Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
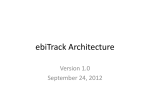
B SSBOT Abstract: BassBot is an electromechanical robot that plays an electric bass guitar through user interface and presong programming. This unit allows the user to download MIDI songs to play autonomously or play in real time through the use of an iPad application. [4] Rails [5] Sliders [6] Belts [3] Pluck Solenoids [2] Stepper Motors [1] PC [7] Lift Solenoids [8] Secondary Microcontrollers Marketing Requirements: The BassBot… • Plays an electric bass guitar • Is autonomous • Has high quality and diverse sound • Keeps time with an internal metronome • Syncs with an iPad • Plays songs from processed MIDI files • The iPad App is plug & play • Songs can be loaded manually • iPad shows notes being played in real time • User can set a custom tempo • BassBot is affordable Design Requirements: The BassBot… • Must play a 4/4 time at 120 BPM • Can move at 0.125s/fret • Is programmed using C language • Can play MIDI song files • Can play single notes on multiple strings • Can set a custom tempo • Has sufficient force to press and pluck the string • Can be played in real time using an iPad • Cost not to exceed $700.00 Hardware Diagram Software Diagram PC iPad Bass Robot [9] Primary Microcontroller iPad/iOS Main Main Menu Menu Vdd Secondary Microcontroller/ Stepper Drivers Primary Microcontroller Power (Vdd) Play Live Tech Specs Settings Redpark Serial Cable Vdd Fret Board Solenoids Vdd Plucking Solenoids Bass Guitar Sweet Music! Stepper Motors Microprocessors Secondary Microprocessor Stepper Motor Data Sensor Data Primary Microprocessor Secondary Microprocessor Stepper Motor Data Sensor Data External Data Storage Source Secondary Microprocessor Stepper Motor Data Sensor Data [10] iPad Theory of Operation: The BassBot can either play song data from a MIDI file processed by a PC [1] or play in real time through an iPad [10] application. The PC interprets the MIDI file and sends the data serially to the Primary Microcontroller [9]. The data is then assigned to the Secondary Microcontrollers [8], each of which controls a Stepper Motor [2], two Lift Solenoids [7], and a Pluck Solenoid [3]. The Stepper Motors drive Belts [6] that are connected to Sliders [5] on Rails [4]. Once the Sliders are moved to the appropriate location above the guitar, the Lift Solenoids pull the Rail down to press the Slider on the string, as a human finger would. At the correct point in the song, the Pluck Solenoid plucks the string to play the note. In contrast, when using the iPad, the user controls the location of the sliders and the plucking, rather than the MIDI data. Secondary Microprocessor Stepper Motor Data Sensor Data * Trademarked logos of Apple, Fender, Microchip, Texas Instruments, and AlphaMicron * 3D Representations of: iPad, PC, PCBs and Guitar from Google 3D Warehouse Design Team 03: Michael Prechel (EE) - Project Leader Greg Haren (EE) – Software Manager Joshua Kuzman (EE) – Hardware Manager Louis Begue (EE) – Archivist • 2011-2012 Senior Design Capstone Project • Dr. Carletta and Dr. Lee, Faculty Advisors • Gregory A. Lewis, Senior Design Coordinator • Department of Electrical and Computer Engineering • College of Engineering • University of Akron •