Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Tensor operator wikipedia , lookup
Bra–ket notation wikipedia , lookup
Determinant wikipedia , lookup
System of linear equations wikipedia , lookup
Cartesian tensor wikipedia , lookup
Linear algebra wikipedia , lookup
Eigenvalues and eigenvectors wikipedia , lookup
Quadratic form wikipedia , lookup
Non-negative matrix factorization wikipedia , lookup
Jordan normal form wikipedia , lookup
Basis (linear algebra) wikipedia , lookup
Singular-value decomposition wikipedia , lookup
Perron–Frobenius theorem wikipedia , lookup
Four-vector wikipedia , lookup
Cayley–Hamilton theorem wikipedia , lookup
1. (14 points) Consider the system of differential equations
dx1
= x1 + 2x2 ,
dt
dx2
= kx1 − 4x2 .
dt
(a) Solve the system if k = −2, x1 (0) = −3 and x2 (0) = 3.
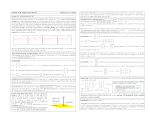
(b) Sketch the phase portrait for this system when k = −2.
(c) For which values of k will the trajectories in the phase portrait be spirals into the origin?
spirals out of the origin? Explain.
2. (14 points) Let R be the region in the plane defined by the inequality
x21 x22
+
≤ 1.
16
4
(a) Sketch the region R.
#
"
1 −1
, then sketch the transformed region T (R). (No cal(b) If T (x) = Ax where A =
1
1
culations are needed here. Just think about the geometric meaning of the transformation
T .)
(c) Calculate A10 .
(d) If B =
"
#
−1 1
, then calculate B 10 .
−5 3
3. (14 points) Use the method of least squares to determine the coefficients a and b of the
parabola y = ax + bx2 that best fits the three data points
(x1 , y1 ) = (1, 1),
(x2 , y2 ) = (2, 0),
and (x3 , y3 ) = (−1, 1).
4. (14 points) Consider the quadratic form in 3 variables
Q(x, y, z) = 2x2 + 2y 2 + 2z 2 + 2xy + 2kyz.
(a) Find a real symmetric matrix A so that Q(x, y, z) =
(b) If k = 0 then what are the eigenvalues of A?
h
x y z
i
x
A y
.
z
(c) Find the points (x, y, z) that are closest to the origin on the surface S defined by the
equation 2x2 + 2y 2 + 2z 2 + 2xy = 1.
5. (14 points) Let {~e1 , ~e2 , ~e3 } denote the standard basis of R3 and let B denote the basis
{~v1 , ~v2 , ~v3 } where
~v1 = ~e1 + ~e2 ,
~v2 = −2~e1 − ~e2 + ~e3 ,
~v3 = ~e1 − 2~e3 .
Let T be the linear transformation on R3 determined by
T (~v1 ) = ~v1 ,
T (~v2 ) = ~v1 + 2~v2 ,
T (~v3 ) = ~v1 − 2~v2 + ~v3 .
(a) What is the matrix B of the transformation T with respect to the basis B?
(b) Is there a basis E for R3 so that the matrix of T with respect to E will be diagonal?
Explain.
(c) Find the volume of the parallelepiped with edges
w
~ 1 = T 10 (~e1 ),
6. (15 points) The matrix A =
w
~ 2 = T 10 (~e2 + ~e3 ),
1 −1
1 0
2 −1
0 1
1
2 −5 3
1
1 −3 2
w
~ 3 = T 10 (~e2 − ~e3 ).
is row equivalent to
1
0
0
0
0 −1 1
1 α β
.
0
0 0
0
0 0
(a) Find α and β.
(b) Find a basis for the kernel of A.
(c) Compute the orthogonal projection of the vector
1
1
1
1
onto the kernel of A.
(d) Let B denote the matrix of reflection across the kernel of A. Find the area of the triangle
whose vertices are
0
1
1
0
1
1
,
, and B
.
0
1
1
0
1
1
(e) Let C be the matrix of orthogonal projection onto the orthogonal complement of the
kernel of A.
True or False: AC~x = A~x for every ~x in R4 . (Justify your answer.)
7. (15 points) Determine whether the following statements are true or false. As usual, briefly
justify your answer. Your answer will be graded on its clarity and completeness.
(a) If ~v1 , ~v2 and ~v3 are linearly independent vectors in R3 then so are w
~ 1 = ~v1 + ~v2 + 2~v3 ,
~
w
~ 2 = 2v1 − ~v2 + ~v3 and w
~ 3 = −~v1 + 5~v2 + 4~v3 .
T
(b) There is a (real) 2 × 2 matrix B satisfying BB =
"
#
1 3
.
3 4
(c) There is a 3 × 3 matrix A where both A and A − I3 have a two dimensional kernel.
1 0 0
1 2 0
(d) The matrix
0 1 0 is similar to 0 1 2 .
0 2 1
0 2 1
(e) Let L denote the line parametrized by (t, t) in the plane. Suppose that A is a 2 × 2
matrix whose image is L and whose kernel is the perpendicular line L⊥ . Then A is the
matrix of orthogonal projection onto L.