Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Cellular repeater wikipedia , lookup
Spark-gap transmitter wikipedia , lookup
Phase-locked loop wikipedia , lookup
Standing wave ratio wikipedia , lookup
Josephson voltage standard wikipedia , lookup
Oscilloscope types wikipedia , lookup
Integrating ADC wikipedia , lookup
Analog television wikipedia , lookup
Analog-to-digital converter wikipedia , lookup
Tektronix analog oscilloscopes wikipedia , lookup
Oscilloscope history wikipedia , lookup
Transistor–transistor logic wikipedia , lookup
Power MOSFET wikipedia , lookup
Surge protector wikipedia , lookup
Index of electronics articles wikipedia , lookup
Two-port network wikipedia , lookup
Audio power wikipedia , lookup
Superheterodyne receiver wikipedia , lookup
Schmitt trigger wikipedia , lookup
Voltage regulator wikipedia , lookup
Power electronics wikipedia , lookup
Current mirror wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Wien bridge oscillator wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Negative-feedback amplifier wikipedia , lookup
Regenerative circuit wikipedia , lookup
Radio transmitter design wikipedia , lookup
Operational amplifier wikipedia , lookup
Rectiverter wikipedia , lookup
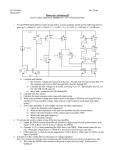
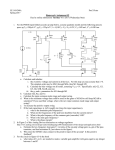
EMFi based Ultrasound Transceivers Silviu Epure, Radu Belea, and Dorel Aiordachioaie Electronics and Telecommunication Department “Dunarea de Jos” Galati University, Romania Abstract—The paper presents some transceivers for ultrasonic transducers based on Emfit Ferro-Electret Film (EMFi). The proposed and discussed transceivers use the wide bandwidth of EMFi material – from audio up to hundreds of kHz, for in-air biomimetic sonar applications, allowing thus to develop new algorithms for object detection, recognition and navigation based on frequency modulation algorithms. Technological process of building new ultrasonic transducers, starting from blank EMFi foil, is presented as well as electronic circuits used for transmitter and receiver. Three transmitter circuits were designed and presented, all of them being capable to drive a capacitive load of about 30pF with 300Vpp sinusoidal signal, up to 300 kHz. Keywords- ultrasounds, transducer, transceiver, receiver, EMFi I. INTRODUCTION The work is part of the research grant “adbiosonar”, [1]. Among others research directions based on sonar image processing, the main objective of the grant is to develop new bio-mimetic sonar heads and new methodologies for sonar based applications having nature as source of inspiration. The new sonar heads must have wide frequency bandwidth, e.g. from 50 kHz up to 300 kHz, in order to be able to develop new algorithms for object detection, recognition and navigation. The absorption of sound in air is significant, at least compared with liquid media, e.g. water. Also, we consider only the behavior in far end field. A model of the computation of sound pressure is presented in [2]. Following [3], transmission losses should be considered as two terms: one generated by the geometrical spreading and the second one by the absorption. The first component does not depend on frequency and in not considered here. The basic classical mechanism of absorption can be expressed as: p(r ) p0 e( f ) r ( f ) 0.022 f 0.6 (2) with f–frequency [kHz] and ( f ) [dB/ft]. Absorption grows more important as frequency get larger. When using transmitted signals with large bandwidths, the strong frequency dependence of absorption distorts the pulse shape considerably, explaining why it is necessary to include this block in the model. At large distances the low pass characteristic of air absorption might even restrict the bandwidth of the transmission channel beyond that of the transducer itself, [7]. Starting from EMFi film without electrodes, we have created transducers and all the necessary circuitry. The paper presents them, as well as the obtained results. Section 2 describes the ultrasonic materials used for transducers, section 3 investigates the receiver. The emitter structures are presented in section 4. Finally, section 5 presents conclusions of the work. Experimental results are presented at the end of each section. II. THE ULTRASONIC TRANSDUCERS We are interested in a wide band frequency transducers, capacitive or piezoelectric, i.e. which could be used in the frequency range [50 kHz–300 kHz]. Based on results reported in literature of ultrasonic sensors, e.g. [8], [9], [10], [11], [12], [13] the EMFi material, [14], was considered. This material has strong electro-mechanical response and can be acquired for research purposes to create custom transducers. It is delivered in sheets of 70-80 µm thick flexible film. By considering a square surface for sensor of 1 cm x 1 cm, the following parameters are valid [14]: (1) sensitivity of the EMFi sensor: Sq [pC/N] = 25-250; (2) the specific capacitance C0 [pF/cm2] = 40. (1) where p0 denotes the pressure without taking absorption into account, r is the propagation distance, and ( f ) is the absorption coefficient measured in attenuation per unit length [dB / m], and frequency depended. Approximate analytical expression for the absorption coefficient ( f ) derived in [4], [5], could be used for objects at different distances. Since an ultrasonic sensor usually is required to operate at all possible humidity, target range calculations should use the largest value of attenuation, [6]. A good estimate for the maximum attenuation in air at room temperature over all humidity for frequencies between 50 kHz and 250 kHz is presented in [6]. Working with no significant load for ultrasonic sensor, e.g. a resistive load greater then 1 MΩ, for a pressure variation of P [N/cm2] the output voltage will be: V (1/ C0 ) Sq P (3) Experimental results require a minimum voltage at the input of the receiver, thus the minimum necessary pressure at the reception point is P V C0 / Sq (4) The simplest type of source is the pulsating sphere. Assuming that the radius a of the sphere is small compared to the wavelength λ of the emitted sound wave, the pressure field can be expressed as a j t kr p(r , t ) j 0 c U 0 k a e r (5) where: U0 is the speed amplitude of the vibration; a average radius of the sphere; ρ0 mass density of an undistributed fluid element. electronics circuits presented in following sections, we have determined the bandwidth, and the directivity of these transceivers, Fig. 2. Continuous sinusoidal signal was used for measurements. A source of particular interest is the rigid piston of radius a mounted flush with the surface of an infinite baffle, and vibrating with a time harmonic motion. The final expression for the pressure of a single source at the point placed at a point of distance r and θ angle is, [2]: c U 0 ka 2 j t kr 2 J1 (ka sin ) p (r , , t ) j 0 e (6) 2r ka sin where J1 represent the Bessel-function of the first kind of order 1. Experiments with EMFi sensors show that the resonance and also the directivity are strongly dependent of the construction of the transducer. The way in which the glue substance is used to connect electrodes to both sides of the sensors has a great impact. This is a draw back of this material because all results concerning the frequency behavior must be associated with the used technology in building of the ultrasonic sensor. A transducer that can be used in emitter as well as in receiver has been built based on following steps: using low density cyanoacrylate adhesive, the EMFi foil is glued to a double sided PCB, Fig. 1a); one side of the PCB will be the active electrode of the sensor; the other will be used as electro-magnetic shield; the second electrode is created by covering the EMFi foil, Fig. 1b) with a thin graphite layer connected to the ground plane, Fig. 1c). Using this solution, capacitive coupling between active electrode in receiver and the transceiver is minimized. Furthermore, the user cannot touch the high voltage active electrode on the transceiver stage. Figure 2. a) Measured frequency response of the channel transducer-airtransducer; b) Polar diagram for EMFi transducer, at 280 kHz Fig. 2a) shows that this transducer have a wide frequency response, with resonant frequency around 250 kHz, unlike the 39-40 kHz transducers that have a bandwidth of a 2..5 kHz. This characteristic must be taken in consideration when the transmitter-air-receiver system will be modeled. The directivity graph has been obtained using ultrasounds with 280 kHz frequency. As can be seen on Fig. 3, at these frequencies, the transducer produces a highly directional beam of ultrasounds, with no measurable lateral lobes. These two properties make the custom transducer well suited for our purpose. III. THE RECEIVER PREAMPLIFIER At the receiver stage, the transducer can be modeled as a 10..20 pF capacitor in series with a wide band signal generator. A preamplifier circuit is needed for signal conditioning. This circuit must have the following properties: high input impedance (higher the better); high sensitivity (50 µV); gain greater than 50dB; bandwidth of [50..500] kHz; single 5V power supply; low distortion; high immunity to capacitive coupling and e.m. noise. Figure 1. Custom transducer: a) PCB; b) PCB and EMFi; c) end product This technology has two important advantages over some classical approach [15], where the EMFi foil is fixed using double-adhesive tape: the adhesive layer, dielectric material in both cases, will act as a parasitic series capacitor, thus tinier layer means higher sensor efficiency; [12] reported a 100 V sensibility receiver using two blocks: a preamplifier with high fixed gain followed by a variable gain stage. In our paper, the receiver in Fig. 3 is based on circuit OPA2301 – a low noise, high-speed, CMOS inputs, operational amplifier, with 150MHz bandwidth. the cyanoacrylate layer is stiffer than adhesive tape, and provide a firmer support for EMFi foil and better sensor efficiency. EMFi transducers have been built in two versions: one with an active area of 4 cm2 used on the transmitter and the other with 1.5 cm2 active area, used on the receiver. Using the Figure 3. a) Schematics, b) Layout of the preamplifier circuit We have used half of the circuit to collect and amplify the signal from transducer terminals. R1 give the input impedance of the preamplifier, R2 and R3 set the gain and capacitor C1 is used to avoid high frequency auto-oscillations. The second operational amplifier is used as low-pass Butterworth filter, to limit the bandwidth at 500 kHz. Fig. 4 presents the measured bandwidth of the preamplifier circuit. Figure 4. Gain of the preamplifier circuit – experimental values The circuit was built on a dual-layer PCB, Fig. 3b): one layer for components and the other used as ground plane. The board size is the same with the transducer size. This way, placing back-to-back the transducer and the preamplifier, shielding the input signal is automatically solved and the length of the wires between transducer and preamplifier is minimized. One of the first tests was to find the sensitivity of the transceiver/receiver pair: transmitter and receiver transducers were placed face-to-face at a distance of 50 cm; a sinusoidal signal close to the resonant frequency and minimum amplitude was emitted, so that at the receiver’s output signal to be greater than noise. Fig. 5a) prove that sensibility is better than 50 µV. IV. THE EMITTER AMPLIFIER The EMFi-based transducer does not require a bias DC voltage but the response of an EMFi-based emitter is proportional to the applied AC voltage, so it is necessary to drive it with high voltages to achieve high sound pressure levels (SPL). For example in [12] signals of about 300Vpp were used. In these respect, three schematic circuits have been built and tested: a hybrid power amplifier with transformer, a bootstrap high voltage amplifier and an active load A-class H bridge amplifier. This chapter presents the most important characteristics of the three circuits, from designing stage to the experimental results. A. Emitter based on transformers A hybrid amplifier is a circuit that includes an operational amplifier and other active components connected in such way that the resulting circuit will exceed one or more op-amp IC limits. Largely, the operational amplifier entity refers to a general-purpose dc voltage amplifier that may be configured by a passive network. This acceptation the hybrid amplifiers are also op-amps. The hybrid op-amp schematic in Fig. 6 consists in IC, T1, T2, R4, R5, R6 and C3. The configuration network is: feedback resistor R2, ground resistor R1 and in loop compensation condenser C2. The circuit amplifier can drive a 2.2 nF piezo-ceramic ultrasonic transducer or a 150 pF EMFI transducer using a 1:30 rising voltage transformer. The hybrid power amplifier was build with a 3 MHz bandwidth op-amp (TL071) and two power transistors BD439 and BD440. The supply voltages are V+ = 15 V and V- = -15 V to allow a maximum output voltage span of 25 Vpp. The amplifier output voltage Vo is applied to the load capacity CL via a 1:30 rising voltage transformer. In this case we can use up 750 Vpp driving voltage. 0° 5° 10° 15° Figure 5. red – voltage at transmitter output; blue – receiver output, a)sensitivity test, b) directivity test, different θ To determine the directivity graph of the transducers, presented on Fig. 2b) we have placed the transmitter in the center of a 50 cm virtual circle and the receiver on the circumference of the circle. Fig. 5b) presents the signal at the transmitter output –red, and signal at the receiver output –blue, for various positions on the circle. The parameter θ represents the angle between transceiver’s normal axis and receiver’s normal axis. Given the 280 kHz frequency used, a slight variation of distance D will lead to considerable phase shift between signals at transmitter and receiver. Fig. 5a) it is a screen capture of INSTEK GDS2062 digital oscilloscope and Fig. 5b) it is a superposition of four captures. Figure 6. The hybrid power amplifier with transformer The unity gain bandwidth of the operational amplifier is 3 MHz and the close-loop amplification is 10. Consequently, the close loop bandwidth is: BW10 BW1 3 MHz 300 kHz ACL 10 (7) The hybrid amplifier has no stability problems, but the in-loop compensation capacity value C2 must be experimentally set [16]. B. Bootstrap high voltage amplifier The supply voltages of the op-amp of Fig. 7 changes dynamically as a function of vo voltage. So the op-amp can cover a peak-to-peak voltage swings greater than the total voltage apply across its supply rails. In the scheme are two Bootstrap feedback loops for supply voltages VC0 and VE0, used for increasing the output voltage span. The TL071 op-amp slew-rate parameter is referred to the ground voltage for constant supply voltages: VC0 = 15V and VE0 = -15 V. The datasheet typical value of Slew-Rate (SR) parameter is SRamp = 13 V/μs. The swing time of the op-amp output voltage is Neglecting the basis current of the two transistors the op-amp supply voltages VCO and VEO results from equations: (12) VC0 (VCC 0.6) R5 vo R6 R5 R6 (8) VE0 (VEE 0.6) R7 vo R8 R7 R8 (9) swing VSamp SRamp 27 V 2.08 μs 13 V/μs If we assume that the swing time of the op-amp output voltage, and the swing time bootstrap amplifier output voltage are equals, the bootstrap amplifier the Slew-Rate is SRboot VSboot swing 93 V V 44 2.08 μs μs (13) The amplifier haves two feedback loops: the negative feedback loop R3, R4 and a positive feedback loop R1, R2. The close loop amplification and the stability condition are: R4 v R3 Au o vi 1 R4 R1 R3 R2 1 Figure 7. The Bootstrap high voltage amplifier We use the same op-amp as in the Fig. 6. If VCC = 50 V, VEE = -50 V, R5 = R7 = 10 kΩ and R6 = R8 = 24 kΩ. Fig. 8 presents the signals vin (green), vo (blue), VC0 and VE0 (red). If VCC = -VEE, R5 = R7 and R6 = R8, from equations (8) and (9) results that VC0 VE0 VCC 0.6 2 R5 R5 R6 (10) In previous enounced conditions the difference between supply voltages VC0 and VE0 is 29 V. The bootstrap amplifier output signal amplitude is R Vpk VCC 0.6 1 6 Vsat R5 (11) where Vsat is the op-amp saturation voltage. If we assumes that Vsat do not exceed 1 V, the op-amp output voltage span (VS) is VSamp = 27 V and bootstrap amplifier the voltage span is VSboot = 93 V. and R4 R1 1 R3 R2 (14) For R1 = 80 kΩ, R2 = R3 = R4 = 100 kΩ resistance values results the voltage amplification Au = 10. If we will use high voltage transistors (ex. STN83003 [17],STP 93003 [18]), faster op-amp (ex. LM7171 [19]) R5 = R7 = 10 kΩ and R6 = R8 = 100 kΩ, the supply voltages can be increase at ±180 V. In above enounced conditions the output signal span will be 336 V. In conclusion, the bootstrap amplifier has a very good Slew-Rate parameter, but due to positive reaction loop, the latch-up risk mast not be ignored. C. Modified active-load A-class amplifier principle In almost all sonar and echolocation applications, the ultrasounds are emitted as a short burst. We speculate this fact to design a high quality amplifier, based on active load A class amplifier principle. The presented circuit has two operating modes: “stand-by” and “burst emission”. Heat will be dissipated (as in all A class amplifiers) only in the “burst emission” mode; this way the electrical efficiency of the circuit is greatly improved. The circuit presented in Fig. 9a) has four functional blocks: (1) voltage-current converter: the op-amp, T2, D2, the shunt resistance R2; (2) active load: T4, R8, and the resistive load R4; (3) voltage divisor: RB1, TB and RB2 that generate the signal Vbias used to bias the active load; (4) electronic switch K that connects the resistor R6, in parallel with R2 when ultrasonic burst is emitted. Because of burst shape of the emitted signal, we propose to reduce the power dissipation between two successive bursts by reducing the collector current of T2 transistor. So we propose that the amplifier works in two operating modes: (1) Burst-Emission: when the contact K is close; Figure 8. Signals vIN (green), vO (blue), VC0 and VE0 (red) (2) Stand-By: when the contact K is open. The voltage-current converter transistor T2 is an A class amplifier all the time, but the constant current generator transistor T4 works in switching mode. As a numeric example for VCC = 200 V, R2 = 1.2 kΩ and R4 = 12 kΩ, in accord to equation (20) we choose IC4 = 15 mA and results: IC4 = 6.6 mA, R6 = 0.36 kΩ and Vref = 5.8 V (adjustable). The next schematic, presented Fig. 10, use H bridge topology with the modified A-class amplifier on each side. Figure 9. a) The modified A class amplifier principle; b) the output characteristics of T2 transistor The open loop active load amplifier has not a stable bias. The resistor R4 is necessary to stabilize the T2 transistor Quiescent-point (Q-point) position. Fig. 9b) presents MATLAB model output characteristics of T2 transistor and the DC Load Lines for the active load R4, T4 and R8, and the Q-point positions for the two positions of the contact K. Due to the active load the A class amplifier has two DC Load Lines. When K = off, the transistor T4 is off, IC4 = 0 and consequently results the equation V V IC 2 CC CE 2 R4 R4 (15) When K = on, T4 is a current constant generator and we get the equation V V IC 2 CC CE 2 IC 4 R4 R4 (16) Figure 10. The A-class amplifier, H bridge topology The current generators bridge arms are connected to the ground and the active loads bridge arms are connected to the supply voltage. As a rule, the inverting branch indexes are odd figures and the non inverting branch indexes are even ones. The capacitive load CL is connected on the other diagonal of the bridge. Fig. 11 presents the output signals vC2, -vC1, and the capacitive load differential signal vC2-vC1. In Fig. 9b) the lower line is equation (15) and the upper line is equation (16). The Q-point position is the intersection point between the output characteristic equation and one of the two previous DC Load Lines. In Burst-Emission mode the Q-point position is set by adjusting Vref dc signal. In Stand-By mode the Q-point position depends on R2 and R4 resistor values. If the output signal is a sine wave, the maximum speed of the output is dvL d max Vpk sin t Vpk dt dt (17) If the output signal peak voltage is 150 V, at 300 kHz, the maximum speed of the output signal is dvL V 2 f Vpk 282 dt μs (18) For the capacitive load class A amplifier the slew-rate is SR I CL V 50 pF 14.13 mA μs The power dissipation was computed in the hypothesis that the H bridge is symmetric and the ratio between burst duration and burst period is 1/40. Table 1 shows the power dissipation calculated for all the elements of H bridge elements. All the components in the H bridge haves the values calculate in previous section. (19) TABLE I. The slew rate of the amplifier must exceed maximum speed of the output signal SR > Voω. If CL = 50 pF, using equation (19) we can calculate the minimum current value for the constant current generator: I min SR CL 282 Figure 11. Signals vc2 (yellow), -vc1 (green) and vc2-vc1 (red) (20) unit T1, T2 T3, T4 R3, R4 POWER DISSIPATION OF H BRIDGE ELEMENTS Burst-Emission dissipate power mW 1500 485 159 Stand-By Medium dissipate power dissipate power mW mW 556 579 0 12 419 352 V. CONCLUSIONS The objective of the work was to presents some results concerning ultrasonic transceivers, both emitters and receivers, tested on a new ultrasonic transducer based on EMFi material. The investigation is completed with experimental results obtained on the working field. To obtain these results, custom transducers were built starting from blank EMFi film. Building details are presented, as well as two main characteristics of the transducers – bandwidth and directivity. Using a latest generation operational amplifier, with superior characteristics, we have built a receiver preamplifier as interface between EMFi transducer and signal processing unit. Gain over 50dB, bandwidth from 0 to 500 kHz, input impedance of 10 MΩ, output swing voltage of 4.8 V, sensibility greater than 50 µV and high immunity to noise makes the receiver “perfect fit” for its purpose. Concerning the transmitter circuit, three topologies were presented, each with its own advantages and disadvantages: amplifier with transformer at the output, which will produce relatively easy high voltage output, but with the narrow bandwidth of the transformer; ACKNOWLEDGMENT The work was supported by the CNMP grant no 12079 / 2008 ADBIOSONAR under PNCDI-II. REFERENCES [1] [2] [3] [4] [5] [6] [7] [8] [9] a bootstrap high voltage amplifier, with wide bandwidth and output amplitude limited only by the unity gain bandwidth of the op-amp; a modified class A amplifier, with wide bandwidth, high voltage output and low power dissipation. [10] Because of the high voltage and high frequency signals used, the distance between amplifier and transducer must be kept at minimum possible value. Long wires will produce e.m. noise and capacitive coupling with the receiver, even if the distance between transmitter and receiver is greater than 10 cm. Using coaxial cable will increase the capacitive load for the high voltage amplifier and will create new problems with impedance matching. [11] One possible solution is to use only SMT components and the high voltage amplifier to be placed back-to-back with the transducer, the same way as on the receiver stage. [14] [15] Given that the size of the emitter transducer is 3 cm x 3 cm, it is possible to design any of the proposed high voltage amplifiers on a dual layer PCB of 3 cm x 3 cm. This way, long wires will not carry high amplitude – high voltage signals. [16] The tested elements offered very encouraging results for creating mapping and movement detection systems. [12] [13] [17] [18] [19] Research grant ADBIOSONAR, CNMP 12079/2008, http://www.adbiosonar.ugal.ro/, 2010. Mizrac A., et al, “3-D Model of the sound pressure field in a meridional section plane of fruit”, Elsv. Ultras., vol 49, 2009, pp.83-88 Kinsler Lawrence E., Austin R. Frey, Alan B. Coppens, and J.V. Sanders, Fundamentals of Acoustics, John Wiley & Sons, Inc. 2000 Bass H., H. Bauer, and L. Evans, “Atmospheric absorption of sound: Analytical Expressions”, JASA, vol. 52, no. 3, 1972pp. 821-825 Evans L., H.E. Bass, L.C. Sutherland, “Atmospheric Absorption of sound: Theoretical Predictions”, JASA, vol. 51, no. 5, 1971, pp. 15551575 Masa, http://www.massa.com/index.htm, 2009 Peremans H., Tri-aural perception for mobile robots, PhD Thesis, Univ. of Gent, Depart. of Electronics and Inf. Syst., Belgium, 1994 Lerch, Reinard; Streicher alexander; Sutor Alexander, “Broadband Ultrasonic Transducer”, 19th International Congress on Acoustics, Madrid, 2-7 September 2007. Joachim Doring, Viktor Bovtun, Jurgen Bartusch, Uwe Beck, Mac Kreutzbruck, “Cellular Polyproplylene Ferroelectret Films Piezolectric Material For Non-Contact Ultrasonic Transducers”, 17th World Conference on Nondestructive Testing, 25-28 Oct. 2008, Shangai, China. Viktor Bovtun, Joachim Doring, Jurgen Bartusch, Uwe Beck, Anton Erhard, “EMFIT Ferroelectret Film Transducers for Non-contact Ultrasonic Testing”, ECNDT 2006. Alexander Streicher, Rolf Muller, Herbert Peremans, M. Katenbacher, Reinhard Lerch, Ferroelectrets, “Ultrasonic Transducers for a Biomimetic Sonar System”, IEEE International Ultrasonics, Ferrolectrics and Frequency Control Joint 50th Anniversary Conference, 2004, pp. 1142-1145. Ana Jimenez, et al, “EMFI-based ultrasonic transducer for robotic applications”, Sensors and Actuators, A. vol. 148, 2008, pp. 342-349. Mika Paajanen, Jukka Lekkala, Kari Kirjavainen, “ElectroMechanical Film (EMFi) – a new multipurpose electret material”, Sensors and Actuators, vol. 84, 2000, pp. 95-102. EMFIT film specifications, www.emfit.com, 2009. Joao L. Ealo, Jorge Camacho, Carlos Fritsch, Fernando Secoand Javier,“ A fabrication procedure for airborne ultrasonic phased arrays based on cellular electromechanical film“, Ultrasonics Symposium, 2008. IUS 2008. IEEE, 2-5 Nov. 2008, pp. 891-894 R. Belea, S. Epure, Practical In-Loop Compensation of a Hybrid Amplifier Driving a Capacitive Load, Proceedings of International Conference on Electronics, Computers, and Artificial Intelligence ECAI 2009, Edition 3rd, 3-5 July, 2009, Pitesti ROMANIA, No.2/2009 ISSN 1843 2115, pp. 19-26. http://www.st.com/stonline/products/literature/ds/12325/stn83003.htm http://www.st.com/stonline/products/literature/ds/12329/stn93003.htm http://www.national.com/mpf/LM/LM7171.html