Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Electrical engineering wikipedia , lookup
Electrical ballast wikipedia , lookup
Transformer wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Mercury-arc valve wikipedia , lookup
Electronic engineering wikipedia , lookup
Power engineering wikipedia , lookup
Current source wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Electrical substation wikipedia , lookup
Power inverter wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Three-phase electric power wikipedia , lookup
Transformer types wikipedia , lookup
Schmitt trigger wikipedia , lookup
Power MOSFET wikipedia , lookup
Distribution management system wikipedia , lookup
History of electric power transmission wikipedia , lookup
Power electronics wikipedia , lookup
Surge protector wikipedia , lookup
Buck converter wikipedia , lookup
Voltage regulator wikipedia , lookup
Stray voltage wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Alternating current wikipedia , lookup
Voltage optimisation wikipedia , lookup
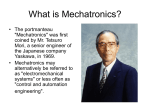
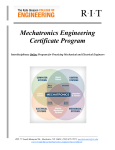
MECATRONICA 1. Sem. 1-2007 Universidad EAFIT Profesores: Hans Ley (Dipl.-Ing.) y Alejandro Velásquez (MSc.Mechatronics) 1 1. OVERVIEW 1.1. Origin: The word mechatronics was first coined by a Japanese company; Yaskawa, in 1969, as a combination of "mecha" of mechanisms and "tronics" of electronics and the company was granted the trademark rights on the word in 1971.The word soon received broad acceptance in industry and, in order to allow its free use, Yaskawa elected to abandon its rights on the word in 1982. For this wider concept of mechatronics, a number of definitions has been proposed in the literature, differing in the particular characteristics that the definition is intended to emphasize. The most commonly used one emphasizes synergy: “Mechatronics is the synergistic integration of mechanical engineering with electronics and intelligent computer control in the design and manufacture of products and processes.” Sem. 1-2007 Universidad EAFIT Profesores: Hans Ley (Dipl.-Ing.) y Alejandro Velásquez (MSc.Mechatronics) 2 1.2. Other definitions: Ohio State University in Columbus: “The confluence of traditional design methods with sensors and instrumentation technology, drive and actuator technology, embedded real-time microprocessor systems, and real-time software." University of Applied Sciences Weingarten – Ravensburg: “Mechatronics is an interdisciplinary, system oriented discipline, comprising developing technical solutions at the interface of mechanical engineering, electrical engineering and computer science. It deals with the increasing integration of mechanical systems with digital electronic systems and information technology.” Sem. 1-2007 Universidad EAFIT Profesores: Hans Ley (Dipl.-Ing.) y Alejandro Velásquez (MSc.Mechatronics) 3 1.3. Importance: With a focus on these kinds of skills, mechatronics is seen as a prime career path for mechanical engineers of the future. "I believe that mechanical engineers with a mechatronics background will have a better chance of becoming managers," said Thomas S. Moore, general manager for liberty and technical affairs at Chrysler Corp. in Madison Heights, Mich. "We see mechatronics as the career of the future for mechanical engineers." The view of Belgian robotics researcher Hendrik M. J. Van Brussel, published in Transactions (June 1996), follows a similar fundamental theme but with a different emphasis. "In the past, machine and product design has, almost exclusively, been the preoccupation of mechanical engineers," he wrote. Solutions to control and programming problems were added by control and software engineers, after the machine had been designed by mechanical engineers. This sequential-engineering approach usually resulted in suboptimal designs. Sem. 1-2007 Universidad EAFIT Profesores: Hans Ley (Dipl.-Ing.) y Alejandro Velásquez (MSc.Mechatronics) 4 "Classically trained mechanical engineers will run the risk of being left out of the interesting work" carried on by multidisciplinary product design teams, according to John F. Elter, vice president of strategic programs at Xerox Corp. in Webster, N.Y. "At Xerox, we need designers who understand the control theory well enough to synthesize a better design. These people will have much more of a chance to lead." Elter added that "the mechanical engineers who know some computer science are far more valuable than the computer scientists who know some mechanical engineering. The mechanical engineers have a better feeling for the overall system and do a better job of making the crucial trade-offs. One possibility is that the mechatronics practitioner will prototype the whole design, then the specialists in the various disciplines will take over the detail design." Taken from Sem. 1-2007 http://www.memagazine.org/backissues/may97/features/mechtron/mechtron.html Universidad EAFIT Profesores: Hans Ley (Dipl.-Ing.) y Alejandro Velásquez (MSc.Mechatronics) 5 1.4. Integration: •Kinetics System •Statics Modelling •Materials •Mechanisms •Neumatics •Hydraulics •Actuators •Relays •Motors Actuators Sensors •SolidWorks •Autodesk Inventor •Mechanical Desktop •ANSYS •C •Visual Basic •Algorithms Sem. 1-2007 •Signal processing •Sensors •Circuits •Op Amps •Timer Simulation Microcontrollers LabView Matlab Universidad EAFIT Profesores: Hans Ley (Dipl.-Ing.) y Alejandro Velásquez (MSc.Mechatronics) •Feedback •Cascade Control •Adaptive Control •Modelling •1st Order Systems •2nd Order Systems 6 1.5. Examples Light-Weight-Robot Sem. 1-2007 Artificial Heart Universidad EAFIT Profesores: Hans Ley (Dipl.-Ing.) y Alejandro Velásquez (MSc.Mechatronics) 7 1.5. Examples Sem. 1-2007 Universidad EAFIT Profesores: Hans Ley (Dipl.-Ing.) y Alejandro Velásquez (MSc.Mechatronics) 8 Tasks for this semsester Construction of a model of an assembly plant - mechanical construction - selection of the sensors and the actuators - selection of the control system (PLC, µ -controller, LabView, …..) Basics of electronics and informatics Theory of invention (Triz) Using a communication platform (Wiki) Sem. 1-2007 Universidad EAFIT Profesores: Hans Ley (Dipl.-Ing.) y Alejandro Velásquez (MSc.Mechatronics) 9 Automatic Bull´s Eye Dancing Robots Keyboard Testing Device Motion Control Videos taken at Automatica Fair. Munich, Germany. May 2006. Sem. 1-2007 Universidad EAFIT Profesores: Hans Ley (Dipl.-Ing.) y Alejandro Velásquez (MSc.Mechatronics) 10 2. AC/DC POWER SUPPLY 2.1. Why do we have AC? AC is the preferred method of delivering electricity because devices can be used to break the voltage down into smaller pieces. Because there is no variation, there is no way to break the voltage into smaller pieces. A transformer can be used to break 220v AC down to 110v AC. High voltage lines can be used to deliver 15,000v to a neighborhood and local transformers will break the electricity down for the homes. DC doesn't have the cycle variation, a 220v DC flow is always +220v. 2.2. Properties of AC? 2.2.1 Amplitude This is just how positive or negative the voltage is, with respect to some selected neutral reference. With DC the voltage is constant at some measurable value. But AC is constantly changing. Sem. 1-2007 Universidad EAFIT Profesores: Hans Ley (Dipl.-Ing.) y Alejandro Velásquez (MSc.Mechatronics) 11 Mathematically, the amplitude of a sine wave is the value of that sine wave at its peak. This is the maximum value, positive or negative, that it can attain. However, when we speak of an AC power system, it is more useful to refer to use the effective voltage or current. This is the rating that would cause the same amount of work to be done (the same effect) as the same value of DC voltage or current would cause. That's why rms (or effective) values are useful: they give us a way to compare ac voltages to dc voltages Effective Voltage: = RMS (Root Mean Square) Voltage: Effective Voltage is equal to the square root of the mean value of the squares of all the instantaneous values of an AC voltage Average Voltage: Although the average of a bounded sinusoidal function is zero, the "effective" value is not zero. For example, electric hot water heaters work very well on sinusoidal voltages, with zero average values. Sem. 1-2007 Universidad EAFIT Profesores: Hans Ley (Dipl.-Ing.) y Alejandro Velásquez (MSc.Mechatronics) 12 2.2.2 Sinusoidal Signals Veff V 2 110VAC is actually the RMS value which is usefull for the energy company. But the voltage peak value is 155.55V. Measuring Tip: When used to measure ac voltages or currents, the multimeter gives you something called the effective value, or rms value. While using the oscilloscope, it gives the peak to peak value. Sem. 1-2007 Universidad EAFIT Profesores: Hans Ley (Dipl.-Ing.) y Alejandro Velásquez (MSc.Mechatronics) 13 Formula demonstration of the VRMS for Sinusoidal signals Eeff Esin Veff2 T 1 2 T V (t ) dt R R 0 1 2 V peak Sin (2 f t ) dt T 0 T Veff2 Veff2 2 eff V T 2 V peak 2 T T Sin 2 2 f t dt 0 Veff2 T 1 Cos4 f t dt 0 Veff 2 T 2 V peak Sem. 1-2007 V T 0 0 0 2 V peak Sin 4 f T T 0 0 2 T 4 f 2 V peak Sin 4 1 T 0 0 2 T 4 f Veff2 Veff2 2 V peak Veff2 2 V peak 2 peak Universidad EAFIT Profesores: Hans Ley (Dipl.-Ing.) y Alejandro Velásquez (MSc.Mechatronics) 2 14 2.3. Why do we need an AC/DC Power Supply? Because the two major families of logic devices, which are TTL and CMOS, work under DC voltages. Typically 5V and 12V. Sem. 1-2007 Universidad EAFIT Profesores: Hans Ley (Dipl.-Ing.) y Alejandro Velásquez (MSc.Mechatronics) 15 Sem. 1-2007 Universidad EAFIT Profesores: Hans Ley (Dipl.-Ing.) y Alejandro Velásquez (MSc.Mechatronics) 16 Other types of DC power sources for CMOS devices. Sem. 1-2007 Universidad EAFIT Profesores: Hans Ley (Dipl.-Ing.) y Alejandro Velásquez (MSc.Mechatronics) 17 2.4. FIRST PROJECT – AC/DC POWER SUPPLY 2.4.1. Block Diagram: 110 AC Sem. 1-2007 Universidad EAFIT Profesores: Hans Ley (Dipl.-Ing.) y Alejandro Velásquez (MSc.Mechatronics) 18 2.4.2. Common Circuit Diagram: Note: This configuration applies for 230V (Europe). Sem. 1-2007 Universidad EAFIT Profesores: Hans Ley (Dipl.-Ing.) y Alejandro Velásquez (MSc.Mechatronics) 19 2.4.3. Transformer: Function: A transformer is a device used to increase (step up) or decrease (step down) the AC voltage in a circuit. Properties: Laminated in order to reduce power losses through Eddy Currents. Operation: The way transformers operate is based on the principle that an alternating current in the primary coil will induce an alternating emf on the secondary coil due to their mutual inductance. Sem. 1-2007 Universidad EAFIT Profesores: Hans Ley (Dipl.-Ing.) y Alejandro Velásquez (MSc.Mechatronics) 20 2.4.3.1. What is happening inside a transformer? 2. Energizing the coil and thus magnetic flux generation. 1. Iron Core molecules before energizing. 3. Iron Core molecules line up after energizing. 2.4.3.2. And by mathematical means... The magnetic flux is time-variable at a stationary surface (The cross sectional Area of the iron core). Eqn 1. Sem. 1-2007 Universidad EAFIT Profesores: Hans Ley (Dipl.-Ing.) y Alejandro Velásquez (MSc.Mechatronics) Eqn. 2 21 Eqn 1 & Eqn 2 Eqn 3 Eqn 4. Eqn 3 & Eqn 4 Eqn 5 Q1. IS IT POSSIBLE TO TRANSFORM DC CURRENT INTO A LOWER VALUE DC BY USING A TRANSFORMER? Q2. WHAT IS THE MEANING OF MUTUAL INDUCTANCE? Sem. 1-2007 Universidad EAFIT Profesores: Hans Ley (Dipl.-Ing.) y Alejandro Velásquez (MSc.Mechatronics) 22 2.4.4. Rectifier: 2.4.4.1.Diode Ideal Diode Sem. 1-2007 Real Diode Universidad EAFIT Profesores: Hans Ley (Dipl.-Ing.) y Alejandro Velásquez (MSc.Mechatronics) 23 2.4.1.2. Half Wave Rectifier: Sem. 1-2007 Universidad EAFIT Profesores: Hans Ley (Dipl.-Ing.) y Alejandro Velásquez (MSc.Mechatronics) 24 2.4.1.3. Full Wave Rectifier: Link to PDF with the bridge rectifier animation One disadvantage of the full-wave rectifier is that there is a voltage loss of 1.4V across the diodes. Sem. 1-2007 Universidad EAFIT Profesores: Hans Ley (Dipl.-Ing.) y Alejandro Velásquez (MSc.Mechatronics) 25 You could either build a full wave rectifier bridge out of 4 diodes (i.e. 1N4001 capable of 50V and 1A) or an already made rectifier as the one shown below: While the full-wave rectifier is an improvement on the half-wave rectifier, its output still isn't suitable as a power supply for most circuits since the output voltage still varies between 0V and Vs-1.4V. So, if you input 12V AC, you will get 10.6V DC output. This is why the 'smoothing' block, described in the next chapter is required. Sem. 1-2007 Universidad EAFIT Profesores: Hans Ley (Dipl.-Ing.) y Alejandro Velásquez (MSc.Mechatronics) 26 2.4.5. Smoothing: Vr I Vr 2C. f Where: I [Amps], C [F], f [Hz] and Vr [V] Note: The ripple voltage shouldn't be higher than 10% of Vs. Sem. 1-2007 Universidad EAFIT Profesores: Hans Ley (Dipl.-Ing.) y Alejandro Velásquez (MSc.Mechatronics) 27 Ex 1: What should be the Capacitance to appropriately smooth an 24Vpp AC signal, 60Hz and 1A? I 1A C 6950F 2 Vr f 2 0,112V 60Hz Ex 2: How big would the Ripple voltage be if the current gets reduced to 500mA? I 0,5 A Vr 0.6V 3 2 C f 2 6,95e 60 Hz Compromise: • Availability of components • Price of components • Ripple voltage Q3: What factors affect the amount of ripple? Sem. 1-2007 Universidad EAFIT Profesores: Hans Ley (Dipl.-Ing.) y Alejandro Velásquez (MSc.Mechatronics) 28 2.4.6. Regulation: Reason: While there are many circuits that will tolerate a smoothed power supply, some must have a completely regular supply with no ripple voltage. If the ripple voltage is too large and the input voltage to the regulator falls below the regulated voltage of the regulator, then of course the regulator will not be able to produce the correct regulated voltage. As a rule of thumb the input voltage to a regulator should usually be at least 2V above the regulated voltage. Sem. 1-2007 Universidad EAFIT Profesores: Hans Ley (Dipl.-Ing.) y Alejandro Velásquez (MSc.Mechatronics) 29 By using the brochures of the components all the requirements can be found. Sem. 1-2007 Universidad EAFIT Profesores: Hans Ley (Dipl.-Ing.) y Alejandro Velásquez (MSc.Mechatronics) 30 END Sem. 1-2007 Universidad EAFIT Profesores: Hans Ley (Dipl.-Ing.) y Alejandro Velásquez (MSc.Mechatronics) 31