Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
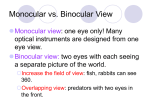
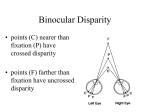
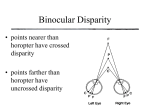
Depth Perception & 3D Vision Reza Rajimehr 3-D Perception: Inferential leap from image to environment Inverse Problem: depth ambiguity No inverse problem with 3-D retina Reducing the problem Perceiving distance Depth Perceiving 3-D objects Surface orientation: Slant and Tilt Surface layout: recovering orientation at a distance Visible surfaces Theoretical Frameworks For solving the inverse problem Ecological optics Active exploration of the environment (ecology) Information theory and computer vision Information available in the optic flow is sufficient for the perception (direct perception), no need for internal representations J.J. Gibson Adding temporal dimension to the 2-D optic array (dynamic optic array) could solve the inverse problem Texture gradient But it is insufficient to solve the problem uniquely! Heuristic assumptions Veridical perception vs. Perceptual illusions Helmholtz Probabilistic view of perception Leading to unique interpretation Solving the inverse problem Computational approaches to ecological optics Marr’s 2.5-D sketch David Marr X Modules Sources of depth information Depth cues Ocular information / Optical information Binocular information / Monocular information Static information / Dynamic information Absolute information / Relative information Quantitative information / Qualitative information Sources of depth information Depth cues Ocular information Stereoscopic information Dynamic information Pictorial information Accommodation Ocular/Monocular/Static/Absolute/ Quantitative Visual system should have access to the information about the tension of the muscles Useful for close distances Accommodation is derived by image blur so that the output of high spatial frequency channels is maximized The best depth cue in the African chameleon Convergence Ocular/Binocular/Static/Absolute/ Quantitative Useful for close distances Convergence and accommodation are not independent Stereoscopic information Optical/Binocular/Static/Relative/Q uantitative Finger Experiment Binocular disparity Direction of disparity: Crossed disparity: close Uncrossed disparity: far Magnitude of disparity: How much closer or farther Effective within 30 meters Stereoscopic information The Horopter Also fixation point has zero disparity. Stereoscopic information Diplopia (doubleness) Repeat finger experiment Stereoblindness in Strabismus, also in children with cataract in one eye Panum’s fusional area Stereograms Crossed convergence method Seeing stereograms with Stereoscope Uncrossed convergence method The correspondence problem Random Dot Stereograms Bela Julesz However, there may well be some primitive shape analysis before stereopsis. How to construct RDS? Computational Algorithms for solving the correspondence problem e.g. Marr-Poggio, 1977 taking heuristic constraints into account (e.g. surface opacity and surface continuity) Autostereograms Christopher Tyler Autostereograms Autostereograms Vertical Disparity Da Vinci Stereopsis Physiological mechanisms of binocular disparity Recording from V2 V1: Responds to zero or near-zero disparity V2: Responds to large disparities (Hubel & Wiesel, Barlow & Blakemore) Recently V3A, V4 and MT Disparity selectivity in area MT fMRI of Stereopsis Binocular Rivalry Red/Green filter glasses Convergence method Mirror devices Dynamic Information Old depth cues in evolution Motion Parallax Objects closer to you travel at faster speeds and in the opposite direction; further objects travel slower and in the same direction. Dynamic Information Optic flow (optic expansion) Dynamic Information Kinetic depth effect (KDE) Rigidity heuristic Pictorial Information Linear perspective Pictorial Information Horizon Pictorial Information Relative size Familiar size: absolute depth cue Pictorial Information Texture gradients systematic changes in the shape and size of texture elements Notice to the background of slides! Pictorial Information Partial occlusion or interposition Junctions Pictorial Information Shading Pictorial Information Cast shadows Perceiving the height of objects Pictorial Information Non-homogeneous textures, 2004 Integration/Interaction of different depth cues Pseudoscope Cue conflict between disparity and monocular depth cues Main Reference: Vision Science Palmer (Chap 5)