Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Anti-reflective coating wikipedia , lookup
Mössbauer spectroscopy wikipedia , lookup
Schneider Kreuznach wikipedia , lookup
Birefringence wikipedia , lookup
Fourier optics wikipedia , lookup
Reflecting telescope wikipedia , lookup
Image stabilization wikipedia , lookup
Retroreflector wikipedia , lookup
Lens (optics) wikipedia , lookup
Ray tracing (graphics) wikipedia , lookup
Nonimaging optics wikipedia , lookup
ECEN 4616/5616
2/13/2013
Aberrations
Prolog:
1) “Aberrations” will be considered as small errors in an optical system that is already
producing a reasonable image. This means that wavefronts will deviate from the ideal
(usually spherical, for an imaging system) by only a few wavelengths.
Ground glass, structural glass bricks and shower doors won’t be considered suitable for
analysis by aberration theory.
2) We won’t derive the equations for the common aberrations, but will (hopefully) make
them seem intuitively correct and provide enough information to allow one to re-create
the derivation if necessary.
“Third-Order” Aberrations:
It’s not perfectly clear how this name came about (and it isn’t consistent: some
expressions involve terms to the 4thpower, (and there are no “second-order” aberrations).
The calculation of 3rd order aberrations involves assuming that the ray paths are
“essentially” the same as given by Gaussian optics, but the ray path lengths are, in
general, different. This works because very small (~ 1λ) path length differences between
rays can cause significant loss of performance in a lens.
Third-order aberrations constitute the major aberrations in optical systems where the rays
are close enough to the z-axis that the first two terms of the Taylor expansion for sin are
“good enough”:
sin
3
6
Perhaps this is where the name came from.
Historical Significance:
The theory of 3rd order aberrations was first published in an 1857 paper by Ludwig von
Seidel, hence they are also known as Seidel Aberrations. Historically, 3rd order
aberrations were important because they can be calculated using only paraxial ray traces.
This only works in the region where the ray paths are substantially similar to the
Gaussian ones. Another statement of the 3rd order approximation might be “the region,
greater than paraxial, where finite rays follow “essentially” the same path as paraxial
ones.
pg. 1
ECEN 4616/5616
2/13/2013
How to measure aberrations:
Rays: We want all rays from an object point to arrive at the corresponding image point.
In a less than perfect system, however, rays that stray from the paraxial region are likely
to arrive at the image plane some distance away from the paraxial image point. The
distance that a ray misses the image point is called “Transverse Ray Aberration” (TRA),
usually given as the x or y distance from the image point and plotted as a function of ray
height in the stop. The following plot shows how, the further from the z-axis a ray is, the
more TRA it suffers:
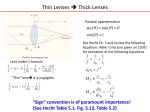
Transverse Ray Aberration due to Spherical Aberration:
pg. 2
ECEN 4616/5616
2/13/2013
TSA in X and Y plotted vs. height in pupil:
Wavefront Errors: Seidel aberrations are typically given in waves of difference, at the
exit pupil, between the ideal spherical wave front converging on the image point and the
actual wavefront. Wave aberrations and Transverse Ray aberrations are related as shown
in the following graphic:
y
a
TRA
W
Actual
wavefront
Ideal sphere
The wavefront aberration, W, is the sag difference between the actual wavefront and the
ideal spherical wavefront centered on the paraxial image point. The angle, a, between the
W
ideal ray and the real ray is just slope of W,
, and the Transverse Ray Aberration is:
y
pg. 3
ECEN 4616/5616
2/13/2013
W
y
y
(Note; W is not the aberrated wavefront, but the difference between the aberrated
wavefront and the ideal sphere.)
TRA y R
By tracing a number of rays through the pupil, and measuring the TRA of each, we can
get the slope of W; then by numerical integration, we can find the wavefront aberrations,
W. Somewhat remarkably, therefore, we can find W without having to track the path
length of the rays we use to find it. (This is the way a Shack-Hartmann wavefront sensor
works.)
Conversely, if we know W, we can calculate the TRA for each ray through the pupil,
since the rays are perpendicular to the wavefront which is Zsphere + W. Hence the wave
and ray aberration measures are equivalent, and each can be calculated from the other.
You can find sets of fairly complex equations to calculate the Seidel aberrations from the
paraxial ray heights and angles. With the advent of computer ray-tracers, however, it is
more common now to let the computer do these calculations. Note that the larger the
actual angle of incidence of a ray on a surface, the greater the angular (and hence
wavefront) deviation from paraxial optics will be.
Total (3rd order) aberrations are the sum of the aberrations of
each element:
This is one of the most important results of 3rd order aberration theory, as it allows us to
design systems with the basic aberrations pre-corrected. This is similar to the achromat
theory, where the paraxial chromatic focal shift can be eliminated by choosing the right
power combination for a doublet. The achromatic paraxial doublet is not necessarily a
good lens at higher apertures, but is a necessary starting point – the chromatic focal shift
can’t be corrected, unless it is corrected paraxially. We will look at this from both the
ray and wave views:
pg. 4
ECEN 4616/5616
2/13/2013
Sum of ray aberrations: The following figure shows a system with 3 components
(surfaces, thin lenses, etc.) with the Chief ray (through the center of the stop) and a ray
passing through some point of the stop off center where we want to know the aberration.
Each ray is traced from the object point, O, to the corresponding image point, I.
C
A
E
ray
B
O
D
I
C
chief ray
E
A
L1
L2
L3
where the underlined variables are points specific to the chief ray.
Since the wave aberration at each pupil height is the difference between the ray path
length traced at that height, and the chief ray (through the center of the pupil), the total
wave aberration, W, at the height of the ordinary ray is:
W = [OABCDEI] – [OABCDEI]
= {[OAB] – [OAB]} + {[BCD] – [BCD]} + {[DEI] – [DEI]}
= W(L1) + W(L2) + W(L3)
Hence, in the approximation where the finite ray paths stay “near” to the Gaussian ones,
the total wave aberration (and hence total TRA also) is just the sum of the aberration
through each lens.
pg. 5
ECEN 4616/5616
2/13/2013
Sum of Wave Aberrations: Since wave and ray aberrations are equivalent (in the 3rd
order approximation), this would seem unnecessary. However, tracing wave aberrations
gives us a simple way to calculate the aberration from the height of a paraxial ray on the
surface.
In the paraxial approximation, we characterized the effect of a lens as just putting a
variable delay on an incoming wave front, which is a function of the optical thickness of
the glass at each point. This also works as a 3rd order approximation, because we are
considering the change of direction of a ray to have a significant effect only on the
wavefront error, and an insignificant effect on its future path. For the wave 3rd order
approximation, this means that we can consider deviations from the perfect spherical
wave to propagate essentially the same as the perfect spherical wave.
O
I
L1
L2
L3
In the 3rd order approximation (for waves, that would be that the wavefront errors don’t
significantly change the overall propagation direction), total wavefront distortions are the
sum of the wavefront distortion added by each element.
The delay, d, imposed on a ray (or a piece of wavefront) by passing through a material of
index, n, and thickness, t, is: d = (n-1)t
n
t
d
Hence, the delay imposed on a plane wavefront passing through a thin lens is d = (n-1)t.
pg. 6
ECEN 4616/5616
2/13/2013
t
Sw
d(r)
r
Z
n
S1
S2
For a thin lens, the delay, as a function of distance from the Z axis is:
d (r ) (n 1)t S1 (r ) S2 (r ) ,
and the sag of the wavefront, Sw is:
SW (r ) (n 1)S L (r )
where SL(r) is the total decrease (sag) of the lens from its center thickness.
c 2
r , then
2
the sag of the wavefront is also a (paraxially approximated) sphere. However, in the 3rd
order approximation, we will use the next term in the Taylor expansion for a sphere:
cr 2
c
c3
S L (r )
r2 r4
2
8
1 1 c 2r 2
In the paraxial approximation, where the sag of a lens can be approximated by
Multiplying this expression by (n-1) does not give an approximation to a sphere, since
3
3
c
c
n 1 n 1
2
2
Taking the difference between the expression for SW and a sphere centered on the image
plane will give the wavefront distortion, W.
Note that, in general, W will be greater for larger n, and larger Sags, and larger distance
from the Z-axis.
pg. 7
ECEN 4616/5616
2/13/2013
List of (monochromatic) Seidel Aberrations:
Spherical Aberration: Different heights on a spherical lens have different
focal lengths.
Coma: For off-axis objects, the rays through different heights on a
spherical lens will have different magnifications (and hence, arrive at
different points on the image plane).
Astigmatism: Rays in the plane of the Z-axis (tangential plane) have a
different focal length than rays in the perpendicular plane (sagittal plane,
which intersects the axis at the entrance pupil). Only off-axis astigmatism
is present in a lens with spherical surfaces, but on-axis astigmatism can
be caused by cylindrical lenses.
pg. 8
ECEN 4616/5616
2/13/2013
Field Curvature: A flat object plane is imaged to a curved image plane –
this is a paraxial, as well as a 3rd order aberration.
Distortion: The magnification changes with increasing field angles.
Zemax aberration analysis:
Zemax will report (list or graphically) the 3rd order aberrations of a system
surface-by-surface and the sum. This allows one to see which surfaces are
problematical, and how they may be corrected.
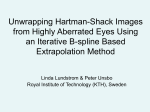
Following is a layout of a “Tessar” camera lens and the corresponding graph of the 3rd
order aberrations on a surface-by-surface basis, plus the total sum:
Tessar Lens Layout
pg. 9
ECEN 4616/5616
2/13/2013
Third-Order element aberrations of Tessar
Note that the sum of all aberrations is quite small (right-hand column), even though the
aberrations of some surfaces are large.
Correcting Aberrations:
What affects the wavefront aberration?
Stop Position: Where the stop is positioned can change the ray heights on the
other elements in the system, thus changing their contributions to the total
aberration.
Index of refraction: Elements of a given power made with lower index materials
will have more aberrations (due to larger sags) than the same power element made
with a high index glass.
Orientation of elements: Reversing a lens will change the ray angles on its
surfaces, hence will effect aberrations.
Including surfaces opposite aberrations: Generally, negative lenses will have
the opposite sign of aberrations of positive lenses.
pg. 10
ECEN 4616/5616
2/13/2013
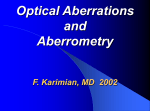
Example: The landscape lens with and without the remote stop:
Landscape lens with remote stop
pg. 11
ECEN 4616/5616
2/13/2013
Landscape lens without remote stop: Less total distortion, but poor performance at
the edge of the field.
pg. 12
ECEN 4616/5616
2/13/2013
The Aberration Polynomial:
So far, we haven’t asked what the functional form of W might be. If we restrict ourselves
to rotationally symmetric optical systems, we can limit the possible forms W might take.
If we assume a 2-Dimensional polynomial form for W, and eliminate all terms and
combination of terms that are not rotationally invariant. Conceptually, W can depend on
both the pupil location, given by r , , (in polar coordinates) and the object position given
by , . The final variable, , is redundant, in that we can choose the axes such that it is
zero (i.e., we only consider object points on the y-z plane).
The combined terms that are rotationally invariant and without discontinuities (another
arbitrary constraint) are:1
r 2 , 2 , and r cos( ) , and the form of W is a summation of terms of the form:
(r 2 ) i ( 2 ) j r cos , where i,j,k are integers.
This is usually written as:
n
r m l cos
where l=2j+k, m = 2i+k, n = k. This notation separates the exponent for the object
position, l, from the exponents of the pupil position, m,n. The general notation for the
terms of the aberration polynomial is written:
j
Wmn l r m cos
n
l
Restricting ourselves to values of i,j,k of 0,1,2 there are a total of 7 terms that represent
actual aberrations (some terms simply represent a DC shift which can be removed by a
coordinate shift and are not actual aberrations). Excluding the terms which can be cured
by shifting the focal plane, we are left with the 5 “Seidel Aberrations”:
0W40
1W31
2W22
2W20
3W11
r4
r3cos
2r2cos2
2r2
3rcos
Spherical aberration
Coma
Astigmatism
Field Curvature
Distortion
These aberrations show up in monochromatic systems. Two other aberrations, 1W11
(transverse focal shift) and 0W20 (longitudinal focal shift), don’t degrade a
monochromatic image, but show up as chromatic focal shift and lateral color in multiwavelength systems.
1
See, for example, page 205 in Geometrical Optics and Optical Design, Mouroulis and Macdonald, or a
similar text for a more complete justification.
pg. 13