Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Deformation (mechanics) wikipedia , lookup
Low-energy electron diffraction wikipedia , lookup
Density of states wikipedia , lookup
Shape-memory alloy wikipedia , lookup
Condensed matter physics wikipedia , lookup
X-ray crystallography wikipedia , lookup
Geometrical frustration wikipedia , lookup
Energy applications of nanotechnology wikipedia , lookup
Electromigration wikipedia , lookup
Heat transfer physics wikipedia , lookup
Semiconductor wikipedia , lookup
Paleostress inversion wikipedia , lookup
State of matter wikipedia , lookup
Bose–Einstein condensate wikipedia , lookup
Electronic band structure wikipedia , lookup
Crystallographic defects in diamond wikipedia , lookup
Radiation damage wikipedia , lookup
Colloidal crystal wikipedia , lookup
Work hardening wikipedia , lookup
Crystal structure wikipedia , lookup
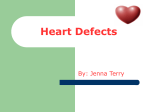
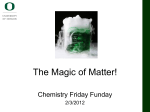
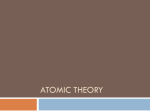
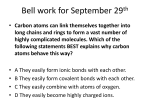
Module 10 Crystal Defects in Metals I Lecture 10 Crystal Defects in Metals I 1 NPTEL Phase II : IIT Kharagpur : Prof. R. N. Ghosh, Dept of Metallurgical and Materials Engineering || | | | Keywords: Point defect, Vacancy, Line defects, Edge & Screw dislocation, Burgers vector Introduction Metals we are familiar with are mostly crystalline. They are made of several crystals having different orientations. Their properties would depend on the properties of the individual crystals (also commonly known as grains) and the way they are arranged. In the previous module we have looked at the mechanisms of plastic deformation. We have seen that the shear stress is the main driving force for deformation. On the basis of simple assumptions the strength of an ideal crystal was estimated. It was shown to be of the order of /50 where denotes shear modulus. However the strength of real crystals is much lower (~ /1000). This is because the crystals are not perfect. There are defects in the way the atoms are arranged in metals. In this module we shall learn about the nature of such defects in metal and their effects on its deformation behavior. Defects found in metals can be classified as point defect, line defect and surface defect. Point defect As the name suggests the size of the defect is very small. It is denoted by a point having no dimension. However metal crystals are made of atoms tiny no doubt but it has a finite dimension. Point defects too have a finite dimension. In general any departure from a regular arrangement may be considered to be a defect. There can be three types of point defects in metal. These are vacancy, interstitials and substitutional impurities. Slide 1 illustrates two types of point defects. If a site is vacant there is a departure from a regular arrangement. This is called vacancy. Likewise an impurity atom may be located within the gaps between atoms. This is called an interstitial. Point defect Interstitial H F F = H-TS -TS Vacancy 2 Slide 1: Illustration on the left shows breaks in regular array of atoms. These are point defects; vacancy & interstitial. When a vacancy is introduced within the lattice there is change in the energy of the system. The graph on the right shows how at a temperature T enthalpy H increases with increase in number of vacancy. This is also associated with an increase in entropy which is a measure of disorder in arrangement of atoms. The product, TS represents unrecoverable energy. At a given temperature it is possible to estimate the number of vacancies that are likely to be present in crystals using the concept of thermodynamics. The total energy (enthalpy) of a regular array of atoms increases with introduction of vacancies. This results in disorder and a corresponding increase in the entropy of the system. Free energy F which is a measure of thermodynamic stability of a system is given NPTEL Phase II : IIT Kharagpur : Prof. R. N. Ghosh, Dept of Metallurgical and Materials Engineering || | | | by F = H‐TS. The graph in slide 1 shows a plot representing of F as a function of the number of vacancy (nv). The magnitude of nv at which F is minimum gives the expected number of vacancy at a given temperature. If n is the number of atoms, the ways (w) in which these can be arranged in nt number of ! sites is given by ! ! . The entropy of the system is therefore given by where where k is Boltzmann constant. Use Sterling approximation as shown in slide 2 the expression for entropy can be further simplified. On substitution of this in the expression for free energy (F) it is possible to estimate the number of vacancy. The derivation is given in slide 2. This is given by (1) Number of vacancy as F(Temp) Slide 2: Illustrates how using the concept of statistical mechanics configuration entropy can be estimated. This has been substituted in the expression F = H‐TS. If energy needed to create one vacancy is qv then H=qvnv. Note that the expression for F is a function of only one variable nv at a given temperature. F is the lowest at Entropy : S k ln( w) nt ! w & nt n nv ( nt nv )!nv ! ln x ! x ln x x S k (n nv ) ln n nv (n nv ) n ln n n nv ln nv nv k n ln n nv ln n n ln n nv ln nv F qv nv kT nv ln n nv ln nv dF qv kT ln n ln nv 1 qv kT ln n ln nv 0 dnv q nv n exp v kT 0 . This gives an expression for the number of vacancy at a given temperature. Apart from vacancy the presence of impurity or atoms of another element can also be considered as point defect. This may occupy either one the gaps between atoms called interstitial sites or replace or substitute one of the atoms of the parent metal (matrix). This is illustrated in slide 3. Impurities / solid solution: point defect Substitutional solid solution Pure metal is soft addition of alloy element makes it hard: Sterling silver (AgCu) Factors determining solubility: atomic size (<15%), crystal structure, valence & electro-negativity. Slide 3: Illustrates how atoms of a second element (shown with different color) can displace atoms of the matrix. Presence of dissimilar atom in a regular array of similar atoms can be taken as point defects. If these are intentionally added this is known as solid solution. Pure metals are soft and ductile. Addition of second element makes is hard & strong. The mixture of atoms as shown here is known as substitutional solid solution. Example: Sterling silver an alloy of AgCu. 3 Slide 3 shows how by substitution of a few atoms of the matrix by atoms of a different element a new alloy can be obtained. This is known as substitutional solid solution. The atoms of different elements have different sizes and electronic configuration. The extent to which atoms of a second element can NPTEL Phase II : IIT Kharagpur : Prof. R. N. Ghosh, Dept of Metallurgical and Materials Engineering || | | | dissolve in the matrix depends on how different they are. The solubility of one metal in another is governed by a set of rules introduced by Hume Rothery. Two metals can have unlimited solubility if their atomic diameters do not differ by more than 15%, they have similar crystal structure, valence & electro‐ negativity. When an atom is substituted by another of different dimension, the lattice structure surrounding it gets disturbed. In other words there will be an elastic strain field around it. This has profound effect on the properties of the metal. Increase in its strength is one of these. Interstitial solid solution: point defect C: atomic radius = 0.075 nm Radii of interstitial site iron: bcc 0.036 nm iron: fcc: 0.053 nm Size difference results in large lattice strain (distortion). Hence it has limited solubility. Atomic packing density in fcc(0.74) > bcc(0.68) yet fcc has higher solubility. Why? Slide 4: If the diameter of the impurity atom is very small it may occupy the gaps between the regular arrays of matrix atoms. These gaps are known as the interstitial sites and the resulting alloy is known as interstitial solid solution. This is illustrated in this slide. Large circles represent position of iron atoms and the small red circles denote carbon atoms. Note the dimensions of atomic radii of carbon atom and the radii of the interstitial gaps. This results in large lattice strain. If the size of impurity atom is small it can occupy the gaps between atoms as illustrated in slide 4. Solid solution of carbon in iron is an excellent example. Iron can exist in two different crystalline forms. They are austenite stable at higher temperatures having fcc structure and ferrite that is stable at room temperature having bcc structure. The former is more closely packed. Its atomic packing density is higher. Yet the dimension of interstitial sites in fcc is larger than that of bcc. This is why the solubility of carbon in fcc is higher than that in bcc. The radius of carbon atom is significantly higher than that of the interstitial gaps (see slide 4). This results in large lattice strain and a corresponding increase in its strength. The magnitude of the strain field in the case of ferrite is likely to be more than that in austenite because of larger difference between the size of the gap and the size of the atom. As a result the effect of strengthening is more in bcc ferrite than that in fcc austenite. We shall learn more about it in subsequent lectures. 4 The presence of atoms of another element in the lattice affects the properties of metals. Sometimes it is beneficial and sometimes it is harmful. For example increase in strength could be desirable for metals used for load bearing applications. In such cases the presence of second element may not be considered as point defects. However if the metal is to be used as electrical conductor presence of second element is undesirable as it has an adverse effect on conductivity. In such cases it is taken as an impurity or point defect. Metals we use do not exist in nature in elemental form. These are extracted from minerals (oxides or sulfides). During the process several unwanted elements may also get extracted and be present in the metal. The primary extraction process is the main source of impurity atoms. Their removal can sometimes be an expensive and formidable task. However this is beyond the scope of this course. As against this it is worth looking at what are the other sources of point defects (vacancy in NPTEL Phase II : IIT Kharagpur : Prof. R. N. Ghosh, Dept of Metallurgical and Materials Engineering || | | | particular) in metals. This is illustrated in slide 5. Apart from thermal activation vacancies could develop within metals due to irradiation. There are two distinct types of such defects that might form. Formation of Schottky defect is associated with decrease in density whereas there is no change in density as a result of Frenkel defect (see slide 5 & note that volume increases in case of Schottky defect). Slide 5: Thermal activation is a major source of vacancy in metals. Equation 1 describes the relation between the number of vacancy and temperature. Apart from this vacancy may develop due to irradiation. When high energy beams of electrons, ions, neutrons or x‐rays strike metals, atoms do get displaced from its regular positions. When it moves to the surface it leaves a vacant site. This is called Schottky defect. If it is pushed to an interstitial site the vacancy generated is called Frenkel defect. In this case volume remains same. Origin of vacancy Thermal activation Irradiation ( electron, ions, neutrons, x-ray) Schottky defect Density decreases Frenkel defect Density: no change Vacancy in ionic crystal: Formation of vacancy in ionic crystal adds another degree of complications. This is associated with stoichiometry. This is illustrated in slide 6. Sodium Chloride represents a case of stoichiometric crystal whereas that of Titanium di‐oxide is a non‐stoichiometric crystal. This affects the properties of such crystals. See slide 6 for details. Vacancy in ionic crystal Slide 6: Illustrates the effect of vacancies in two types of ionic solids. In NaCl there is one each of Na (white) & Cl (red) sites are vacant. It is neutral. In TiO2 only one site for oxygen (red) is vacant. Fraction of vacant oxygen site is denoted by x. There is a change in its chemical composition. This is responsible for the difference in the properties of the two types of titanium oxides. NaCl TiO2-x Stoichiometric Crystal: NaCl : electrically neutral Non-stoichiometric Crystal: TiO2-x: no longer electrically neutral, electron to be associated with oxygen atom no longer fixed to that site. This make it electrically conducting. TiO2 is insulator. Its colour is yellow. TiO2-x is blue & electrical conductor. Line defect: 5 It represents a kind of a fault in the array of atoms in a crystalline solid. Assume that atoms are arranged in a perfect order all through the crystal. Draw an imaginary close wise (or anti clock wise) circuit by joining consecutive atoms as shown in fig 1. The circuit is complete. However if there is fault or a defect NPTEL Phase II : IIT Kharagpur : Prof. R. N. Ghosh, Dept of Metallurgical and Materials Engineering || | | | in the array of atoms as shown in slide 7 the circuit does not get closed. There is a gap. This type of defect is called dislocation. The additional vector b (movement step) needed to complete the circuit is known as Burger’s vector. This type of crystal defect is known as positive edge dislocation. Fig 1: The array denotes the positions of atoms in one of the planes of a crystal. This is made of several such planes arranged one after the other at regular spacing. On this plane an anti clock close wise circuit is drawn as shown. Each arm of this is made of three arrows. Note that there is no gap. In a perfect crystal wherever it is drawn there will be no gap. Compare this with one in slide 7. Line defects: Dislocation Burgers vector: b Positive edge dislocation Extra half plane lies in the upper half of slip plane. Stress field: Clockwise circuit around the defect upper half compressive Lower half tensile Line defects: Dislocation Negative edge dislocation Extra half plane lies in the lower half of slip plane. Stress field: Burgers vector: b Lower half compressive Upper half tensile 6 Slide 7: Illustrates atomic array around a line defect called edge dislocation. There is an extra plane of atoms in the top half of the array. If a clockwise circuit is drawn while looking into the plane as shown there is a gap left behind. An additional step of movement is needed to complete the circuit. This is called Burgers vector (b). Look at the atomic packing. The top half is more packed than the bottom. Atomic distance is less in the top than that in the bottom. This is a measure of lattice strain. Slide 8: Illustrates atomic array around a line defect called edge dislocation. There is an extra plane of atoms in the bottom half of the array. If a clockwise circuit is drawn while looking into the plane as shown there is a gap left behind. An additional step of movement is needed to complete the circuit. This is called Burgers vector (b). Look at the atomic packing. The top half is less packed than the top. Atomic distance is more in the top than that in the bottom. This is a measure of lattice strain. Compare the atomic arrays in slide 7 & slide 8. The extra plane of atom is in the bottom half in slide 8. Note the orientation of the arrow in red in both of these. They point in opposite directions. The defect in slide 8 is a negative edge dislocation. Note that the line perpendicular to the plane of the paper is direction of dislocation. The Burgers vector is perpendicular to dislocation line. The sketch given in fig 2 presents the physical picture of deformation. Dislocation is a line defect representing the boundary between the deformed and yet to deform parts of the slip plane. It moves in a direction perpendicular to it. In the case of edge dislocation this movement is along its Burgers vector and shear stress. NPTEL Phase II : IIT Kharagpur : Prof. R. N. Ghosh, Dept of Metallurgical and Materials Engineering || | | | N A B O C M P D F D C E A A B Fig 2: A sketch showing the way slip occurs on slip plane ABCD on application of shear stress . POCD denotes the part of the plane on which slip has taken place. The line PO is the boundary between slipped and yet to slip parts of the plane. MNOP is the extra plane of atoms. The line PO represents crystal defect called dislocation. Displacement is along the direction DP. Fig 3: A sketch showing an alternative way of deformation by slip in a crystal. The shaded region represents a plane on which slip occurs. It is denoted with two different shades. ABCD is the part where slip has already taken place. EADF is the part on which slip is yet to occur. The boundary AD represents a line defect called dislocation. Around this the atoms are arranged is a different fashion (see slide 9‐11). Direction of motion of dislocation is perpendicular to direction of the shear stress. Displacement vector (b) points along AD. Screw Dislocation Dislocation is the boundary between slipped & yet to slip part of the crystal Atom lying above slip plane Atom lying on slip plane 7 Slide 9: Sketch showing macroscopic view of slip as a screw dislocation moves on the slip plane. Beside this the way atoms are arranged in two consecutive planes one over the other is also shown. Note that atoms around the dashed line (dislocation) are arranged along a helix. Burgers vector (slip vector) can be determined by constructing a close wise circuit by joining consecutive atoms while looking along the dislocation line. This is illustrated in slide 10. NPTEL Phase II : IIT Kharagpur : Prof. R. N. Ghosh, Dept of Metallurgical and Materials Engineering || | | | Screw dislocation: Burgers vector Burgers vector is parallel to the dislocation Slide 10: Sketch shows construction of a clock wise circuit drawn by joining consecutives atoms around a screw dislocation. This is made of several steps starting from tip of the arrow marked in red; one step down, 4 steps towards left, 2 steps up followed by one step down leaving a gap. The vector needed to close the gap shown with red arrow is the Burgers vector. Note that Burgers vector of a screw dislocation is parallel to the dislocation line. Edge & screw dislocation [t1,t2,t3] [t1,t2,t3] [b1,b2,b3] [b1,b2,b3] cos t1b1 t2b2 t3b3 t t22 t32 2 1 b 2 1 b22 b32 Screw dislocation can cross slip on another slip plane passing through it. Slide 11: Illustrates glide motion of edge & screw dislocation. Glide can occur only on plane that contains both the Burgers vector and the dislocation line. Vector [t] denotes dislocation direction whereas vector [b] denotes Burgers vector. Sketch on the left represents an edge dislocation. The plane containing both [t] and [b] is unique. It is given by the cross product of the two unit vectors along t & b. In the case of a screw dislocation t & b are parallel. It can therefore glide (cross slip) on any plane passing through it. Slide 10 also gives an expression for the angle between the slip vector [b] and dislocation direction [t]. It can be used to find the nature of the dislocation. If ° it is an edge dislocation whereas if 0 it is a screw dislocation. In case it has values other than these the line defect is considered as a mixed dislocation. The screw component of such a dislocation is (b cos its edge component is (b sin ). 8 NPTEL Phase II : IIT Kharagpur : Prof. R. N. Ghosh, Dept of Metallurgical and Materials Engineering || | | | Table 1: Comparison of edge & screw dislocation Burgers vector Atomic arrangement Glide plane Point defect interaction Stress field Strain energy Edge Normal to dislocation Extra half plane Unique Strong Hydrostatic + shear More than screw Screw Parallel to dislocation Atoms arranged along a helix Multiple Weak Only shear Less than edge Summary In this module we have learnt about point defects & line defects present in metallic crystals. These are vacancy, impurity (foreign atom), and edge & screw dislocation. Such defects are always present in metals. The number of vacancy is a strong function of temperature. A relation for this has been derived. Defects in excess of this may also be produced as a result of exposure to radiation. The sites impurity atoms (if present) are likely to occupy has been discussed. The features of line defects have been discussed. The differences between edge & screw dislocations have been explained. The presence of such defects has a profound effect on the properties of metal. We shall get to know about it through subsequent modules of this course. Exercise: 1. FCC crystals have more packing density than BCC crystal yet why solubility of carbon in FCC form of iron is higher than in its BCC form? 2. What is the effect of temperature on the concentration of vacancy? 3. If the ratio of iron ions to oxygen ions is 0.994 in FeO, what fraction of Fe sites are filled with Fe3+ ions? What is the ratio of Fe3+ to O2‐ ions? 4. What are the major differences between an edge & screw dislocation? Which of these can cross slip? Answer: 1. FCC has the maximum packing density (74%). However the interstitial sites where the carbon atoms are located are larger than those in BCC structure. Packing density in BCC is relatively low (68%). However there is more number of interstitial sites for every Fe atom. The gaps are distributed amongst more number of sites. Therefore these are too small to accommodate carbon atoms. This is why solubility is low. 9 where k is Boltzmann 2. The fraction of vacant lattice sites in a crystal is given by constant, qv is the energy needed to create a vacancy and T is the temperature in degree Absolute. As the T increases too increases. NPTEL Phase II : IIT Kharagpur : Prof. R. N. Ghosh, Dept of Metallurgical and Materials Engineering || | | | 3. Ionic crystals must maintain charge neutrality. In this iron oxide fraction of vacant Fe2+ sites = 1‐0.994 = 0.006. The reason that stoichiometry is not maintained indicates that for every O2‐ vacancy there are 2 Fe3+ ions. Thus the fraction of vacant O2‐ sites = 0.003. Note that to maintain charge neutrality there could have been 0.006 vacant O2‐ sites. In that event stoichiometry would have been FeO. 4. Edge Screw Burgers vector Perpendicular to dislocation Parallel to dislocation Slip plane The plane containing both Any plane containing the Burgers vector & the dislocation dislocation Cross slip Not possible Possible Climb Can climb Cannot climb Atomic arrangements There is an extra plane of Atoms along the dislocation are around dislocation atoms above slip plane arranged in a helix like a screw 10 NPTEL Phase II : IIT Kharagpur : Prof. R. N. Ghosh, Dept of Metallurgical and Materials Engineering || | | |