Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Condensed matter physics wikipedia , lookup
Schiehallion experiment wikipedia , lookup
Electromagnet wikipedia , lookup
Electrical resistance and conductance wikipedia , lookup
Aharonov–Bohm effect wikipedia , lookup
Superconductivity wikipedia , lookup
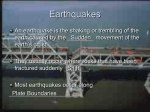
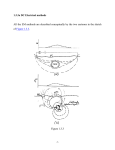
Geophysical tools for site investigations Guy MARQUIS, EOST-IPG Strasbourg 1 Geophysics? What for? Geophysical prospecting methods give us information on the structure and the physical properties of the subsurface. Their main advantage is that they are neither invasive (unlike boreholes) nor destructive (unlike trenches), i.e. the subsurface is not permanently damaged after a geophysical survey. Another strong point for geophysics is that it allows the coverage of a large area (or volume) and can usually be implemented cheaply in almost any type of environment. Geophysical prospecting methods can provide either a map, a section or a 3D volume of a given area, like a snapshot at some time t, but many methods can also be used as to monitor an area of interest to detect time changes of some physical property or mass flow. One important point before we go further is that for non-specialists, geophysics should be thought of as a toolbox, and so selecting the right method(s) that will help you get some insight into your problem is the most crucial step. To keep the parallel with the toolbox, if you need to tighten a screw, using a hammer - even if it’s a very good one - won’t be much help... Before presenting the geophysical prospecting methods per se, we are first going to have a quick look at the main physical properties of earth materials so that we can have an idea of what geophysics actually sees. Physical properties of earth materials A geophysical map (or section or volume) will present variations of subsurface physical properties, each of them having its own dynamics and mechanism. This section is voluntarily made short. Several good books, e.g. Mavko et al. (1998) have been published on this vast subject. Seismic velocity When we apply stress on an object, say by hitting on it, the resulting strain propagates away from the impact point. Two types of elastic waves are produced: body waves and surface waves. We will look here more closely at the physical properties related to body waves (actually, those related to surface waves are the same). An elastic body can be deformed in two ways: by compression-dilatation or by shearing. There are then two types of body waves, P-waves and S-waves, for which the velocities are given by 2 s Vp = K + 4µ/3 ρ s Vs = µ ρ where K is the bulk modulus, µ is the shear modulus and ρ is the density. By inspection, we see that Vp > Vs . For fluids µ = 0 so the presence of a porous fluid reduces Vp and Vs . For example, Wyllie’s time-average equation φ 1 1−φ + = V Vm Vf where Vm and Vf are the velocities of the matrix and the fluid respectively. In unsaturated media (saturation S), we have 1 1−φ φ φ = +S∗ + (1 − S) ∗ V Vm Vf Va where Va is the sound velocity in air. The first two columns of Table 1 give examples of velocities (P and S) for selected earth materials. Geophysically speaking, seismic methods are sensitive to these velocities. Electrical conductivity Electrical conductivity, usually denoted by σ, is the physical property with the largest range of values. We often prefer to use its reciprocal, the electrical resistivity (ρ = 1/σ), which has integer values for most earth materials. Indeed, most of them are poor cunductors, with the exception of metal sulfides and oxides and graphite. As a consequence, electrical conduction in most earth materials is electrolytic, i.e. related to the presence fluid in the pores or the fractures of a rock. Of course, the nature of the fluid is very important: brine is more conducting than, say, hydrocarbons. There is a slew of models relating electrical resistivity to porosity. For sedimentary rocks, which is what interests us the most in near-surface studies, we like to use the so-called Archie’s law: ρ = ρf aφ−m where ρ and ρf are the resistivities of the rock and the fluid, a is the saturation coefficient, φ is the porosity, and m is the exponent. The third column of Table 1 shows the resistivities of selected earth materials. We note that weathering decreases strongly the resistivity of hard rocks, due to an increment of their porosity and the prioduction of clay minearls. Electrical and Electromagnetic methods are sensitive to the electrical resistivity of the subsurface. 3 5 10 m = 1.5 m = 2.0 4 ρ (Ω.m) 10 3 10 2 10 0 10 20 30 Porosité (%) 40 50 Figure 1: Archie’s law for porosities between 0 and 50%. Water resistivity is taken as 100 Ω.m. Dielectric permittivity The dielectric permittivity (²), also called wrongly dielectric constant, characterizes the ability of a material to charge itself when excited by an electric field. For most earth materials, ² is close to that of free space, i.e. ²0 = 8.8510−12 F/m. There is however a strong influence of the presence of water since ²water ≈ 81²0 . There are many relationships between porosity and ²: one is close to Wyllie’s equation for seismic velocity. If ²m and ²f are the permittivities of the matrix and the fluid respectively √ √ √ ²e = (1 − φ) ²m + φ ²f . There is also the empirical relation of Topp (1980) based on laboratory measurements ²e = 3.03 + 9.3φ + 146.0φ2 − 76.7φ3 . In an unsaurated medium, saturation (S) must be taken into account. Wyllie’s relation becomes √ √ √ √ ²e = (1 − φ) ²m + φS ²f + φ(1 − S) ²0 . Ground-penetrating radar is sensitive to subsurface dielectric permittivity variations. Density Density depends essentially on the nature of the material. For a porous rock, we have simply ρ = (1 − φ)ρm + φρf where ρm and ρf are the matrix and fluid densities respectively. Gravity is sensitive to underground density variations. 4 Influence de la teneur en eau 22 théorique Topp 20 18 16 ε 14 12 10 8 6 4 2 0 0.05 0.1 0.15 0.2 porosité 0.25 0.3 0.35 Figure 2: Theoretical (solid) and empirical (Topp’s, dashed) for porosities from 0 to 35 %, given relative to ²0 . Magnetic susceptibility Magnetic properties of rocks depend on the presence of magnetic minerals. For crystalline rocks, iron (e.g. magnetite Fe3 O4 ) and titanium oxydes are the main magnetization carriers. Sedimentary rocks may contain magnetic particles that come from the weathering of crystalline rocks, usually hematite (Fe2 O3 ). Magnetic prospection is sensitive to underground magnetic property variations. Which method(s) should I use? Let us look first at the physical properties of different earth materials. As stated above, each prospecting method is sensitive to a given parameter. Therefore, not all methods are necessarily relevant to all problems we may face in near-surface studies. I try to synthetize my personal vision on the relevance of each method for a few problems in Table 2. Other practitioners may have a different opinion on some specifics, but, based on literature and common practice, this is the best I could come up with... A quick comment. How did I make Table 2? Take the example of an aquifer: it seems likely that the methods sensitive to parameters strongly influenced by water content should be used. Since electrical properties are the most influenced by water content, electrical, EM, and ground-penetrating radar methods have my preference. What’s the use of magnetic prospecting in this case? 5 Material (unit) Air Water Clay Schists Sandstone Tills Sand Limestone Salt Weathered rocks Clean rocks Massive sulfides Graphite Vp (m/s) 330 1500 1100-2500 2400-5000 2000-4500 1500-2600 1200-1900 3500-5000 4000-5500 2500-3800 5500-6300 5000-6000 1400-1600 Vs (m/s) 0 0 650-1500 1400-3000 1200-2700 900-1600 700-1100 2000-3000 2400-3200 1500-2300 3200-3700 3000-3500 800-900 Resistivity (Ω.m) ∞ 3-100 3-100 3-30 30-1000 30-1000 300-10000 300-10000 1000-10000 3-300 1000-100000 0.01-1 0.1-10 Density (kg/m3 ) 1 1000 1500-1700 2100-2600 2150-2650 1500-2000 1600-2000 2500-2750 2100-2400 2600-2900 2700-2900 4900-5200 2000 Permittivity (ײ0 ) 1 81 8-12 4-5 4-5 5-10 4-30 6-8 1 8-12 4-5 4-5 4-5 Susceptibility (×10−6 SI) 0 0 0-1000 0-1200 35-1000 0-2000 0-2000 10-25000 -10 >40000 >40000 1000-5000 -200- -80 Table 1: Synthesis of physical property ranges for selected earth materials. Problem Geological structures Aquifers Waste sites Contamination Landslides Archeology Competence Leaks Cavities Refract + o o x o o + o o Reflex + o x x x x + o o Resist + + + + + + x + + EM o + + + o + x + o Radar o + + o o + x + + Grav + x o x o o x x + Mag + x + x x + x x + Table 2: Usefulness of the main geophysical prospecting methods presented here. Legend: +, good; o, OK; x, no. This table reflects the author’s point of view... 6 Prospecting methods Seismic prospection Seismic prospection is based on the propagation of elastic waves in the subsurface. In practice, we produce an impact at the surface (with a shotgun, a sledgehammer, a small explosive charge, etc.) and record the different waves produced by it with geophones. When a seismic wave reaches a boundary separating two layers of different velocities, some of the energy is backscattered to the surface (reflection) and the rest keeps on propagating downwards. Seismic reflection Consider a seismic wave starting from a source S reaching an interface between a layer (of thickness h) of velocity V 1 and a half-space of velocity V 2. The reflected wave is recorded by a receiver (i.e. a geophone) at some distance x from the source (cf. Figure 3). Figure 3: Raypath of a reflected seismic wave. S: source, R: receiver. The time taken for the reflected wave to travel from S to R is given by µ t2 = x V1 ¶2 + t20 with t0 = 2h/V1 , the zero-offset travel time. This curve is a hyperbola in x − t space. 7 The amplitude of the reflected wave depends essentially on the impedance (Z = ρV ) contrast between the two layers, which we call the reflection coefficient: R= Z2 − Z1 ρ2 V2 − ρ1 V1 = Z2 + Z1 ρ2 V2 + ρ1 V1 Seismic refraction If V2 > V1 , we will reach an incidence angle for which no energy will be transmitted to the second layer. At this angle, called critical angle, the transmitted wave propagates along the interface between the two media (cf. Figure 4). Figure 4: Seismic refraction. The traveltime of such critically refracted wave (we often omit the term ”critically”) is obtained by v u µ x 2h u V1 t= + t1 − V2 V1 V2 ¶2 i.e. a straight line of slope 1/V2 . Electrical prospecting For this prospecting method, we inject electrical current into the ground with two electrodes (called current electrodes) and measure the resulting electric potential difference between two other electrodes (called potential electrodes). The potential difference will depend on : - the respective locations of the current and potential electrodes - the electrical resistivity of the subsurface The potential difference verifies ∆VM N = ρI K where K depends on the layout. But we want to find ρ so we’ll use 8 Figure 5: Example of a seismic record. The source is a 12-gauge shotgun recorded by an array of 24 geophones. Can you find reflected and refracted waves? Figure 6: Schematic view of an electrical prospecting layout. A and B are the current electrodes and M and N are the potential electrodes. ρ= ∆VM N K I There are several layouts that can be used, depending on the type of problem we are investigating. If we want to map resistivity at some depth, we can use a constant distance between each electrode and move the whole layout along a profile (Wenner array). Or we can choose to move the current electrodes gradually away from the centre of the layout (Schlumberger array) to obtain a resistivity-depth profile. We can also combine a large number of measurements by using electrical resistivity tomography (ERT) equipment. ERT systems have many electrodes (48 or more) and use a large number of combinations to obtain a 2D (or 3D) electrical section. These systems are now proposed by several manufacturers and so are relatively cheap and quite user-friendly. 9 Electromagnetic prospecting EM is based on the induction of electrical currents in the subsurface by EM waves. Figure 7 shows the basic principle of EM prospection. Figure 7: Generic model of EM prospection. What is happening? i. Current in the source produces a primary magnetic field Hp . ii. Hp induces secondary currents in the host (Ie ) and the target (Ic ). They increase with increasing conductivity. iii. Ie and Ic create a secondary magnetic field Hs recorded by the receiver. It is much smaller than the primary field. The function ωµσs2 is the response parameter γ. The greater γ, the greater the response of the subsurface. Note that it depends on frequency ω/2π and on conductivity σ. We also define the induction number N γ ωµσs2 = 2 2 r ωµσ N= s 2 N2 = (1) (2) Ground-penetrating radar - GPR GPR is also an electromagnetic method, but the frequencies used are so large that the EM waves propagate into the ground and only produce negligible currents. Their behaviour is akin to that of seismic waves and so the same travel-time relations can be used. The main difference is the reflection coefficient given by (at normal incidence) √ √ ²2 − ²1 R= √ √ ²2 + ²1 So contrasts in dielectric properties will produce significant GPR wave reflections. 10 Gravity and Magnetic methods Gravity (or rather microgravity for near-surface problems) detects variations of density in the subsurface by measuring the spatial variations of the earth’s gravity field. Usually, very sensitive equipment and proper positioning and levelling are necessary because the signals measured are very small. The unit for gravity measurements is often the milligal (mG) = 10−5 m/s2 , i.e. ≈ 1 ppm of the earth’s gravity or the microgal ≈ 1 ppb! Careful (and time-consuming) measurements are required! Cavity R = 1 m at Z = 5 m 0 −2 −4 g (microgals) −6 −8 −10 −12 sphere cylinder −14 −16 −18 −20 −15 −10 −5 0 5 Distance to centre (m) 10 15 20 Figure 8: Gravity anomaly caused by a cavity. The magnetic method is sensitive to magnetic induction by the earth’s magnetic field in the subsurface. Even though the magnetic field is a vector, we usually measure only its magnitude, also called total field, with a proton or cesium magnetometer. In Strasbourg, the ”normal” total field is about 47000 nanoteslas (nT). 11