Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Radio transmitter design wikipedia , lookup
Air traffic control radar beacon system wikipedia , lookup
Integrating ADC wikipedia , lookup
Power MOSFET wikipedia , lookup
Regenerative circuit wikipedia , lookup
Surge protector wikipedia , lookup
Josephson voltage standard wikipedia , lookup
Two-port network wikipedia , lookup
Wien bridge oscillator wikipedia , lookup
Operational amplifier wikipedia , lookup
Valve RF amplifier wikipedia , lookup
RLC circuit wikipedia , lookup
Resistive opto-isolator wikipedia , lookup
Index of electronics articles wikipedia , lookup
Wilson current mirror wikipedia , lookup
Voltage regulator wikipedia , lookup
Current source wikipedia , lookup
Power electronics wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Current mirror wikipedia , lookup
Opto-isolator wikipedia , lookup
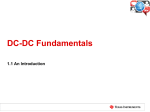
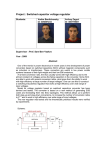
ANNUAL JOURNAL OF ELECTRONICS, 2014, ISSN 1314-0078 Stability Investigation using SPICE of BUCK DC-DC Converter Georgi Tzvetanov Kunov, Elissaveta Dimitrova Gadjeva, Maria Petkova Petkova and Tihomir Sachev Brusev Abstract – A stability investigation of the BUCK DC-DC converter with Average Current Mode Control is considered in the present paper. A Spice stability investigation equivalent circuit is composed. Using parametric analysis, zeros and poles of the current regulator transfer function are investigated. The optimal values of the compensation network elements for the current regulator are obtained. The stability of the converter operation is validated by Nyquist plot and transient analysis. Keywords – Power Electronics, BUCK DC-DC Converters, Average Current Mode Control, Stability, Spice Simulation I. INTRODUCTION when D > 0.5, peak to average current error, topology problem when inductor current is other than output current. The advantages of ACMC are: average current tracks well the current program in CCM or DCM, noise immunity is excellent even at low set point, ACMC is working whatever the topology, slope compensation is not required but loop gain at Fsw is limited to achieve stability. In the present paper the stability of work of BUCK DCDC converter with Average Current Mode Control is investigated. It is performed using the program Cadence PSpice. The simplified circuit of the converter is shown in Fig. 1. Vin + R Rcs 0 - CRe g - PWM VRe g + + + G. Kunov is with the Department of Power Electronics, Faculty of Electronic Engineering and Technologies, Technical University of Sofia, 8 Kliment Ohridski blvd., 1000 Sofia, Bulgaria, e-mail: [email protected] E. Gadjeva is with the Department of Electronics and Electronics Technologies, Faculty of Electronic Engineering and Technologies, Technical University of Sofia, 8 Kliment Ohridski blvd., 1000 Sofia, Bulgaria, e-mail: [email protected] M. Petkova is with the Department of Power Electronics, Faculty of Electronic Engineering and Technologies, Technical University of Sofia, 8 Kliment Ohridski blvd., 1000 Sofia, Bulgaria, e-mail: [email protected] T. Brusev is with the Department of Technology and Management of Communication Systems, Technical University of Sofia, 8 Kliment Ohridski blvd., 1000 Sofia, Bulgaria, e-mail: [email protected] C D Gate D rive - The basic methods of control used in the BUCK DC-DC converters are voltage mode control (VMC), peak current mode control (CMC) and average current mode control (ACMC). Their advantages and disadvantages are systematically summarized in [1,2,3]: Voltage Mode Control: The advantages are: stable modulation – less sensitive to noise, single feedback path, it can work over a wide range of duty cycles. The disadvantages are: loop gain proportional to Vin, LC double pole often drives type PID compensation, continuous current mode (CCM) and discontinuous current mode (DCM) differences – a compensation challenge, slow response to input voltage changes, current limiting must be done separately. Current Mode Control: The advantages are: power plant gain offers a single-pole roll-off, line rejection, cycle-by-cycle current limiting protection, current sharing. The disadvantages are: noise, minimum on-time, current probe (Rsense, current transformers). Peak versus Average Current Mode Control: The disadvantages of Peak CMC are: poor noise immunity (at switching on), slope compensation required Vout L Q Vs th Vre f Vsthp-p 0 Fig.1. Simplified circuit of BUCK DC-DC with ACMC In the classical theory of automated control, a closed loop system is represented by its mathematical description [4]. This approach, applied to BUCK DC-DC converter with ACMC, is illustrated in Fig. 2. The designations for the separate blocks are: WMod – transfer function of the BUCK DC-DC converter, WLCR – transfer function of the output filter, WCR – transfer function of the current regulator (a PI regulator is used), WVR – transfer function of the voltage regulator (a PID regulator is used). Applying the rules for the equivalent transformations, (Fig.2a, Fig.2b and Fig.2c), the system is reduced to a single block with equivalent transfer function We. The mathematical description of the transfer functions of the separate blocks is shown as follows [5,6]: Parallel Compensation Vre f WMod WLCR Vout WCR WVR a) Vre f WPC WLCR WVR b) Vout Vref We Vout c) Fig.2. Equivalent transformations of the system 219 ANNUAL JOURNAL OF ELECTRONICS, 2014 The transfer function of the Modulator: WMod ( s) = Vin Vsthp − p (1) - inductor current ripple: ΔIL=0.5A; - output voltage ripple: ΔVout = 0.25V; - maximum change in load current: ΔILoad-max=4A. First, the smoothing filter is designed by the following equations[6]: The transfer function of the output filter: WLCR 1 + sRC C = 1 + s ( RL + RC ) C + s 2 LC (2) where: RL – direct-current resistance (DCR) of the filter inductor, RC – electrical series resistance (ESR) of the filter capacitor. The transfer function of the PI current regulator: WCR ( s ) = s+ 1 RC 2 .CC 2 1 ⋅ RC1 .CC1 ⎛ C + CC 2 ⎞ s. ⎜ s + C1 ⎟ RC 2 .CC1 .CC 2 ⎠ ⎝ Vin − Vout Vout 1 =26.6 µH . . ΔI L Vin Fsw We choose L=33µH. L≥ C≥ 2 LΔI Load − max =267µF 2.Vout ΔVout We choose C=330 µF with ESR=25 mΩ. The calculated L and C values define the cutoff frequency: (3) FLC = ⎛ ⎞ 1 ⎞⎛ 1 ⎜s + ⎟⎜ s + ⎟ + R C R R C ( ) RV 1 + RV 3 ⎝ V 2 V 2 ⎠⎝ V1 V3 V3 ⎠ WVR ( s ) = (4) RV 1 RV 3CV 1 ⎛ CV 1 + CV 2 ⎞⎛ 1 ⎞ s⎜s + ⎟⎜ s + ⎟ RV 2CV 1CV 2 ⎠⎝ RV 3CV 3 ⎠ ⎝ The transfer function of the Parallel Compensation: WMod ( s ) 1 + WMod ( s ) .WCR ( s ) 1 2π LC = 1.5kHz and ESR zero frequency: The transfer function of the PID voltage regulator: WPC ( s ) = (5) FESR = 1 = =19.3kHz 2πC.ESR B. Compensator calculation of the PI current regulator A PI type compensator as a current regulator is shown in Fig. 3a. The location of its zero crossover frequencies is shown in Fig. 3b. The recommended values are [6]: FZ1=0.75×FLC=1.125 kHz and FP2=0.5×Fsw=125 kHz. The desired bandwidth of the system (F0=25 kHz) is chosen bigger than FESR. The equivalent transfer function: Cc1 We ( s ) = (7) WMod ( s)WLCR ( s ) = 1 + WPC ( s )WLCR ( s)WVR ( s) Rc2 Vi-cs Wlcr -40dB Fesr Flc Cc2 -20dB Rc1 Wcr -20dB -20dB - WMod ( s )WLCR ( s ) 1 + sWMod ( s ) + WMod ( s )WLCR ( s )WVR ( s ) (6) Vi-ref Vi-comp + = Fz1 We 0.75Flc a) In [7], the mathematical description of the transfer functions of the output filter and the regulators is replaced by their real circuits. This approach, combined with the SPICE simulation, simplifies the stability investigation of the system. It is applied in the present paper. II. STABILITY INVESTIGATION OF BUCK DC-DC CONVERTER Fo -20dB Fig.3. PI type compensator as a current regulator The recommended parameter value [6] of the resistor RC1 is between 1 kΩ and 5 kΩ. It is chosen RC1=3.9 kΩ. The parameter value of the resistor RC2 is calculated by the equation: RC 2 = A. Calculation of the LC filter parameters In order to perform stability investigation of the BUCK DC-DC regulator system, it is necessary to have the parameters of the mode in which it will work. The mode of operation includes the following parameters [6]: - switching frequency: Fsw=250 kHz; - input voltage: Vin=15V; - output voltage: Vout = 5V; - maximum output current: ILoad-max = 5A; b) Fp2 0.5Fsw FESR F0 Vsthp − p ⋅ R = 278kΩ (FLC )2 Vin C1 (8) We choose RC2=270 kΩ. The relationship between the parameter values of the passive components of the regulator and the poles of the compensator is given by equations [6]: 220 Fz1 = 1 2πRC 2CC 2 (9) ANNUAL JOURNAL OF ELECTRONICS, 2014 Am od GAIN = 3 Rcs DS Cc1 {Cc1v} 1u Rdcr 10m L 33uH C 330uF R 1 + - 2πRC 2 CC1 By the above equations standard values are calculated and chosen: CC2=4.7 pF and CC1=680 pF. (Fig. 5), the values of the frequency FZ1 and FP2 are obtained, which ensure the system stability. + - (10) V 1 FP 2 = C. Compensator calculation of the PID voltage regulator Rc2 {Rc2v} Ki GAIN = 1e 6 Ifb 0 Out Cc2 {Cc2v} A PID type compensator as voltage regulator is shown in Fig. 4a. The location of its zero crossover frequencies is shown in Fig. 4b. The recommended values are [6]: - UCR Rc1 OUT V + Cv1 100p V Cv2 10n Rv2 13k Cv3 27n Rv3 47 Rv1 The desired bandwidth of the system (F0=15 kHz) is chosen less than FESR. UVR 3.9k - + Re f 0 PARAM ET ERS: V s thpp = 5 Rc1 = 3.9e 3 Vin = 15 Flcr = 1.5e 3 Fs w = 250e 3 Fe s r = 19.3e 3 pi = 3.1415926 n = 0.75 m = 0.5 Fz1 = {n*Flcr} Fp2 = {m *Fs w } Fo = {1.25*Fe s r} Rc2v = {(Fe s r*Fo*V s thpp*Rc1)/(Flcr*Flcr*Vin)} V 1 5Vac OUT 0 V 3.9k Ire f FZ1=0.75×FLC=1.125 kHz; FZ2=FLC=1.5 kHz; FP2=FESR=19.3 kHz and FP3=0.5×Fsw=125 kHz. Re s r 25m 0 Cc2v = {1/(2*pi*Fz1*Rc2v)} Cc1v = {1/(2*pi*Fp2*Rc2v)} V Cv1 Rv3 Vout Cv3 Rv2 Wlcr -40dB Flc Fesr Cv2 Wvr -20dB Rv1 - VReg Vv-comp + Vv-ref Fig. 5. Equivalent circuit for stability investigation -20dB A recalculation of the capacitor values CC2 and CC1 is performed in the compensation network of the PI regulator and standard values are chosen: (CC2 = 390 nF and CC1 = 2.7 nF). It is seen from the Nyquist plot in Fig. 6b that the system is stable. -20dB Fz2 Fp2 Fp3 Fz1 We 0.75Flc -20dB 0.5Fsw b) a) Fo -40dB Fig.4. PID type compensator as a voltage regulator The recommended parameter value of the resistor RV1 is between 1 kΩ and 5 kΩ. We choose RV1=3.9 kΩ. The parameter value of the resistor RV2 is calculated by the equation: RV 2 = F0 Vsthp− p ⋅ RV 1 = 13kΩ FLC Vin (11) We choose RV2=13 kΩ. The relationship between the parameter values of the passive components of the regulator and the poles of the compensator is given by equations: 1 FZ 1 = 2πRV 1CV 1 FZ 2 = 1 2πCV 3 ( RV 1 + RV 3 ) FP 2 = FP 3 = 1 2πCV 3 RV 3 1 . 2πRV 1CV 2 (12) (13) a) FZ1=0.75FLC; FP1=0.5FSW b) FZ1=0.001FLC; FP1=0.001FSW Fig.6. Nyquist plot of the system Е. Magnitude vs. frequency responses of the basic blocks of the converter The Magnitude-vs. frequency responses of the building blocks of the BUCK DC-DC converter with Average Current Mode Control are obtained using the simulation circuit shown in Fig. 7. (14) (15) By the equations (11) to (15) standard value are calculated and chosen for CV1=100 pF; CV2=10 nF; CV3=27 nF; RV3=47 Ω. D. Stability investigation equivalent circuit The equivalent circuit for stability investigation is shown in Fig. 5. The Nyquist plot is shown in Fig. 6a with calculated parameters in correspondence with the conditions in Chapter II.A and II.B. It is seen that the system is unstable (Fig. 6a). Using Parametric Analysis 221 Fig.7. Simulation circuit for obtaining the magnitude-vs. frequency responses of the building blocks ANNUAL JOURNAL OF ELECTRONICS, 2014 Eg E Vg1 + - Qbuck IRFZ44 Rg 10 + - SWg GAIN = 1 TOPEN = 5us TTR AN = 0.1u 0 L Vin Vdc 15Vdc Cd Dbuck 2n SW1 TC LOSE = 1.5ms 33uH Vout V I V C Dbreak 330uF Rout Rch 3.33 Rd 0.025 HIcs H +6V 0 TOPEN = SW2 1.9ms + - +15V 1.43 Re s r 39 Vcc Vcr 15Vdc 8Vdc GAIN = 1 0 Cc1 2.7nF Cv1 100pF 0 Cc2 Rc2 390nF Cv2 270k Rv2 10nF C3 100k Rv3 27nF 47 LM7171 6 - 2 + Ic_fb R1 10k 5 OUT V- Vg1 V+ U3 7 +15V 3 R2 10k 4 0 1 V 2 5 V 3 +6V - Rv1 4 3.9k Vout_fb Vcc out gnd Ic_re f + U1 V LMH6657 0 R fb 3.9k V 3 0 2 Vout_re f V 0 0 3.9k 1 + U2 LMH 6657 V Rc1 4 Vcc out gnd Vsth V1 = 1V V2 = 6V TR = 3.8us TF = 0.1us TD = 0 PW = 0.1us PER = 4us +6V - Vdc 0 V1 = 0V TR = 200us TD = 0 PW = 7ms V2 = 2.5V TF = 2us PER = 8ms Fig. 9. The full electrical circuit of the BUCK DC-DC converter with Average CMC, corresponding to a stable mode of operation Fig.8. Simulation results for the magnitude-vs. frequency responses The circuit of the PI regulator, corresponding to unstable mode of operation, is simulated by Bl1(n = 0.75 and m = 0.5). The circuit of the PI regulator, corresponding to stable mode of operation, is simulated by Bl2(n = 0.001 and m = 0.001). The simulation results are shown in Fig. 8. It is seen that a stable mode of operation is achieved, placing the zero and the pole of the PI regulator (FZ1 and FP2) in the low frequency range. III. TRANSIENT STABILITY INVESTIGATION OF BUCK DC-DC CONVERTER The full electrical circuit of the BUCK DC-DC converter with Average Current Mode Control is shown in Fig. 9, using the obtained parameter values of the PI regulator, which ensure a stable mode of operation. The simulation results in the time domain are shown in Fig. 10. The circuit is simulated for two stepping variations of the load current (from 1.5А to 5А and from 5А to 1.5А). The simulation results for the transient responses confirm the system stability. IV. CONCLUSION Stability of the BUCK DC-DC converter with Average Current Mode Control has been investigated. The optimal values of the compensation network elements for the current regulator are obtained corresponding to a stable system. A parametric analysis in the frequency domain using Cadence PSpice simulator is applied for this purpose. Stability investigation is performed using frequency criterion (Nyquist plot), as well as using simulation in the time domain. The obtained simulation results confirm the validity of the proposed procedure for optimal value determination of the compensation network elements for the current regulator. Fig.10. Simulation results in the time domain REFERENCES [1] http://www.montefiore.ulg.ac.be/~geuzaine/ELEC0055/ [2] P.Cooke. Modeling average current control, Proc. APEC, New Orleans, 2000, Vol.1, pp. 256-262 [3] L. Dixon. Average Current Mode Control of Switching Power Supplies, www.ti.com/lit/an/slua079/slua079.pdf [4] K. Ishtev. Theory of automatic control, Technical University of Sofia, 2007. www.ti.com/lit/an/slva274a/slva274a.pdf [5] D. Mattingly. Designing Stable Compensation Networks for Single Phase Voltage Mode Buck Regulators, Intersil, Technical Brief, December 2003, TD 417.1 www.intersil.com/data/tb/tb417.pdf [6] A. M. Rahimi, P. Parto, P. Asadi. Compensator Design Procedure for Buck Converter with Voltage-Mode ErrorAmplifier, International Rectifier, Application Note AN-1162 www.irf.com/technical-info/.../an-1162.pdf [7] R. Sheehan, Understanding and Applying Current Mode Theory, Power Electronics Technology Exhibition and Conference, October 30 – November 1, 2007, Dallas http://www.ti.com/lit/an/snva555/snva555.pdf 222