology (EPFL)
IN Ecublens, 1015 Lausanne, Switzerland
Fax: +41-21-693-5225
-
e-mail: sun©lia.di.epfi.ch
Abstract
Knowledge-based CAD systems limit designers’
creativity by constraining them to work with the
prototypes provided by the systems’ knowledge
bases. We investigate knowledge-based CAD systems capable of supporting creative designs in the
example domain of elementary mechanisms.
We present a technique based on qualitative explanations which allows a designer to extend
the knowledge base by demonstrating a structure which implements a function in a creative
way. Structure is defined as the geometry of the
parts, and function using a general logical language based on qualitative physics. We argue that
the technique can accommodate any creative design in the example domain, and we demonstrate
the technique using an example of a creative de-
sign.
The use of qualitative physics as a tool for extensible knowledge-based systems points out a new and
promising application area for qualitative physics.
Introduction
We consider those knowledge-based CAD systems
where designers can compose designs from a library of
prototypes ([Gero,90]) which the CAD system “knows”
how to instantiate and adapt during the design pro-
cess. Such systems limit designers’ creativity by constraining them to designs which can be constructed as
combinations of prototypes provided by the systems
knowledge base. Creative ideas often fall outside this
scope and thus cannot be accommodated in such a system.
We would like to propose that a design is creative
if cannot be composed exactly from the prototypes in
the system’s knowledge base. The CAD system supports creative design if it allows the designer to define
novel prototypes to cover his ideas. It is creative if
it discovers new prototypes by itself. New prototypes
are created by envisioning the prototypes of knowledge
base in a different environment.
The techniques we describe in this paper allow designers to extend a prototype base by providing:
• a model of the function that their creative ideas address, expressed in a general logical language based
on qualitative physics.
• a geometric model of a device that implements this
function.
The system envisions the qualitative behavior of the
device and identifies the behavior which implements
the function that the designer intends. This allows the
system to explain and generalize the idea, and define
a new prototype for it. The new prototype can then
be instantiated in any novel device the designer might
want to construct with it. Note that the example device given by the designer can be very different from
the device where the creative idea will be used. For example, a behavior observed in rocks could be reused in
the design of a mechanism. If the representation languages used for structure and function are sufficiently
general, our technique is guaranteed to cover any creative design which designers might propose.
Creativity is generally associated with extending
a space of design alternatives or variables ([Gero,92,
Sargent,92]). Such extensions are always possible only
if the space of possible prototypes is unbounded. This
is the case only if
(i) the set of possible functions is infinite,
(ii) the set of structures which can implement them is
infinite, and
(iii) there is no context-free mapping between primitives
of structure and function which would allow composition of any prototype from a small set of primitive
ones.
One such domain is designing geometric shapes
which implement kinematic functions. For kinematic
function, we define a generative qualitative representation language which allows an infinite set of different
expressions. We represent shapes by polygons, which
allow an infinite set of shapes. Kinematic functions are
generated by contacts between shapes, and there thus
exists a direct mapping between elementary functions
Y
However, not all ways of composing the two devices
actually lead to the composed function.
For exam-
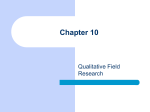
ple, the composition of Figure 1 (b) is legal, but in
Figure 1 (c) both contacts can not occur simultaneously and thus the device does not implement the desired function. This problem occurs whenever a contact can be subsumed by another. To satisfy the composed function, the device has to satisfy a compositional constraint (Figure 1(d)) which become apparent
only when the context of the device is known. But this
also means that the composition of several prototypes
defines a new and different prototype which was not
known before. Thus, in designs which involve geometry there is no direct mapping between functions and
structures, and such situations allow creative designs
even within fized representation languages for structure
and function.
d
C
Now assume that a designer has decided to implement the support function by combining the two prototypes, a design which the CAD system does not know
about. As the system’s knowledge is insufficient to
guarantee that the prototype composition will work as
expected the system does not know the difference
between cases (b) and (c) in Figure 1 the designer
himself must draw a correct solution. By qualitative
analysis of the device, our system then computes a
causal ezplanation of the way it implements the given
function. In particular, this explanation will show the
additional constraint which has to be satisfied in order to avoid the subsumption in Figure 1 (c). This
explanation is now used to automatically define a new
prototype which is added to the systems knowledge
base.
The system could be made creative by itself if it
were provided with a mechanism for exploring possible functions and geometric structures. However, such
a process must be guided by an evaluation of the interestingness of functions, known to be a very hard
problem in the learning community. When a desired
function is given, it is sometimes possible to use this
to guide the process of exploration ( [Faltings,92b]).
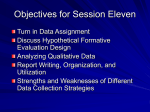
A more complex example of a kinematic pair is
a clock escapement, shown in Figure 2. Using
the theory of qualitative kinematics ( [Faltings,90,
Forbus et al.,9i]), the qualitative behavior and function of any kinematic pair can be computed. Furthermore, it is possible to invert the computation to determine the limits up to which it is valid ( [Faltings,92a})
and thus the explanation needed to define a new prototype. Our techniques concentrate on the conceptual
design stage where creativity takes place. Subsequent
detail design can further optimize the dimensions to
-
Figure 1: Composing prototypes into a novel device.
and structures. To satisfy requirement (iii), we must
show that this mapping is not context-free, i.e. that
the function of a particular structure is not independent of the context it is used in. Because of interactions through the geometry of the shapes, this is the
case. As an example, consider the design of a device
which prevents a block from dropping in the negative
Y-direction, a function which could be represented as:
• Device (A, B)
behavior: Y(A)
0
This function can be composed from two prototypes
implemented by single contacts, shown in Figure 1 (a)
and specified as follows:
• Device-i (A, B1)
behavior: Y(A)
• Device-2 (A, B2)
behavior: Y(A)
= E)
—~
X(B1)
=o
=
—*
X(B2)
=
ED
The classical abductive reasoning says that if we
know ~3and c~ j3, then the best explanation for /3 is
that & is true. It means that creative design can also
be considered as finding the best explanation for the
design goal.
We can expect the knowledge-based CAD system to
be capable of proposing a composition where B1
B2 B, based on the following abductive reasoning:
• Y(A) ~ 0 if Y(A)
0 implies a contradiction.
—÷
• X(B)
= 0 and X(B)
Gi is a contradiction.
-
accommodate non-qualitative specifications.
Our
work builds on the idea of prototypes ([Gero,90]), but is
also influenced by work on design systems using modelbased abductive reasoning (for example: [Williams,90],
[Neville and Weld, 92], [Sycara and Navinchandra,90]).
Pawl
Scape wheel
Pendulum
Figure 2: Am escapement design produced using our
systerrr. The wheel is driven clockwise, and the pawl
is attached to a pendulum which creates an oscillation
with constant period.
model
example
language~
environment
of use
F = (+1 —1)
tativ~~
vecto~
functional
feature
vocabulary
place
However, existing work on model-based design has
VX
place(x)
1y...
quantified
logical
expressions
~ç’~i~11..
behavior
predicates
been based on the use of context-independent pro-
totypes which do not consider the geometry of
their composition.
Design of kinematic chains
by composing kinematic pairs has been studied
in [Subramanian,93]. For certain classes of kinematic
pairs, Subramanian gives an algorithm to determine
their dimensions and arrangements in a chain under the assumption of uniform motion. Synthesis
of kinematic pairs with considerations of geometric
shapes has been studied by Joskowicz and Addanki
[Joskowicz and Addanki,88]), but they only treated
the trivial cases of convex objects where no subsumptions and thus no compositional constraints can occur.
We first discuss the representation formalisms underlying our technique: a language for representing
kinematic function based on qualitative physics, and
a formalism for representing shape features. We then
show how the analysis of a particular device can be
generalized to define the shape features which are responsible for the its function and thus define a new
prototype, and how this prototype can be used in design. Finally, we give an example of a a creative design in which creative ideas developed by observing a
ratchet mechanism are used to design a novel kind of
forward-reverse mechanism.
Prototypes for kinematic pair design
Prototypes for kinematic pair design consist of a qualitative function and a shape feature which implements
it. Both must be expressed in a well-defined repre-
sentation language so that they can be composed by
the CAD system. For creative design, these languages
must be generative and capable to express any possible
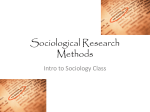
function or structure. In our system, we use a hierarchy of representation languages, as shown in Figure 3.
In this section, we present the languages we use for
configuration
space
contacts
metric
diagram
vertices
edges
dimensions
constraints
Figure 3: Representations used in our CAD system.
Polygonal shapes are represented by a metric diagram
consisting of vertices, edges and their dimensions. This
structure defines a configuration space of the device,
which shows the possible contacts between parts. Behavior predicates model qualitative features of the configuration space, and make up a place vocabulary
model of the space. Finally, functions are defined as
logical ezpressions involving the environment of u~
and the place vocabulary.
modeling qualitative function and shape features.
Metric diagram representation of shape
Shapes are represented using a metric diagram. The
metric diagram consists of a symbolic structure which
defines vertices, edges and metric parameters for the
positions of the vertices. In our current implementation, the metric diagram is restricted to polygons, but
can be extended to include circular arcs. A metric diagram represents several objects, each of which has a
well-defined degree of freedom.
Using the metric diagram, a shape feature (which
may involve several objects) is defined by:
• a set of vertices and edges,
• the metric parameters associated with them,
• a set of constraints which must hold simultaneously
for the shape feature to be present.
For example, the shape feature which corresponds
to the possibility of the top of the ratchets lever being
able to touch the wheel (Figure 3) can be expressed as
follows:
• must exist: vertices Vi, v2
• constraints: d— ru < r2
A language for modeling qualitative
kinematic function
For supporting creative design, it is crucial to be able
to model any function that a designer might consider.
In this section, we present a generative language capable of representing any kinematic function. Function
is a property of behavior caused by certain external influences on the device. For example, the function of a
ratchet is to block the motion of wheel in one direction
when the pawl is forced downwards and to not block
it in the other direction. We define a set of behavior
predicates and a formalism for expressing external influences on mechanisms. Functions are then defined
by logical expressions connecting external influences
and behavior predicates. The language is similar to
languages like CFRL ([Iwasaki et al., 93]), but allows
general logical expressions which are required to represent many mechanical functions.
tepresenting
qualitative
kinematic
behavior
fextbooks on the subject explain kinematic behavior
qualitatively by sequences of kinematic states. Examples of kinematic states of a ratchet device are shown
in Figure 4.
In qualitative physics terminology, a graph of kinematic states and transitions is called an envisionment.
It can be computed based on a place vocabulary, a
graph where each node represents a different combination of contact relationships, and each arc represents a potential transition between them. The en-
visionment is obtained by combining each node of the
place vocabulary with assumed motions and keeping
A
D
E
Figure 4: Ezamples of kinematic states and transitions
in a ratchet.
only the states and transitions consistent with external forces and motions. We have developed and implemented complete algorithms to compute place vocabularies for arbitrary two-dimensional higher kinematic
pairs in fixed-axis mechanisms. These have been used
to compute envisionments for a number of mechanisms,
such as a mechanical clock ([Forbus et al.,91]).
Behavior predicates We represent place vocabularies using a set of behavior predicates which characterize places, their features and their connectivity. For
a kinematic pair, the place vocabulary defines a graph
containing three types of kinematic states, corresponding to two, one and no contacts, and identified by the
following behavior predicates:
• point-place(x): the contacts in x hold only in a
single configuration.
• edge-place(x): the contacts in x hold in a onedimensional set of configurations.
• face-place(x): x is a place without any contacts and
two-degrees of freedom.
For each place, the place vocabulary defines the al-
lowed qualitative directions of motion:
• qualitative-motion(d): d is a qualitative vector
(d , d ) whose components indicate the direction of
0 1
motion of each object: d~E {—, 0, +}.
• allowed-motion(x,d): motion d is possible everywhere in place x.
For each link between states, the place vocabulary de-
fines the directions which can cause a transition:
• transition(x,y,d):
from place x to y.
motion d can cause a transition
Qualitative motions The kinematic states of a
mechanism are obtained by combining each place n
with its maximal set of possible qualitative motions:
Maii(n) = {m I allowed-motion(n,m)}.
In an actual behavior, only those motions M(z) which
in fact caused by an external influence actually occur.
The set of transitions between states is the set:
Tm
=
{ (n,y)
(3d E M(n)) transition(n,y,d)
More details on envisioning mechanisms using place
vocabularies can be found in [Nielsen,88].
Representing external influence In kinematic
pairs, external influences can be either forces, represented by a set ~
of qualitative vectors, or motions,
represented by a set Ma also consisting of qualitative
35
vectors. Since a qualitative force vector causes a qual-
itative motion in the direction of the same vector, the
set of possible motions M caused by external forces
1
is then given as:
=
{v
I
V
E ~Fass
}
The actual set of motions M(n) to be considered in
state n is then:
M(n) = Mass(n) fl Mj
Formulating functions
fl
Mal~(2~)
Functions are properties of
behavior under certain environment. In our system,
they are the assumed forces and motions. Therefore,
qualitative functions can be defined as logical conditions on place vocabularies without first constructing
the qualitative behavior. Using logical expressions on
the behavior predicates which represent the place vocabulary, a set of functions can be defined as required
for the application, and extended whenever required to
express a new specification. For example, some functions our current prototype system uses are:
• transmitting-place(z, dir1, dir2):
(Vd = (d1,d2)){d1 = dir1 ~ d2 = dir2}A{d2 =
—dir
2
=~d~.=
—diri}
• blocking-place(z):
-i(3d E M (z))allowed-motion(z, d)
(a place blocks motions if it does not allow any of
the assumed motions).
• partial-blocking-place(n, dirs):
-i(3d ~ dirs)allowed-motion(x, d)
(a partial blocking place blocks the specified motions)
• possible-path(no, na):
n)(3d~
M(z~))transition(n~,n~+i,d)
(There is a path from place no to place n~whenever
there is a sequence of places with transitions between
them under at least one assumed motion)
(xo=n~)V3S~(no,nu,n ,...,z~)(Vi<
2
• cycle(zo, C):
C
=
(zo,xi,n ,.
2
.
.,zn,no)
M(xt))transition(n~,
(Vn~ E
C)(3d
fi
nmod(i+1,n÷1), d)
(there is a cycle of states C such that transitions between subsequent states are consistent with assumed
and allowed directions of motion.)
A place vocabulary can only fulfill the required functions if the number of states and their connectedness is
sufficient. Reasoning about such topological features is
difficult in the place vocabulary itself, since it is based
only on individual boundaries of shapes which cannot
be modified individually. We use an explicit representation of the kinematic topology ([Faltings et al.,89]) of
the mechanism to detect cases where the topology of
particular object shapes would not permit the specified function. An example of a function defined on the
basis of kinematic topology is:
• cycle-topology(c,di,d ): if the first or second ob2
ject have rotational freedom, the cycle involves d
1
rotations of the first or d rotations of the second
2
object. This predicate is defined directly on the kinematic topology of the mechanism.
which can be defined formally using similar behavior
predicates as those which define place vocabularies.
The function of a ratchet can now be defined qualitatively as follows:
For all starting states a in which the orientation of the
lever is in the interval [0. .ir] (pointing to the left such
that the moment gravity exerts on it is positive):
• for Mass={(+, *)} A .‘Fass {(*, +)} (the “i” stands
for either +, 0 or -):
- cycle(a, C) A cycle..topology(c, 1, 0)
- —i(3z)blocking-place(n) A possible-path(a, n)
(assuming that the wheel turns counterclockwise and
the lever is forced onto it, there is a cycle of states
where the wheel can rotate, and no reachable blocking state from any starting state a.)
• for M(z)={(—, *)} A Fass—~ {(*, +)}:
- (Vy)possible-path(a, y) =~
{-icycle(y) A
(3z)(blocking-state(z) A possible~path(y, z))}
(assuming that the wheel turns clockwise, no reachable state leads to a cycle and all states can eventually lead to a blocking state).
Note that due to the ambiguities inherent in qualitative envisionments, the formalism always overgeneratc
behaviors. It is therefore only possible to define nec
essary, but never sufficient specifications of behavior
and, consequently, function. For example, we can express the specification that clockwise motion leads to
a blocking state only in an indirect manner: if there is
no possibility to cycle, and there is at least one reachable blocking state, the device must eventually reach
this state.
Creating and using new prototypes
Explaining functions New prototypes are defined
by generalizing a particular device which implements
Shape: Metric Diagram
These constraints, taken together, define a qualitative
shape feature which is associated to the functional feature. That is:
dvi
v4
behavior-predi A behavior-pred
2
dv2
hape Features
Metric Predicates:
e.g.,dv3+dv5>d
v3
Functional Features:
e.g., v3 can touch v5
A
...
constraints on shapes ~ shape feature
Reversing the causal chain of the analysis thus establishes a mapping from functional features to shape
features, and we call such a process causal inversion.
More details on the mapping between shape and qualitative behavior can be found in [Faltings,92a].
For any functional feature identified in the place vocabulary of a device, we can thus construct a corresponding shape feature which implements it. These
shape features, indexed by the functions, form new
prototypes which are added to the system’s knowledge
base.
Function:
Kinematic pair design with prototypes
Figure 5: Analysis of a device defines a place vocabulary as a set of features, for example the possibility
of touch between the tip of the lever and the bottom of
the wheels teeth. Such features define metric predicates
such as the one shown.
a novel function. The generalization is based on an
explanation of the function in terms of the structure of
the device.
A function is a quantified logical expression of behavior predicates defined on the place vocabulary. When
the function is implemented in a device, the envisionment defines a set of behavior predicates. Among
these predicates, there is at least one logical conjunction which satisfies the quantified condition defining
the function:
A kinematic pair is specified by a conjunction of qualitative functions. Structures which satisfy these functions are obtained by combining prototypes from the
systems knowledge base such that all required functions are covered. Combining prototypes means combining shape features using the following steps:
1. choose a unification of vertices and edges of the
shape features defined in the prototypes.
2. instantiate the cOnstraints associated with the shape
features and find a solution to the resulting constraint network.
3. envision the solution to determine compositional
constraints which must also be considered, add them
to the constraint network and iterate from step (2).
This process poses two major difficulties: satisfying
the dynamic constraint network, and discovering and
adding compositional constraints.
functional feature ~
A behavior-pred A
1
2
The essence of a creative idea is now formally defined
by the choice of a particular conjunction of behavior
predicates which satisfy the quantified logical expression defining the function. Note that in general, finding
all conjunctive propositions which satisfy a quantified
logical expression is a non-computable problem, thus
putting creativity is beyond the scope of algorithms.
behavior-pred
Defining shape features
Analyzing the behavior
of a device using a place vocabulary produces a set of
behavior predicates. Each of these predicates is computed based on certain properties of the geometry of
the device being analyzed (Figure 5). The analysis
which produced the behavior predicates can be generalized to constraints which the shape must satisfy in
order for the behavior predicates to remain present.
Constraint satisfaction The constraint network
for combining shape features is dynamic and involves
many nonlinear constraints. No reliable and efficient
method exists for solving such constraint networks. In
our current prototype, we use a process of iterative
refinement where an initial partial solution, given for
example by the device used to define the prototype, is
incrementally modified until all constraints are satisfied. The refinement process uses two types of modification operators:
• dimensional modifications, where the dimensions of
parts are adjusted to fit the functional requirements,
and
• topological modifications, where vertices are added
to part shapes. A topological modification is always
coupled with a dimensional modification to fix the
dimensions of the new features.
Figure 7: A forward-reverse mechanism as found in a
popular mechanism book.
Figure 6: Inferring a compositional constraint from observing the behavior of a combination of shape features.
Dimensional modification varies the values of dimensional parameters, thus changing the appearance of one
place and its properties (for example, inference rule).
Topological modification are proposed when there is no
dimensional modification which can satisfy additional
constraints. More details about the computation of dimensional and topological modifications can be found
in [Faltings and Sun,93].
Creative design of a forward-reverse
mechanism by composition
As an example of using composition for creative design,
we show how a novel forward-reverse mechanism can
be conceived by composing two ratchets.
A forward-reverse mechanism is used to transform
an oscillating motion into a rotation which advances
in one direction and, after a period of rest, reverses
the motion to a lesser degree. A solution for this problem in the literature ([Newell and Horton,67]) is shown
in Figure 7. It uses 4 parts and a friction-based mechanism which is problematic for maintenance.
Using the functional features defined earlier, the
function of a mechanism with forward-reverse movements can be specified as follows:
1. (~arrayX
=
{xo, x~,x~,. . ., x~~i}) of states such
that:
Discovering compositional constraints
As discussed in the introduction, combination of shape features often implies novel interactions which result in
additional compositional constraints. In kinematics,
the only interactions we have to consider are subsumptions, where one shape features makes the contact of
another impossible or alters the way it occurs. Compositional constraints which ensure the absence of subsumptions can be formulated most easily once a subsumption has been observed. For example, if we observe the subsumption shown in the introduction (Figure 1), we can infer a novel compositional constraint as
shown in Figure 6 by expressing the condition that the
subsuming contact may not occur simultaneously with
the subsumed contact as an algebraic inequality. Subsumption constraints are relatively simple expressions
in the case of translational motion, but can be considerably more complex in the case of kinematic pairs
involving rotations.
(Vx~
E
X)transmitting-p1ace(z~, (+, —))A
array-topology(X, 1,0)
(There is a array of states which transmits counterclockwise motion of input driver to clockwise motion
of wheel.)
2. (~arrayY = {Yo,Y1,y2,...,Yn—1}) of states such
that:
(Vy~ E
Y)transmitting-place(y~, (—, +))A
array-topology(y, 1,0)
(There is a array of states which transmits clockwise
motion of input driver to counterclockwise motion of
wheel.)
3. for .Ta (0, +), Mas.~{(,
+), (0, +), (-i-, +)}:
88
(Vx~E X)possible-path(x~, y~),yj e Y
(When the input driver changes the motion from
counterclockwise to clockwise, there exists a path
from place x~to y~)
4. for F.~ =(0, _),
3
Ma
{(,
38
_), (0, _), (+,
—)}:
3. when the lever changes the motion from counterclockwise to clockwise, there is a possible path from
one state of array X to one state of array 3) in the
same period, which fulfills specification (3).
(b)
(a)
(c)
one contact
two contacts
(d)
I
no contact
(e)
4. when the lever changes the motion from clockwise
to counterclockwise, there are no paths for satisfying
specification (4), since from one state of array 3), it
returns to one state of array X in the same period.
5. when the wheel is driven by the lever, clockwise and
counterclockwise motion angles of the wheel are always equal, which means that specification (5) cannot be satisfied.
The designer now searches functional features to satisfy specifications (4) and (5). For solving the discrepancy with specification (5), the designer has to add
a set of states where motion of the lever results in a
clockwise motion of the wheel:
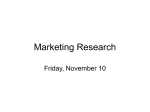
Figure 8: Creative design of forward-reverse mechanism by composing two ratchets, a), known device of
start design. a), b) and c), interesting aspects of functiomalfeatures discovered by envisionment. d), composition of shape features with subsumptions. e), iterative
satisfaction of subsumption constraints.
(Vy~
E
y)possible-path(y~, Xmod(j+1,n)), xmoa(i+1,n) E ~
(When the input driver changes the motion from
clockwise to counterclockwise, there exists a path
from place Yi to the place xmod(i+1,n) in the array
X.)
5. (Vx~E X)(Vy~E 3)) { disti(y~,Ymod(i+1,n), (+, *)) <
disti(z~, xmod(i41,n), (—, *)) }
(The counterclockwise motion angle of wheel in each
period is smaller than its clockwise motion angle.)
Discovering functional
envisionment
features
in the
Assume that the designer has noticed that a ratchet device, when used in the environment of forward-reverse
mechanism, can achieve some of the required functions.
In an envisionment of the ratchets behavior in the environment of the forward-reverse mechanism, the designer specifies the following correspondences to the
functional specifications:
1. there is one array of states, Figure 8 (a), in which
the lever can drive the wheel. The counterclockwise
motion of the lever turns the wheel clockwise. Therefore, it can be used to satisfy functional specification
(1).
2. there is another array of states, Figure 8 (b), in
which the lever can also drive the wheel. The clockwise motion of the lever pushes the wheel counterclockwise, which meets the requirement of specification (2).
(~arrayZ= {zo, Zi, Z , . . . ,
2
Vz~{transmitting-p1ace(z~,(+, *))}A
array-topology(Z, 1,0)
(States z transmits some motion of the lever to a
clockwise motion of the wheel.)
The envisionment of the ratchet in fact contains such
an array of states z, shown in Figure 8 (c). We assume
that the designer decides to use this set of states to
make it possible to satisfy specification (5). However,
(5) refers to the transitions defined in specification (4),
which are not yet satisfied in the simple ratchet device.
Assume that the designer decides to satisfy specifications (4) and (5) by creating paths passing through
intermediate states chosen from the array Z. He communicates this to the system by identifying in the envisionment of a ratchet the states z E Z and the transitions which should be connected to states in X and
3), thus defining the shape features and their relative
positions used in the design.
Defining a new prototype
The new prototype consists of the functional feature,
defined by the logical expression given earlier, and the
corresponding shape feature which implements it. The
shape feature is defined by the explanation underlying
the envisionment. For example, the existence of state
z in Figure 8 (c) can be translated to the existence
of vertices v , V4, v , the center distance d, and the fol3
5
lowing constraints:
Cl: \/~+y~—\/a3~+y~>0
C2’
2
—d~ ---(dx(
2
2
>
)+s x(va)+y4x(c —~s))
4
4
4
0
C3: (xz
C4:
Z3
—
x
x ) x (y~— y4) — (y3 — y ) x (z — 24)
4
4
5
(x~— xs) + (ya — d) x (y~. ys) > 0
>
0
Composing prototypes
The functional features have been mapped into two
shape features, each defined as a set of constraints on
the metric diagram of a single ratchet device. Furthermore, the identified transitions impose constraints
on the relative positions of the shape features in the
combined device. For the output member, these can
be satisfied by one and the same object, but the input driver has to be a composition of two levers implementing specifications (1)-(3) and specification (4)_(5),
respectively. The resulting composed device is shown
in Figure 8 (d).
Satisfying compositional constraints
Not all compositional constraints can be specified before composition, but many are only discovered when
the composed device is envisioned. For example, the
composed device has subsumptions as illustrated in
Figure 8 (d), where tips of the levers touch two teeth
of the wheel simultaneously. In this case, the composed levers are blocked from further clockwise movement. Therefore, the paths from state y to z in the
replaced specification (4) are broken. A new subsumption constraint is added to avoid this behavior, starting a search for a better solution which satisfies all
constraints.
We have seen that the constraints describing the
state z and subsumptions involve v , v , v and d,
3 4 5
which are highly nonlinear. Their satisfaction is very
difficult. We attack this problem by an incremental
refinement. In this example, assume that the designer
chooses to change vertex v to search for a solution.
3
By carrying out a region search, the system changes its
position to v = (7.58, 24.00). This results in a new de3
vice as shown in Figure 8 (e). Renewed envisionment
shows that it is in fact a functional forward-reverse
mechanism, and the design is finished.
Conclusions
A main shortcoming of knowledge-based CAD systems
is the fact that precoded design knowledge does not
allow designers to express their creative ideas. In this
paper, we have presented an implemented technique
which shows that knowledge-based technology and creativity are not contradictory concepts.
Qualitative
physics provides the extensible representations needed
to accommodate creative ideas in a knowledge-based
system. Qualitative physics has exactly the functionality required for extending design spaces, as postulated by many researchers in creative design. Using
more complete domain models such as developed for
IIICAD ([Kiriyama et al.,92]), the technique is applicable to more general domains than elementary mechanisms. This points to a new and as yet unexploited
application of qualitative physics as a tool to support
extensible knowledge-based systems.
Our current approach is geared towards supporting creative designs, not generating them automati-
cally. By automatically searching the space of possible geometric structures, it would be possible to construct a fully automatic “creative” system. Such search
might be made more efficient using a large mechanism library and suitable indexing techniques such as
[Sycara and Navinchandra,90]. However, it is not clear
how such a generation process could be guided to only
furnish functionalities which are in fact interesting.
One way to do this might be to provide such a search
with a set of specifications taken from a standard mechanism textbook and ask it to find novel solutions which
satisfy them. However, the combinatorial problems associated with such a search are considerable, and we
consider that only supporting a designer’s creativity
has a greater practical importance.
References
Boi Faltings, Emmanuel Baechler, Jeff Primus. Reasoning about Kinematic Topology. Proceedings of the
11th International Joint Conference on Artificial Intelligence, Detroit, 1989
Boi Faltings. Qualitative Kinematics in Mechanisms.
Artificial Intelligence, 44(1), 1990
Boi Faltings. A Symbolic Approach to Qualitative
Kinematics. Artificial Intelligence, 56(2), 1992
Boi Faltings. Supporting Creativity in Symbolic
Computation. Second International Round-Table
Conference on Computational Models of Creative Design, Heron Island, Queensland, Australia, 1992
Boi Faltings, Kun Sun.
Computeraided Creative Mechanism Design. Proceedings of the
18th International Joint Conference on Artificial Intelligence, Chambery, France, 1993
Ken Forbus, Paul Nielsen, Boi Faltings. Qualitative
Spatial Reasoning. the CLOCK Project. Artificial Intelligence, 51(3), 1991
John Gero. Design Prototypes: A Knowledge Representation Schema for Design. Al Magazine, 11(4),
1990
John Gero. Creativity, emergence and evolution in
design. Second International Round-Table Conference
on Computational Models of Creative Design, Heron
Island, Queensland, Australia, 1992
Y. Iwasaki, R. Fikes, M. Vescovi, B. Chandrasekaran.
How things are Intended to Work: Capturing Functional Knowledge in Device Design. Proceedings of the
13th International Joint Conference on Artificial Intelligence, Chambery, France, 1993
Leo Joskowicz, S. Addanki. From Kinematics to
Shape: An Approach to Innovative Design. Proceedings of the AAAI, St.Paul, August 1988
Takashi Kiriyama, Tetsuo Tomiyama, Hiroyuki Yoshikawa.
Building a Physical Feature Database for Qualitative
Modeling and Reasoning, AAAIFaI1 Symposium, Design from Physical Principles, Cambridge, MA, 1992
Dorothy Neville, Daniel S. Weld. Innovative Design
as Systematic Search, AAAI Fall Symposium, Design
from Physical Principles, Cambridge, MA, 1992
John Newell, Holbrook Horton.
Ingenious
Mechanism for Designers and Inventors, Volume IV.
Industrial Press INC, New York, 1967
Paul Nielsen. A Qualitative Approach to Rigid Body
Mechanics. Ph. D. Thesis, University of Illinois, 1988.
P.M. Sargent. A computational view of creative steps.
Second International Round-Table Conference on
Computational Models of Creative Design, Heron Island, Queensland, Australia, 1992
Devika Subramanian. Conceptual Design and Artificial Intelligence. Proceedings of the 13th International
Joint Conference on Artificial Intelligence, Chambery, France, 1993, pp. 800-809
Katia Sycara, D. Navinchandra. Index Transformation Techniques for Facilitating Creative Use of Multiple Cases. Proceedings of the 12th IJCAI, Sydney,
1991
Brian Williams. Interaction-based Invention: Designing Novel Devices from First Principles, Proceedings
of the National Conference on Artificial Intelligence,
Boston, 1990