Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
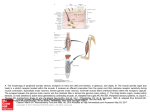
eBooks Proprioception: The Forgotten Sixth Sense Chapter: Proprioceptive Training in Neurological Diseases Edited by: Defne Kaya Published Date: July, 2015 Published by OMICS Group eBooks 731 Gull Ave, Foster City, CA 94404, USA Copyright © 2015 OMICS Group All book chapters are Open Access distributed under the Creative Commons Attribution 3.0 license, which allows users to download, copy and build upon published articles even for commercial purposes, as long as the author and publisher are properly credited, which ensures maximum dissemination and a wider impact of our publications. However, users who aim to disseminate and distribute copies of this book as a whole must not seek monetary compensation for such service (excluded OMICS Group representatives and agreed collaborations). After this work has been published by OMICS Group, authors have the right to republish it, in whole or part, in any publication of which they are the author, and to make other personal use of the work. Any republication, referencing or personal use of the work must explicitly identify the original source. Notice: Statements and opinions expressed in the book are those of the individual contributors and not necessarily those of the editors or publisher. No responsibility is accepted for the accuracy of information contained in the published chapters. The publisher assumes no responsibility for any damage or injury to persons or property arising out of the use of any materials, instructions, methods or ideas contained in the book. A free online edition of this book is available at www.esciencecentral.org/ebooks Additional hard copies can be obtained from orders @ www.esciencecentral.org/ebooks I eBooks Proprioceptive Training in Neurological Diseases Cevher Savcun Demirci1, Fatma Avcu2, Ender Ayvat2, Muhammed Kılınç2 and Sibel Aksu Yıldırım2* Kırıkkale University Faculty of Health Sciences, Department of Physiotherapy and Rehabilitation, Turkey 1 Hacettepe University Faculty of Health Sciences, Department of Physiotherapy and Rehabilitation, Turkey 2 *Corresponding author: Sibel Aksu Yıldırım, Pt. PhD, Professor, Hacettepe University Faculty of Health Sciences, Department of Physiotherapy and Rehabilitation, Turkey, E-mail: [email protected] Abstract The most important objective of neurological rehabilitation following nervous system injury is the restoration of sensory-motor functions. A healthy sensory-motor function requires normal flow of proprioceptive information from the periphery. Meanwhile processing of proprioceptive signals can be hindered as in cerebral injury or stroke or neurodegenerative diseases such as Parkinson’s disease. This is a significant obstacle for neurorehabilitation. Clinically, proprioception is a very important factor for assessment and treatment of the patients because these patients use proprioceptive information insufficiently and proprioceptive sensory deficit prevents learning or re-learning of basic functions such as postural control, protective reflexes, joint movements, balance, gait and fine motor skills of the hand. Therefore, re-establishment of neural connections and more specifically maintenance of these connections in proprioceptive-motor processes are needed for restoration of motor control [1,2]. So evaluation and treatment of proprioception in neurological disorders is very important and should not be ignored. Keywords: Approaches Exercise; Multisensory Treatment; Proprioception Training; Sensory-Motor Proprioceptive Training Methods Proprioceptive System Proprioception is the sense that allows us to perceive the position and movement of the body in space. It contributes to all complex neuromuscular processes underlying the balance and postural control. It is involved in all static and dynamic activities, helps the body to be stable and oriented and contributes to all complex neuromuscular processes underlying balance, gait and postural control [3]. Acting as a data system, it has a direct effect on program generators at the spinal level. Sense of proprioception, which has a critical role in motor learning and ability to adapt to new or changing environment, has extensive 1 connections within the cortical-cerebellar conduction network. Proprioceptive input when it reaches the supraspinal level from the periphery, in order to modulate more complex processes of motor control, synapse with cerebellar, brain stem, subcortical and cortical areas. When the stimulus reaches the reflex level, a rapid muscle response is elicited via the reflex arch appropriate for the timing of the neuromuscular control. At higher levels, afferent input synapse with the visual and vestibular inputs to facilitate automatic postural control and locomotion. Proprioceptive data can influence the Central Nervous System (CNS) functions at different levels and alter intensity and importance of the information at all levels via many mechanisms. Proprioceptors are found in three peripheral anatomical localizations: Muscle spindles, tendons and joints [4-7]. Muscle spindle Muscle spindle is the most important receptor for the control of the movement. They are involved in the maintenance of the modulation of the alpha motor neurons that innervate extrafusal muscle fibers. This role is performed via the simultaneous modulation of gamma and alpha motor neurons during functional activities. Afferents of the muscle spindle facilitates the agonists and their synergists, while, at the same time inhibiting polysynaptically the antagonists and their synergists. The information is conveyed to the ipsilateral cerebellum and contralateral parietal lobe concurrently. In conclusion, muscle spindle plays a part in the peripheral feed-back mechanism that conducts the stimuli periphery to various regions of the CNS. These centers regulate the continuum of the neuro-excitation at the levels of the brain stem and the spinal cord. Gamma innervation regulates the degree of internal tension in the non-contractile part of the muscle spindle. Internal tension can be altered by the external effect of gravity, positioning and therapeutic processes, thereby motor responses can be modulated. Main afferents of the spindle are length receptors and they detect the changes in length that occur in the non-contractile part of the spindle. The change in length occurs as a result of positioning, stretching or mechanical external force such as internal mechanism caused by intrafusal muscle contraction. Spinal motor generators and supraspinal activity affect the alpha and gamma motor neurons to modify muscle contraction patterns. Due to this inherent internal sensitivity, it changes its length when a therapeutic technique is applied and receptors sensitive to length start firing. Another group of receptors respond to the speed of the tension rather than the length. Techniques such as rapid stretching, vibration or taping cause rapid tension effect on the spindle with a resultant stimulation of the receptor. As a therapeutic approach, afferent input of the muscle spindle can permanently alter the existing programs by affecting the cerebellum and basal ganglia. Even if neural plasticity is possible in the spinal cord, the effect of muscle spindle on the spinal nervous system is short lived, with very small long-term effects. Cerebellum is effective on the basal ganglia/frontal lobe brain stem and they have the potential to alter existing motor patterns by modulating interneurons in the spinal pattern generators. Various therapeutic approaches that adopt sensory stimulation of muscle spindle Positioning: It is based on reducing the effects of gravity on alpha motor neuron and consequently inhibiting muscle tone. Relaxation achieved by this technique is not permanent and unless motor learning or central program adaptation is actualized it is reversible. Hence, modifications in a number of systems are required for this treatment to be effective. The effects of muscle tone on autogenic inhibition, reciprocal innervation, labyrinthic or somatosensory effects and cerebellar regulation can be benefitted. It should be kept in mind that active participation of the patient is required for the changes in the CNS to occur and motor learning to take place [8]. 2 Manuel techniques Resistance: It is generally used to stimulate intrafusal and extrafusal muscle contraction. Resistance can be applied mechanically or manually, using the body weight or the effect of gravity, allowing smooth and coordinated movement. More motor units fire when resistance is applied against a movement. Resistance activates muscle spindle (Ia and II endings) and golgi tendon organ (Ib ending) and makes them sensitive to changes in velocity and length. Input to the spinal neurons and upper centers trigger a response in the form of facilitation or increase in muscle contractions. While agonist and synergistic muscles are facilitated antagonist muscles are inhibited. Extrafusal muscle fibers undergo hypertrophy and kinesthetic awareness increase [9]. Resistance applied for isometric contraction is more stimulating than that applied for isotonic contraction. When the isometric resistance is increased or maintained, more motor units participate in the contraction and the force of the extrafusal contraction is enhanced. Eccentric isometric contraction has been defined as the elongation of muscle fiber with resistance. Eccentric contraction provides faster increase in strength though all types of contractions increase strength. Resistance is an important clinical treatment and its use is recommended in treatment programs [8] (Figure 1). Figure 1: Application of resistance. Tapping: Tapping stimulates intrafusal and extrafusal muscle fibers by giving the muscle spindle a quick stretch. Physiotherapists use three different types of “tapping”. Tapping on the tendon is not exactly a discriminative stimulus. Clinicians use this technique to examine the stretch sensitivity of a muscle (patellar reflex). Normal response is a brisk muscle contraction. Because of the magnitude of the stimulus and its direct effect on alpha motor neuron, it is not possible to teach a patient how to control or grade muscle contraction effectively. Tapping the muscle belly elicits a lower intensity response and is more satisfactory. It can be used, for instance, to maintain the weight carrying position. “Reverse tapping” is a less frequently employed technique but can be used. The limb is positioned so that the gravity promotes stretch rather than the physiotherapist exerting a manual or the patient exerting an active stretch. When the muscle responds, the therapist taps lightly or moves the limb passively to the position where the muscle is shortened. For instance, patient bears weight on extended elbow and tries to fully extend the elbow while the therapist taps the triceps muscle. In the meantime gravity rapidly stretches the triceps muscle. Timing is critical in this technique. If not applied just on time, for instance, if the elbow is tapped towards extension, when the flexor muscles’ motor neurons are sensitive, then the flexor muscles contract. If the therapist taps following stretch to the extensor muscles, then the flexor muscles would be dampened and motor response of the extensor muscles would increase [8-10]. 3 Stretch-pressure: The target area of this technique is its belly. Since this technique can increase the muscle tone, it is not used in hypertonic muscles. It is applied to an antagonist muscle to inhibit hypertonic muscle. Generally, it is not a rapid stimulus and the stimulus is maintained for 5-10 seconds [8]. Stretch-release: In this technique, fingers are placed over the belly of large muscles and the fingers are then abducted to stretch the skin and underlying muscle. The stretch is performed firmly so that the soft tissue will deform temporarily. By this way, the cutaneous receptors and Ia afferent fibers would be stimulated, which results in facilitation of the target muscle [8]. Manual pressure: Manuel pressure has a facilitatory effect when applied as a brisk stretch or friction-like massage. In conjunction with volitional effort, it contributes to motor learning [8]. Mechanical stimulations Electrical stimulation: It is a technique used to achieve muscle contraction by eliciting action potential in the motor branches of peripheral nerves [11]. Since electrical stimulation is a method of inducing facilitation of muscle spindle, it is used as an adjunct to treatment. Studies showed that combination of electrical stimulation with active movement was more effective in improving function [12]. Studies especially in stroke patients highlighted the beneficial effects of functional electrical stimulation on gait [13-16]. It is believed by some authors that utilization of electrical stimulation as a sensory stimulus would be less effective due to the absence of sensory receptors for electrical current and absence of somatosensory cortical representation of such a stimulus [8]. Vibration: Vibration applied to the tendon stimulates the primary ending of the muscle spindle, elicits reflex muscle contractions that would help improve muscle functions [17]. The effects of vibration on muscle spindle depend on the vibration parameters. High frequency vibration (100-300 Hz) applied to the muscle or tendon elicits a reflex response termed tonic vibratory reaction. Tension within the muscle increases slowly and progressively for 30-60 seconds and makes a plateau throughout the duration of the stimulus. The effect of vibration can be increased by combining it with resistance, positioning and visually directed movement [8]. Some side effects of vibration have been highlighted. Frequencies over 200 Hz can cause lesions on the skin. Discomfort and sometimes pain have been reported with vibrations over 150 Hz. Therefore, it is recommended that the frequency be kept between 100-125 Hz. Many battery-operated hand vibrators have a frequency in the range 50-90 Hz. A frequency less than 75 Hz can cause inhibitory effect in a normal muscle. Another type of application, namely whole body application involves delivering vibrations to a large area. While standing on a platform vibrating at a frequency between 1-50 Hz, vibrations from the sole of the foot stimulate the muscles and tendons as well as joint proprioceptors [18]. Johansson et al., found a strong relation between stimulation of the joint mechanoreceptors and stimulation of gamma efferents (spindle becoming responsive), resulting in stiffness in muscles and joint stability [19]. This is important in understanding how whole body vibration improves proprioception. A study by El-Tamawy et al., showed that vibration, when applied while walking on the treadmill, had positive effects on angular displacement in the joints and spatio-temporal parameters of gait in Parkinson’s disease patients. External stimuli contribute to the sensorymotor integration that requires processing and organization of proprioception. They cause improvement in cortico-spinal excitability and increase in the tonic activity of the plantar muscles [20]. Ghoseiri et al., showed that vibration applied to the lumbar region in sync with stepping increased walking velocity and stability in Parkinson’s disease patients [21]. 4 Müller et al., argued that muscle vibration applied on the left forearm improved slowed cognitive processes due to traumatic cerebral injury [22]. Karnath et al., demonstrated that vibration applied to the neck decreased contralateral neglect in patients with right-sided hemispheric lesion [23]. The study by Avanzino et al., on the other hand, showed that maintaining the dynamic proprioceptive inputs by muscle vibration in an immobilized arm could prevent hemispheric unbalance due to short-term limb disuse [24]. Tendon organ Golgi tendon organ is a special kind of receptor localized at the proximal and distal musculotendinous junctions. Together with muscle spindles, it plays a key role in proprioception [25,26]. The most important role of Golgi tendon organ is to monitor the muscle stretch as a result of contraction of the extrafusal muscle fibers. Research showed that the tendon organ is very sensitive to stretch and, working together with muscle spindle, it adjusts the muscle tone and adaptability of the extrafusal muscle fiber by conducting the demands of environmental circumstances to higher centers. The basic difference between Golgi tendon organ and muscle spindle is that muscle spindle is sensitive to length while Golgi tendon organ is sensitive to force and speed. Their effects at the spinal level are the opposite. Muscle spindle regulates reciprocal inhibition whereas golgi tendon organ is involved in autogenic inhibition [26,27]. Inhibitory pressure: Is stimulation in the form of a long-term pressure on the tendons. It activates muscle receptors and tactile receptors and elicits an inhibitory response. Pressure can be applied manually or using body weight, mechanically or using inhibitory splints. It has been argued that deep pressure exerts its effects by stimulating rapidly adapting Pacinian corpuscles. There are studies demonstrated that these receptors are involved in regulation of vasomotor reflexes, modulation of pain and that they are related to the inhibitory effects of other sensory systems in the CNS [28-30]. Combination of pressure (manual), environmental needs (low) and parasympathetic activity (slow, easy breathing) indicates that many systems should work side-by-side in order to elucidate the best motor response. Real world requires one, whether under stress or not, to give a normal response to various environmental conditions. Hence, a therapist should include as many different environmental conditions as possible and change the stimuli frequently to enhance the adaptation capacity of the patient [8]. Joint Joints yields information on body position and movements to the cerebellum, cortical sensory areas and motor nuclei [31]. Complex joints contain more receptors and produce a signal even with small angulations. Joint mechanoreceptors conduct the afferent information they receive to the anterior horn cells for a rapid control of the periarticular muscles. On the other hand, the information is transferred to the supraspinal centers via spinocerebellar and dorsolateral tracts. Proprioceptive and somatosensory integration of the movement is undertaken in the cerebellum and unconscious control is achieved while the conscious control is handled by the cortex [32]. Four major joint receptors have been defined in the literature. Anatomically, these receptors are localized on the joint capsule and ligaments [5,33]. Joint receptors have different thresholds for angulation and velocity of the joint movements. They not only play a role in the origination of the information but also in the cortical sensory mapping within the somatosensory area 3a. These stimuli project onto various cortical fields related to body perception and motor control of the body. On the other hand, if there is no overlap between sensory information and targeted movement, then the motor movement is modified or the plan is changed to achieve the aim [34]. 5 Joint receptors are quite useful in various treatment techniques and exert very powerful effects on motor systems [8]. Combined proprioceptive input techniques Thanks to their combined effects, these techniques are used for multiple data input. Some of these combined approaches include Jamming; ballistic movements; total body positioning; PNF patterns; stretching; range; rotation and shaking; postexitatory inhibition; heavy work patterns; Feldenkrais and manual therapy [8]. Traction: The joint receptors are stimulated by manually distracting the joint surfaces. Slow and gradual traction can be used to increase mobility, relieve muscle spasms and reduce pain [9]. Approximation: The joint receptors are stimulated by manual or mechanical compression of the joint surfaces. It increases joint awareness, facilitates postural extensor system and helps to stabilize joints. It is usually applied during extensor patterns and by adding pressure down the limb [9]. Moreover, jamming, when used as an approximation technique, is a procedure in which weight is applied to the wrist or ankle of the patient. It can be done by the patient him/herself and it activates co-contraction of the muscles around the joint and inhibits spasticity. This tecnique can be combined with functional training to support functional outcomes and achieve better somatosensory response [8]. Ballistic movements: These are the movements performed with maximal velocity and acceleration. It is characterized by high firing ratio, short contraction time and high force generation. Ballistic movements or pendular exercises are effective due to their combined proprioceptive effects and cause specific neuromuscular adaptations. Ballistic movements are a part of the pattern generators in the spinal system and are more complex than reflex responses. Supraspinal influence over programmed activity has a role to enhance the efficacy of this treatment [8,35,36]. Proprioceptive neuromuscular facilitation pattern: Based on the normal development of human movements, this method is used with the aim of improving motor performance. It facilitates neuromuscular responses by stimulating the proprioceptors. This approach is widely used in many orthopedic or neurological diseases but research on this method has focused largely on its efficiency in lower motor neuron lesions. This method is helpful in the rehabilitation of patients with spasticity or paresis since it facilitates muscle lengthening by increasing the inhibitory mechanisms and increases muscle strength by facilitating the excitatory mechanisms [37-39] (Figures 2 and 3). Figure 2: PNF application in flexor pattern. 6 Figure 3: PNF application in extansor pattern. Rood: This method involves the relations between somatic, autonomic and psychological factors and the roles of these relations on motor behavior. The treatment aims to improve normal patterns by activating the movement and postural responses. Movement is accomplished from the most basic to the most complex patterns. Sensory stimulus is the fundamental approach; techniques such as tactile stimuli with brushing and ice, mild stretching of the muscle and compression on the joints should be used [40]. Feldenkrais: It is an approach, which argues that increase in the kinesthetic and proprioceptive awareness of functional movements will result in increased function, reduced pain, comfort in movements and satisfaction. Feldenkrais concept involves stretching of the relaxed muscle, distraction and compression of the joint for sensory awareness. Both techniques are combinations of proprioceptive techniques. It is applied to one body part and then moved to other body segments. Body schema awareness is enhanced by this technique. By observing the technique, volitional control can be achieved by the patients [41]. Manual therapy: These approaches can be utilized whenever a pathological condition affects joint mobility and functional problems ensue. Immobility in the joints reduces the adaptation potential of the peripheral nerve due to changes in nerve bed. Problems in the neural elasticity eventually affect the functions of the connective tissue. Consequently, the control of motor system over musculoskeletal component is altered [42,43]. Even for this reason alone, manual techniques constitute an important option. Patients with functional restriction due to pain usually present to the physiotherapist for musculoskeletal assessment. A subjective and observatory assessment should be carried out, physical assessment should be structured in such a way that somatic and radicular symptoms could be differentiated and the involvement of the peripheral nervous system could be established [43]. Increased muscle tone in peripheral injury is usually believed to be a protective mechanism of the tissue against inflammation. It is possible that this increase in muscle tone is a result of reduced presynaptic activity of afferents of the flexor reflex arch through supraspinal mechanisms. The same mechanisms can trigger CNS injury as well. The difference between an orthopedic and neurological case is the triggering of CNS injury. Following central lesions, motor generators are usually not spared and this results in hypotonia. Hypotonia, in turn, results in peripheral instability, tension in the peripheral tissues and potential peripheral injury. Both in orthopedic and neurological cases, peripheral injury appear first, followed by peripheral instability due to hypotonia. The response of CNS to instability is similar: muscle tone increases when presynaptic inhibition is suppressed. As a result of suppressed presynaptic inhibition on afferent input, activity of the spinal generator increases. In an isolated musculoskeletal problem in the presence of 7 intact CNS, the motor system has the capacity to adapt, can control the spinal generators and increased muscle tone directly related to the problem can be isolated. In cases with CNS involvement flexibility of the motor system is lost, the control over the central system generators disappear and synergistic patterns with high tone can develop. In both cases, the peripheral system should be assessed and treatment should be given, if necessary. Tension tests can yield inappropriate responses in the neural tissues. In order to prevent inducing further pain, movements of the neural tissues are limited and muscle tone increases secondary to painful provocation of nociceptors of the sensitized neural tissue. Pain further increases muscle tone and hinders passive movement [44]. Painless movement indicates the sensitivity of CNS to large-caliber myelinated fibers and their functions. Restriction of the joint movements that could cause pain beyond the threshold, nociceptors, muscles and joints play roles in the attention and protection of the CNS. Inflammation of the neural tissues renders the nociceptors hypersensitive [43]. Treatment should be modified according to the degree of immobility, intensity of pain and the area of irritability. Taking the tension in the peripheral nervous system into account, not only the joints but also the affected neural dynamics should be targeted. Motor responses can be modulated by the effects of manual therapeutic approaches on proprioceptive system [30]. Exteroceptive/Cutaneal System Somatosensory system is generally divided into 2 groups: The first system is phylogenetically older and non-specific while the second system is newer and functionspecific. To date, systems are classified as lemniscal and spinothalamic systems. Spinothalamic system: Conducts predominantly protective stimuli. Lemniscal system: Conducts the discriminative properties of somatic senses, including exteroceptive and proprioceptive information. Understanding the anatomy and physiology of the sensory systems is fundamental in formulating treatment options. Afferent information reach the lemniscal system via a peripheral or cranial nerve. These interneurons are large-calibre. Therefore signals are conducted very fast. The most striking feature of this system is somatotopic organization. There is a spatial topographic representation in the ascending fibers in the dorsal column and a synaptic organization in the thalamus. This high-order organization enables differentiation of specific proprioception and tactile senses. Lemniscal system conducts kinesthetic information such as conscious proprioception, touch, pressure, localization, quality and spatial attributes of a mechanical stimulus [5,45,46]. The ascending stimuli of the spinothalamic system either terminate in the reticular formation or establish collateral connections. These fibers ascend to synapse with the neurons of the non-specific (medial) thalamus, after which are distributed to almost every region of the cerebral cortex. Other collaterals project to the autonomic nervous system, limbic system and brain stem [5,33]. There is an alarm system against noxious stimuli due to the connections of the spinothalamic system with the reticular formation and autonomic nervous system. This system conducts pain, light (crude) touch, sexual and noxious senses [5]. Categorizing spinothalamic and lemniscal systems as two separate systems can be misleading and lead the reader to think that these systems can be activated separately. Both systems react to many sensory stimuli, for instance to crude touch, concurrently. Lemniscal system carries both exteroseptive and interoseptive information. On the other hand, it is possible to overload a system with selective stimulus given slowly or rapidly [47]. Poggio and Mountcastle [48] argued that the lemniscal system had an inhibitory effect on the spinothalamic system. Many techniques targeting sensory treatment act on activating the lemniscal system or establishing the balance between two systems. 8 On the other hand, facial region innervated by the trigeminal nerve projects to the third somatosensory area, which is closely related to the parasympathetic system. If the protective system becomes hypersensitive, general sympathetic hyperactivity, inadequate control or suppression of the external stimuli and attention deficits can be observed. It renders the lemniscal system functional by desensitizing the tactile sensation with various methods or reducing matching [47]. Treatment alternatives that use exteroceptive system The function of this system is to equip the nervous system with information related to the outside world. CNS adapts behavior according to this information. Even though many protective responses are elicited in the motor system, these responses can be altered, modulated or terminated secondary to chemical, emotional, motivational etc stimuli. In contrast to other therapeutic approaches, the function of the exteroceptive input system is not reflexive but informative and adaptive [8]. Cold application: Short-duration, high intensity cold application is rubbing ice on the swollen regions of the muscle for 3-5 seconds with mild pressure. This method causes activation of both the exteroceptors and proprioceptors and, consequently the cortex for a short time but it is not related to motor learning. Cold application, at the same time, may alert the reticular formation, autonomic nervous system and limbic system via its connections. Cold applications should be avoided on the facial region, forehead or behind the ears, and in patients with angina pectoris or coronary artery disease due to the connections of these regions to the reticular formation and autonomic nervous system [8]. Long-duration cold application reduces firing of the neurons and muscle spindles by activating the thermoreceptors. The aim is to reduce the conduction of afferent and efferent stimuli. It inhibits muscle tone and painful muscle spasms. During the application, there is a decrease in the metabolic rate of the tissue. Application needs to be performed under observation due to the possibility of any autonomic side effect and it should be avoided in patients with sensory impairment, autonomic instability and vascular disorders [8,9]. Neutral warmth: It activates the thermoreceptors in the parasympathetic areas of the autonomic nervous system. It reduces the muscle tone, relaxes and alleviates pain. Like cold application, neutral warmth can alter the status of central pattern generators by influencing afferent input directly or indirectly. In the absence of an active participation, neuroplastic adaptations do not occur in the CNS. Johnstone pressure splints is a fine example of neutral warmth application and can be combined with functional activities [9,49]. Moreover, maintaining the stimuli for sometime results in effective inhibition by preventing conduction of other stimuli. Armutlu et al., examined the effects of neuromuscular rehabilitation and Johnstone pressure splints on balance and coordination in MS patients and found that patients using pressure splints, compared to the controls, showed improved cortical onset P37 peak amplitude, one of the components of somatosensory evoked potential, and singlelimb stance time was longer [50]. Vestibular System Vestibular apparatus is a mechanoreceptor [5]. Peripheral proprioceptive receptors give information to the CNS regarding the position of the body in space while the vestibular system gives information about the position of the head in space and its linear acceleration. The vestibular system has a critical role in motor functions due to its close connections and interactions with audio, visual, proprioceptive and motor systems [31]. In case of an injury to one of these systems, body tries to educate other systems and heal itself. The most prominent functions of the vestibular system are regulating the muscle tone and ocular movements, keeping the object in focus while the head or the object is moving, modulating spatial orientation as well as orientations of the head and body. It also supports learning and emotional development [51]. 9 Proprioception and Exercise The effects of exercise in proprioceptive training can be explained in brief: Exercise does not change the number of mechanoreceptors but induces morphological adaptations in muscle spindle. Intrafusal muscle fibers can exhibit some metabolic changes and the latency of stretch reflex response decreases while its amplitude increases. At central level, regular physical activity and exercise can alter proprioception by increasing muscle spindles and inducing plastic changes in the CNS. During physical activity, there is an increase in the muscle spindle output and cortical planning of the sense of proprioception becomes facilitated. This eventually increases the output of the muscle spindle, which possibly results in plastic changes in the CNS, including increase in the strength of the synaptic connections, changes in the number of connections between neurons and structural changes in its organization. Plastic changes in the cortex can eventually modify the cortical map of the human body and improve joint proprioception by increasing the cortical representations of the joints [52,53]. Recovery of the sense of proprioception is achieved by the help of motor control on different levels of the CNS: reflex spinal level, brain stem level (balance and correction responses) and cortical level [54,55]. Reflex level is not sufficient for full motor control. Just like using contract-relax technique, one of the PNF techniques or manual techniques such as tendon pressure to relax the muscle, the utilization of reflex stimulation to regain flexibility will not yield permanent results [56]. For a comprehensive training, ball and disk exercises, plyometric exercise, trampoline exercises, pilates exercises, rapid movement with change of velocity or direction and hopping and jumping should be implemented in the treatment. Perception and interpretation of the senses can be made difficult by using a number of floor surfaces, getting the eyes closed and giving additional tasks [57]. Aksu et al., gave patients with ataxia due to posterior column degeneration a treatment program comprising of proprioceptive neuromuscular facilitation techniques, Johnstone pressure splints, balance and gait training. As a result, they showed that balance and proprioception training comprising neurophysiological approaches had beneficial effects on static and dynamic balance and functional level [58]. Additional tasks during the execution of a basic task disrupt static and dynamic balance, reduce motor performance and gait disturbance. This is evident especially in neurological disorders and results in restrictions in daily life, increased risk of falling and decreased independence. This should be considered in treatment [59]. Combined multisensory approaches Despite the fact that all approaches have the potential of being multisensory, they either focus on a single sensory system or use two or more input modality in autonomic motor programming. Physiotherapists who analyze the combined input that affect the patients’ performance and the effects of autonomic responses determine the aims for expected treatment outcome by problem solving. Classification of multisensory input is extensive and, therefore, this section includes some examples to support the clinicians in classifying new intervention approaches. Clinical decisions, techniques and approaches need to be modified as the patient shows progression. These decisions should be based on understanding and integrating the neurophysiological mechanisms, impact of the environment, motor learning and motor control approaches, as well as the objectives, needs and motivation of the patient. In this section, combined multisensory approaches as rolling of the hand, touch bombardment, gentle shaking, withdrawal with resistance, tapping and head and body movements in space for the purpose of regaining functional control will be discussed. Rolling of the hand approach can induce a proprioceptive reaction in the joints and muscles. It consists of and effectively combines tactile and proprioceptive stimuli to facilitate central pattern generators responsible of extensor motor neurons innervating the hand and 10 finger muscles. At the same time, this technique also triggers spinal generator patterns that block the existing neural network (Figure 4). Figure 4: Rolling of the hand. Another example of proprioceptive-tactile treatment is touch bombardment. The aim of this approach is to bombard the tactile system with continuous input for light touch sensory adaptation or desensitization. Deep pressure involves simultaneous stimulation proprioceptive input and conscious awareness. Proprioceptive discrimination and tactilepressure sensitivity are of paramount importance for high-level tactile discrimination and stereognosis. Gentle shaking technique depends on a combination of vestibular system, muscle spindle and tendons. This technique activates the deep joint receptors at the levels of C1-C3, the vestibular mechanism which is connected with the cerebellum and the motor nuclei of the brain stem and the muscle spindles in the neck. Total body inhibition can occur if this technique is carried out slowly and without interruption in a rhythmical movement. If the pattern is irregular and rapid, facilitation of the spinal motor generators could be observed [8]. Fourth approach as withdrawal with resistance is an effective way to reduce hypertonicity, especially in the lower limb. Withdrawal can be elicited by thumbnail, a sharp object, a piece of ice or plantar light touch stimulus. The withdrawal pattern directly affects alpha motor neurons that innervate the muscles, which respond in the flexor pattern and concurrently suppresses alpha motor neurons innervating the antagonistic muscles. If the antagonistic muscles are hypertonic, hypertonicity is dampened in the neuronal pool of the alpha motor neurons. Adaptation of the touch system to continuing pressure forces, resistance and deep pressure improves the proprioceptive system by a complex adaptation process and a complex interaction ensues between all motor systems. Physiotherapists strategically take systematic desensitization into account to integrate it with the touch system. When the patients are allowed to stimulate themselves, they can increase the stimulation as much as they can tolerate. In that respect, patients have the power to control their environment. They can practice adaptation in various conditions. If the patient feels that the environment is overwhelming, they can develop techniques to reduce the input from within their own systems by controlling the external world. Gradual exposure to intense stimulation increases the excitability threshold of the mechanoreceptors in the skin. Patients benefit from that since it also allows the patient be able to control the stimulation and realize the objective of the treatment. Moreover, vibration applied through a folded towel provides proprioceptive input to dampen the sensitivity of the touch system [60] (Figure 5). 11 Figure 5: Enhancing sensory perception. Tapping method can be used in patients with peripheral orthopedic muscle imbalance, pain and neurological disorders with the same potential. Even though the efficacy of taping method could not be proven in any study, whether it be peripheral instability or CNS dysfunction, the concept and idea remains the same. In the inner range, tapping hypotonic groups of muscles effectively reduces the mechanical pull on the groups of muscles and joints and prevents compensatory stabilization resulting from the need of the CNS. If hypertonia is the result of peripheral instability, tapping a hypertonic muscle in the inner range would stabilize the peripheral system and, consequently, eliminate the need for the CNS to develop hypertonic pattern. Proprioceptive and vestibular input is the most frequently used combined techniques of the physiotherapists. So the last approach is head and body movements in space. As a matter of fact, patient success in nearly all therapeutic tasks depends on coordinated input of these two sensory modalities. If the head movement in space takes place without eliminating the surrounding, vestibular and proprioceptive receptors will be activated to inform the CNS. Direction of the movement and gravity affects the joints, tendons and muscles. Responses of certain body parts vary according to the degree of flexibility within the motor system. Bed mobility, transfers, mat activities and gait involve these two modalities. Despite the fact that all these functional movements can be performed without feedback mechanisms, the CNS cannot effectively adapt to the environmental changes without the input to these system. For that reason alone, if any daily life activity is the impetus for treatment, then examining the integration of the systems and the effects of combined input becomes of paramount importance [61]. Utilization of large exercise balls (Bobath balls) in treatment is classified under proprioceptive-vestibular input category. Moreover, trampoline, balance board or similar apparatus activates the CNS of the patient with large amount of vestibular-proprioceptive input. Trampoline and balance board are generally used to increase balance reactions, help the patient to adapt to the position in space and verticality and increase postural muscle tone (Figures 6 and 7). Figure 6: Examples of exercises with exercise ball in sitting position. 12 Figure 7: Examples of exercises with exercise ball in bed. Each one of these techniques can be performed as a viable treatment approach vestibularproprioceptive stimulation. Holistic treatment techniques based on multisensory input Two advanced therapeutic interventions that have been developed and accepted in the last decade are body weight supported treadmill training and constraint-induced movement treatment. Before the patient is considered functionally independent, he/she should be able to perform functional activities in their natural environment such as ambulation at home and be able to eat using the necessary limb. Robots, which constitute the third advanced therapeutic intervention, offer the therapist and the patients a new and advanced technology to be aware of the patients’ capacities [8]. Body weight supported treadmill training: In the last decade, BWSTT (Figure 8) has been accepted by those who are involved in rehabilitation as an alternative therapeutic approach to give the patients gait training following CNS injuries. Figure 8: Body weight supported treadmill training. A treadmill that supports the body weight and pulls the center of gravity anteriorly would meet the following needs of the CNS by eliminating the environment: 13 1. Controls and triggers the postural system, which is effective and essential. 2. Introduces the power required to execute upright ambulation 3. Controls the stepping strategies to prevent falls. 4. Possesses a cognitive interphase with various motor programs required to perform the functional activity. There are studies in the literature that employed body weight supported treadmill training in patients with incomplete spinal injury [62], Parkinson’s disease [63] and after [64,65]. Hasse et al., conducted a study on 7 non-ambulatory stroke patients and showed that body weight supported treadmill training was effective in improving gait and speed of walking [66]. Miyai et al., [67] showed that, compared to traditional physical therapy, body weight supported treadmill training had long-term beneficial effects on short-step gait. Further, improvements in ADL, motor performance and ambulation far exceed those achieved by traditional physical therapy approaches [68,69]. Constraint-Induced Movement Treatment (CIMT): CIMT (Figure 9) is the treatment of patients with motor system limitations and involves immobilization of the unaffected arm to achieve significant motor tasks with the affected arm [70,71]. The focus of CIMT is to shape the behavior to improve functional use of the affected upper limb. CIMT is based on the impairment in hand and arm function after a stroke due to alterations in the cortical representation of the upper limb in the primary sensory cortex, which results in learned non-use. Learned non-use develops in the early stages after a stroke when the patient grows a confidence in the unaffected limb and compensates the difficulty by using the affected limb. This compensation prevents the functional healing of the affected limb [72]. Figure 9: CIMT in activities of daily living. It has been shown that CIMT is a treatment used effectively in patients with chronic stroke who has sufficient motor control and would benefit from exercise [73-85], patients who suffered brain injury [86-88], pediatric patients with hemiplegic cerebral palsy [89-92] and Parkinson’s disease patients [93,94]. CIMT approach is being used successfully for the rehabilitation of lower limb in patients with stroke, incomplete spinal cord injury and pelvic fracture. CIMT can be beneficial in various chronic disorders such as phantom limb pain and aphasia [77]. Even though there are many studies on the beneficial effects of CIMT [73-75], small sample size, heterogeneity among the patient groups, duration and intensity of the treatment 14 and assessment criteria emerge as the limitations of these studies. The neurophysiological mechanisms underlying CIMT are based on overcoming learned non-use and plastic reorganization [95,96]. It has been confirmed that CIMT improves usedependent cortical reorganization in patients with post-stroke paresis of the upper limb [97100]. However, there are questions as to whether the improved motor function of the upper limb after CIMT is a result of the reduction in learned non-use or of overcoming a sense of increased effort during movement [101]. Neuroimaging studies such as transcutaneal magnetic stimulation and functional MRI, elektro-encephalography [101,102] provided us with the evidence of neuroplasticity and cortical changes with CIMT [78,98,103,104]. These studies showed that intensive CIMT practice in chronic stroke patients caused cortical reorganization in the region involved in the voluntary movement of the affected limb [72,105]. Robotics One of the advanced approaches most popular among clinical community in recent years is the robotics technology used to regain control of functional movements. Robots are used for the purpose of achieving an increase in movement patterns both in upper and lower limbs (Figure 10). It allows safe, intensive and target-oriented rehabilitation in all kinds of motor disorders, ranging from mild to severe, due to neurological diseases [106]. Robotic rehabilitation of gait yields successful results in other gait parameters such as speed of walking and endurance, balance, motor gain in the lower limb, symmetry, step length and double stance phase [107-109]. While the rehabilitation of the lower limb focuses on ambulation [110,111] that of the upper limb focuses on the functions of the shoulder, elbow and wrist during reaching out [112-115]. It is the contribution of robotic devices on the recovery of functional ambulation that is studied most in patients with spinal cord injury [110,111] whereas recovery of the upper limb functional movements have been analyzed in patients with stroke [112-117]. Figure 10: Robotic rehabilitation for upper and lower limbs. In patients with neurological trauma, robotic devices function as a therapeutic tool and orthosis, which supports target-oriented training programs based on functional movements and motor control output [118]. Thanks to its advantages in terms of controllable assistance or resistance during movement, good repeatability, objective and quantifiable measures of performance and high motivation through the use of interactive biofeedback, they have the potential to increase the intensity of rehabilitation [16]. Sensory discriminative retraining It is based on the principles of intervention strategies and neuroplasticity for the retraining of sense discrimination. As we all know, motor and sensory systems are connected. Therefore, even though the focus is on increasing the sensitivity of the somatosensory system and its ability to respond, ultimate goal is to achieve a good motor control. 15 Somatosensory degradation present in some people can cause locomotion problems (such as focal hand dystonia) [34]. There is a close relation between all high level perceptive and locomotor functions. Brain, in order to accurately assess the interactions between the body and environment, should establish a relation between sensory input and motor output. Therefore, sensory impairments result in serious problems with motor control [33]. Prevention of abnormal movements and stretch is important so as to be able to implement effective sensory discrimination training. If abnormal movement patterns are continuously repeated, person learns this, resulting in negative learning. Deep receptors should be included in retraining. Although deep receptors are located in the 3a region, they provide input for proprioception and kinesthesia through deep pressure, tapping, weight bearing, and muscle tension. These receptors, at the same time, provide information to the sensory-motor feedback loop that guides the increased contraction and coordinated movement. Deep receptors also contribute to object recognition (size, shape, attributes) as well. They also help with static and dynamic joint position and sense of location, improvement of motor control and control of joint movements. Sometimes it is challenging to implement retraining of the sense without eliciting abnormal motor responses. This is an indication for utilization of imagery rather than physical practice. Imagery refers to creating representations of objects or completion of a task by without physically using the objects. Therefore, sensory discrimination programs utilize visual imagery such as playing a musical instrument, motor imagery or mental rehearsal in sequential tasks to help restore sense [119]. References 1. Pomeroy V, Aglioti SM, Mark VW, McFarland D, Stinear C, et al. (2011) Neurological principles and rehabilitation of action disorders: rehabilitation interventions. Neurorehabil Neural Repair 25: 33-43. 2. Batson G (2009) Update on proprioception: considerations for dance education. J Dance Med Sci 13: 35-41. 3. Shumway-Cook A, Woollacott MH (1995) Motor Control: Theory and Practical Application. Williams & Wilkins, Baltimore, USA. 4. Dietz V (2002) Proprioception and locomotor disorders. Nat Rev Neurosci 3: 781-790. 5. Gilman S Manter JT, Gatz AJ et al. (2002) Manter and Gatz’s essentials of clinical neuroanatomy and neurophysiology. FA Davis, Philadelphia. 6. Guyton D RB, Guskiewicz KM (2000) Proprioception and Neuromuscular Control in Joint Stability. Human Kinetics Inc. Champaign-Urbana, IL. 7. Lam T, Pearson KG (2002) The role of proprioceptive feedback in the regulation and adaptation of locomotor activity. Adv Exp Med Biol 508: 343-355. 8. Umphred DA (2007) Neurological Rehabilitation. Pg: 217-251. 9. Susan B. O’Sullivan TJS (1999) Physical Rehabilitation Laboratory Manual: Focus on Functional Training. Jean-François Vilain. 10. Susan B. O’Sullivan TJS, George DF (2014) Physical Rehabilitation. 11. Robbins SM, Houghton PE, Woodbury MG, Brown JL (2006) The therapeutic effect of functional and transcutaneous electric stimulation on improving gait speed in stroke patients: a meta-analysis. Arch Phys Med Rehabil 87: 853-859. 12. Barsi GI, Popovic DB, Tarkka IM, Sinkjaer T, Grey MJ (2008) Cortical excitability changes following grasping exercise augmented with electrical stimulation. Exp Brain Res 191: 57-66. 13. Bogataj U, Gros N, Kljajić M, Aćimović R, Malezic M (1995) The rehabilitation of gait in patients with hemiplegia: a comparison between conventional therapy and multichannel functional electrical stimulation therapy. Phys Ther 75: 490-502. 14. Bogataj U, Gros N, Kljajic M, Acimovic-Janezic R (1997) Enhanced rehabilitation of gait after stroke: a case report of a therapeutic approach using multichannel functional electrical stimulation. IEEE transactions on rehabilitation engineering : a publication of the IEEE Engineering in Medicine and Biology Society 5: 221-232. 16 15. Kottink AI, Oostendorp LJ, Buurke JH, Nene AV, Hermens HJ, et al. (2004) The orthotic effect of functional electrical stimulation on the improvement of walking in stroke patients with a dropped foot: a systematic review. Artif Organs 28: 577-586. 16. Belda-Lois JM, Mena-del Horno S, Bermejo-Bosch I, Moreno JC, Pons JL, et al. (2011) Rehabilitation of gait after stroke: a review towards a top-down approach. J Neuroeng Rehabil 8: 66. 17. Ribot-Ciscar E, Rossi-Durand C, Roll JP (1998) Muscle spindle activity following muscle tendon vibration in man. Neurosci Lett 258: 147-150. 18. Fontana TL, Richardson CA, Stanton WR (2005) The effect of weight-bearing exercise with low frequency, whole body vibration on lumbosacral proprioception: a pilot study on normal subjects. Aust J Physiother 51: 259-263. 19. Johansson H (1991) Role of knee ligaments in proprioception and regulation of muscle stiffness. J Electromyogr Kinesiol 1: 158-179. 20. El-Tamawy MS, Darwish MH, Khallaf ME (2012) Effects of augmented proprioceptive cues on the parameters of gait of individuals with Parkinson’s disease. Ann Indian Acad Neurol 15: 267-272. 21. Ghoseiri K, Forogh B, Sanjari MA, Bavi A (2009) The effect of a vibratory lumber orthosis on walking velocity in patients with Parkinson’s disease. Prosthet Orthot Int 33: 82-88. 22. Müller SV, von Schweder AJ, Frank B, Dengler R, Münte TF, et al. (2002) The effects of proprioceptive stimulation on cognitive processes in patients after traumatic brain injury. Arch Phys Med Rehabil 83: 115-121. 23. Karnath HO, Christ K, Hartje W (1993) Decrease of contralateral neglect by neck muscle vibration and spatial orientation of trunk midline. Brain 116 : 383-396. 24. Avanzino L, Pelosin E, Abbruzzese G, Bassolino M, Pozzo T, et al. (2014) Shaping motor cortex plasticity through proprioception. Cereb Cortex 24: 2807-2814. 25. Houk J, Henneman E (1967) Responses of Golgi tendon organs to active contractions of the soleus muscle of the cat. J Neurophysiol 30: 466-481. 26. Moore JC (1974) The Golgi tendon organ and the muscle spindle. The American journal of occupational therapy: official publication of the American Occupational Therapy Association 28: 415-420. 27. Guyton AC (1991) Basic neuroscience: anatomy and physiology. Saunders, USA. 28. Ge HY, Madeleine P, Arendt-Nielsen L (2004) Sex differences in temporal characteristics of descending inhibitory control: an evaluation using repeated bilateral experimental induction of muscle pain. Pain 110: 72-78. 29. Pertovaara A (1979) Modification of human pain threshold by specific tactile receptors. Acta Physiol Scand 107: 339-341. 30. Pickar JG (2002) Neurophysiological effects of spinal manipulation. Spine J 2: 357-371. 31. Groot J, Chusid J (1991) Correlative neuroanatomy. (21st edition), Appleton & Lange, Michigan, USA. 32. Lephart SM Fu FH (2000) Proprioception and Neuromuscular Control in Joint Stability. Champaign, IL: Human Kinetics. 33. Carrillo RR, Ros E, Tolu S, Nieus T, D’Angelo E (2008) Event-driven simulation of cerebellar granule cells. Biosystems 94: 10-17. 34. Byl NN, Merzenich MM, Jenkins WM (1996) A primate genesis model of focal dystonia and repetitive strain injury: I. Learning-induced dedifferentiation of the representation of the hand in the primary somatosensory cortex in adult monkeys. Neurology 47: 508-520. 35. Crown ED, Grau JW (2005) Evidence that descending serotonergic systems protect spinal cord plasticity against the disruptive effect of uncontrollable stimulation. Exp Neurol 196: 164-176. 36. Zehr EP, Sale DG (1994) Ballistic movement: muscle activation and neuromuscular adaptation. Can J Appl Physiol 19: 363-378. 37. Chalmers G (2004) Re-examination of the possible role of Golgi tendon organ and muscle spindle reflexes in proprioceptive neuromuscular facilitation muscle stretching. Sports Biomech 3: 159-183. 17 38. Decicco PV, Fisher MM (2005) The effects of proprioceptive neuromuscular facilitation stretching on shoulder range of motion in overhand athletes. J Sports Med Phys Fitness 45: 183-187. 39. Marek SM, Cramer JT, Fincher AL, Massey LL, Dangelmaier SM, et al. (2005) Acute Effects of Static and Proprioceptive Neuromuscular Facilitation Stretching on Muscle Strength and Power Output. J Athl Train 40: 94-103. 40. Karaduman A, Yildirim SA, Yilmaz ÖT (2013) Physical Therapy and Rehabilitation After Stroke. pelikan, Ankara. 41. Buchanan PA, Ulrich BD (2001) The Feldenkrais Method: a dynamic approach to changing motor behavior. Res Q Exerc Sport 72: 315-323. 42. Butler DS (1991) Mobilization of the nervous system. Churchill Livingstone, New York. 43. Butler DS (1989) Adverse mechanical tension in the nervous system: a model for assessment and treatment. Aust J Physiother 35: 227-238. 44. Kornberg C, McCarthy T (1992) The effect of neural stretching technique on sympathetic outflow to the lower limbs. J Orthop Sports Phys Ther 16: 269-274. 45. Feldman DE, Brecht M (2005) Map plasticity in somatosensory cortex. Science 310: 810-815. 46. Pleger B, Foerster AF, Ragert P, Dinse HR, Schwenkreis P, et al. (2003) Functional imaging of perceptual learning in human primary and secondary somatosensory cortex. Neuron 40: 643-653. 47. Ayres AJ (1974) The development of sensory integrative theory and practice. Kendall/Hunt Publishing Company, Dubuque. 48. Poggıo GF, Mountcastle VB (1960) A study of the functional contributions of the lemniscal and spinothalamic systems to somatic sensibility. Central nervous mechanisms in pain. Bull Johns Hopkins Hosp 106: 266-316. 49. Johnstone M (1995) Restoration of normal movement after stroke. Churchill Livingstone, New York. 50. Armutlu K (1996) The effects of neuromuskuler rehabilitation and johnston pressure splints on balance and coordination in multiple sclerosis [phD]. Ankara. 51. Wilson V, Peterson B (1980) The role of the vestibular system in posture and movement. Medical Physiology, St Louis, MO CV Mosby Co, Pg: 813-836. 52. Ashton-Miller JA, Wojtys EM, Huston LJ, Fry-Welch D (2001) Can proprioception really be improved by exercises? Knee Surg Sports Traumatol Arthrosc 9: 128-136. 53. Hutton RS, Atwater SW (1992) Acute and chronic adaptations of muscle proprioceptors in response to increased use. Sports Med 14: 406-421. 54. Ergen E, Ulkar B (2008) Proprioception and ankle injuries in soccer. Clin Sports Med 27: 195-217. 55. Lephart SM, Pincivero DM, Giraldo JL, Fu FH (1997) The role of proprioception in the management and rehabilitation of athletic injuries. Am J Sports Med 25: 130-137. 56. Moore M (2007) Golgi Tendon Organs Neuroscience Update with Relevance to Stretching and Proprioception in Dancers. Journal of Dance Medicine & Science 11: 85-92. 57. Medley A, Thompson M (2005) Usefulness of variations of the Timed Up and Go in apparently healthy individuals. Physical & Occupational Therapy in Geriatrics 23: 1-23. 58. Yildirim SA, Armutlu K, Guclu A (2001) Neurophysiological balance and proprioceptive training in patients with posterior column degeneration. Turkish Journal of Physiotherapy Rehabilitation 12: 16-20. 59. Demirci C (2009) The effects of additional motor and cognitive tasks on balance and postural stability in ataxic patients [master thesis]. Ankara. 60. Ayres AJ, Robbins J (2005) Sensory integration and the child. Western Psycological Services, Los Angeles, USA. 61. Hlavacka F, Mergner T, Krizkova M (1996) Control of the body vertical by vestibular and proprioceptive inputs. Brain Res Bull 40: 431-434. 62. Behrman AL, Lawless-Dixon AR, Davis SB, Bowden MG, Nair P, et al. (2005) Locomotor training progression and outcomes after incomplete spinal cord injury. Phys Ther 85: 1356-1371. 18 63. Toole T, Maitland CG, Warren E, Hubmann MF, Panton L (2005) The effects of loading and unloading treadmill walking on balance, gait, fall risk, and daily function in Parkinsonism. NeuroRehabilitation 20: 307-322. 64. Barbeau H, Visintin M (2003) Optimal outcomes obtained with body-weight support combined with treadmill training in stroke subjects. Arch Phys Med Rehabil 84: 1458-1465. 65. Sullivan KJ, Knowlton BJ, Dobkin BH (2002) Step training with body weight support: effect of treadmill speed and practice paradigms on poststroke locomotor recovery. Arch Phys Med Rehabil 83: 683-691. 66. Hesse S, Bertelt C, Jahnke MT, Schaffrin A, Baake P, et al. (1995) Treadmill training with partial body weight support compared with physiotherapy in nonambulatory hemiparetic patients. Stroke 26: 976-981. 67. Miyai I, Fujimoto Y, Yamamoto H, Ueda Y, Saito T, et al. (2002) Long-term effect of body weight-supported treadmill training in Parkinson’s disease: a randomized controlled trial. Arch Phys Med Rehabil 83: 1370-1373. 68. Miyai I, Fujimoto Y, Ueda Y, Yamamoto H, Nozaki S, et al. (2000) Treadmill training with body weight support: its effect on Parkinson’s disease. Arch Phys Med Rehabil 81: 849-852. 69. Rose MH, Løkkegaard A, Sonne-Holm S, Jensen BR (2013) Improved clinical status, quality of life, and walking capacity in Parkinson’s disease after body weight-supported high-intensity locomotor training. Arch Phys Med Rehabil 94: 687-692. 70. Chen G, Patten C, Kothari DH, Zajac FE (2005) Gait deviations associated with post-stroke hemiparesis: improvement during treadmill walking using weight support, speed, support stiffness, and handrail hold. Gait Posture 22: 57-62. 71. Van der Lee JH (2003) Constraint-induced movement therapy: some thoughts about theories and evidence. Journal of rehabilitation medicine : official journal of the UEMS European Board of Physical and Rehabilitation Medicine 41: 41-45. 72. Grotta JC, Noser EA, Ro T, Boake C, Levin H, et al. (2004) Constraint-induced movement therapy. Stroke 35: 2699-2701. 73. Barreca S, Wolf SL, Fasoli S, Bohannon R (2003) Treatment interventions for the paretic upper limb of stroke survivors: a critical review. Neurorehabil Neural Repair 17: 220-226. 74. Bonaiuti D, Rebasti L, Sioli P (2007) The constraint induced movement therapy: a systematic review of randomised controlled trials on the adult stroke patients. Eura Medicophys 43: 139-146. 75. Taub E, Morris DM (2001) Constraint-induced movement therapy to enhance recovery after stroke. Curr Atheroscler Rep 3: 279-286. 76. van der Lee JH, Wagenaar RC, Lankhorst GJ, Vogelaar TW, Devillé WL, et al. (1999) Forced use of the upper extremity in chronic stroke patients: results from a single-blind randomized clinical trial. Stroke 30: 2369-2375. 77. Miltner WH, Bauder H, Sommer M, Dettmers C, Taub E (1999) Effects of constraint-induced movement therapy on patients with chronic motor deficits after stroke: a replication. Stroke 30: 586-592. 78. Liepert J, Bauder H, Wolfgang HR, Miltner WH, Taub E, et al. (2000) Treatment-induced cortical reorganization after stroke in humans. Stroke 31: 1210-1216. 79. Kunkel A, Kopp B, Müller G, Villringer K, Villringer A, et al. (1999) Constraint-induced movement therapy for motor recovery in chronic stroke patients. Arch Phys Med Rehabil 80: 624-628. 80. Alberts JL, Butler AJ, Wolf SL (2004) The effects of constraint-induced therapy on precision grip: a preliminary study. Neurorehabil Neural Repair 18: 250-258. 81. Dettmers C, Teske U, Hamzei F, Uswatte G, Taub E, et al. (2005) Distributed form of constraint-induced movement therapy improves functional outcome and quality of life after stroke. Arch Phys Med Rehabil 86: 204-209. 82. Fritz SL, Light KE, Patterson TS, Behrman AL, Davis SB (2005) Active finger extension predicts outcomes after constraint-induced movement therapy for individuals with hemiparesis after stroke. Stroke 36: 1172-1177. 83. Page SJ, Sisto S, Levine P, McGrath RE (2004) Efficacy of modified constraint-induced movement therapy in chronic stroke: a single-blinded randomized controlled trial. Arch Phys Med Rehabil 85: 14-18. 84. Rijntjes M, Hobbeling V, Hamzei F, Dohse S, Ketels G, et al. (2005) Individual factors in constraint-induced movement therapy after stroke. Neurorehabilitation and neural repair 19: 238-249. 19 85. Suputtitada A, Suwanwela NC, Tumvitee S (2004) Effectiveness of constraint-induced movement therapy in chronic stroke patients. Journal of the Medical Association of Thailand = Chotmaihet thangphaet 87: 14821490. 86. Taub E, Lum PS, Hardin P, Mark VW, Uswatte G (2005) AutoCITE: automated delivery of CI therapy with reduced effort by therapists. Stroke 36: 1301-1304. 87. Willis JK, Morello A, Davie A, Rice JC, Bennett JT (2002) Forced use treatment of childhood hemiparesis. Pediatrics 110: 94-96. 88. Shaw SE, Morris DM, Uswatte G, McKay S, Meythaler JM et al. (2005) Constraint-induced movement therapy for recovery of upper-limb function following traumatic brain injury. Journal of rehabilitation research and development 42: 769-778. 89. Taub E, Ramey SL, DeLuca S, Echols K (2004) Efficacy of constraint-induced movement therapy for children with cerebral palsy with asymmetric motor impairment. Pediatrics 113: 305-312. 90. Eliasson AC, Krumlinde-sundholm L, Shaw K, Wang C (2005) Effects of constraint-induced movement therapy in young children with hemiplegic cerebral palsy: an adapted model. Dev Med Child Neurol 47: 266-275. 91. Gordon AM, Charles J, Wolf SL (2006) Efficacy of constraint-induced movement therapy on involved upperextremity use in children with hemiplegic cerebral palsy is not age-dependent. Pediatrics 117: e363-373. 92. Bonnier B, Eliasson AC, Krumlinde-Sundholm L (2006) Effects of constraint-induced movement therapy in adolescents with hemiplegic cerebral palsy: a day camp model. Scand J Occup Ther 13: 13-22. 93. Tuite P, Anderson N, Konczak J (2005) Constraint-induced movement therapy in Parkinson’s disease. Mov Disord 20: 910-911. 94. Lee KS, Lee WH, Hwang S (2011) Modified constraint-induced movement therapy improves fine and gross motor performance of the upper limb in Parkinson disease. American journal of physical medicine & rehabilitation / Association of Academic Physiatrists 90: 380-386. 95. Mark VW, Taub E (2004) Constraint-induced movement therapy for chronic stroke hemiparesis and other disabilities. Restor Neurol Neurosci 22: 317-336. 96. Nudo RJ, Wise BM, SiFuentes F, Milliken GW (1996) Neural substrates for the effects of rehabilitative training on motor recovery after ischemic infarct. Science 272: 1791-1794. 97. Taub E, Uswatte G, Pidikiti R (1999) Constraint-Induced Movement Therapy: a new family of techniques with broad application to physical rehabilitation--a clinical review. J Rehabil Res Dev 36: 237-251. 98. Taub E, Uswatte G, King DK, Morris D, Crago JE, et al. (2006) A placebo-controlled trial of constraint-induced movement therapy for upper extremity after stroke. Stroke 37: 1045-1049. 99. Nudo RJ, Wise BM, SiFuentes F, Milliken GW (1996) Neural substrates for the effects of rehabilitative training on motor recovery after ischemic infarct. Science 272: 1791-1794. 100.Kopp B, Kunkel A, Mühlnickel W, Villringer K, Taub E, et al. (1999) Plasticity in the motor system related to therapy-induced improvement of movement after stroke. Neuroreport 10: 807-810. 101.Sunderland A, Tuke A (2005) Neuroplasticity, learning and recovery after stroke: a critical evaluation of constraint-induced therapy. Neuropsychol Rehabil 15: 81-96. 102.Cooper BA (1994) Long-term care design: current research on the use of color. J Healthc Des 6: 61-67. 103.Bonifer N, Anderson KM (2003) Application of constraint-induced movement therapy for an individual with severe chronic upper-extremity hemiplegia. Phys Ther 83: 384-398. 104.Sterr A, Elbert T, Berthold I, Kölbel S, Rockstroh B, et al. (2002) Longer versus shorter daily constraint-induced movement therapy of chronic hemiparesis: an exploratory study. Arch Phys Med Rehabil 83: 1374-1377. 105.Taub E, Uswatte G, Morris DM (2003) Improved motor recovery after stroke and massive cortical reorganization following constraint-induced movement therapy. Physical medicine and rehabilitation clinics of North America 14: 77-91. 106.Fasoli SE, Krebs HI, Stein J, Frontera WR, Hughes R, et al. (2004) Robotic therapy for chronic motor impairments after stroke: Follow-up results. Arch Phys Med Rehabil 85: 1106-1111. 20 107.Riener R, Lunenburger L, Jezernik S, Anderschitz M, Colombo G, et al. (2005) Patient-cooperative strategies for robot-aided treadmill training: first experimental results. Neural Systems and Rehabilitation Engineering, IEEE Transactions on 13: 380-394. 108.Bogey R, Hornby GT (2007) Gait training strategies utilized in poststroke rehabilitation: are we really making a difference? Top Stroke Rehabil 14: 1-8. 109.Barbeau H, Visintin M (2003) Optimal outcomes obtained with body-weight support combined with treadmill training in stroke subjects. Arch Phys Med Rehabil 84: 1458-1465. 110.Schindl MR, Forstner C, Kern H, Hesse S (2000) Treadmill training with partial body weight support in nonambulatory patients with cerebral palsy. Arch Phys Med Rehabil 81: 301-306. 111.Winchester P, McColl R, Querry R, Foreman N, Mosby J, et al. (2005) Changes in supraspinal activation patterns following robotic locomotor therapy in motor-incomplete spinal cord injury. Neurorehabil Neural Repair 19: 313-324. 112.Ferraro M, Palazzolo JJ, Krol J, Krebs HI, Hogan N, et al. (2003) Robot-aided sensorimotor arm training improves outcome in patients with chronic stroke. Neurology 61: 1604-1607. 113.Stein J, Krebs HI, Frontera WR, Fasoli SE, Hughes R, et al. (2004) Comparison of two techniques of robotaided upper limb exercise training after stroke. Am J Phys Med Rehabil 83: 720-728. 114.Krebs HI, Ferraro M, Buerger SP, Newbery MJ, Makiyama A, et al. (2004) Rehabilitation robotics: pilot trial of a spatial extension for MIT-Manus. J Neuroeng Rehabil 1: 5. 115.Fasoli SE, Krebs HI, Hogan N (2004) Robotic technology and stroke rehabilitation: translating research into practice. Top Stroke Rehabil 11: 11-19. 116.Fasoli SE, Trombly CA, Tickle-Degnen L, Verfaellie MH (2002) Effect of instructions on functional reach in persons with and without cerebrovascular accident. Am J Occup Ther 56: 380-390. 117.Hesse S, Schmidt H, Werner C, Bardeleben A (2003) Upper and lower extremity robotic devices for rehabilitation and for studying motor control. Current opinion in neurology 16: 705-710. 118.Wolf SL, Lecraw DE, Barton LA, Jann BB (1989) Forced use of hemiplegic upper extremities to reverse the effect of learned nonuse among chronic stroke and head-injured patients. Exp Neurol 104: 125-132. 119.Porter K, Foster J (1986) The mental athlete. Ballantine Books, New York. 21