Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
General Electric wikipedia , lookup
History of electromagnetic theory wikipedia , lookup
Time-to-digital converter wikipedia , lookup
Induction motor wikipedia , lookup
Electric machine wikipedia , lookup
Automatic test equipment wikipedia , lookup
Induction cooking wikipedia , lookup
Ignition system wikipedia , lookup
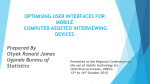
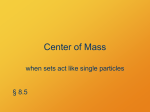
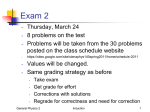
A NANOMETER PROFILING DEVICE WITH CONTACT FORCE CONTROLLED AT THE LEVEL OF MILLINEWTONS L. Yang *, Y. Gao **, and T. Xie * * Huazhong University of Science and Technology, Wuhan, Hubei, 430074, China ** Hong Kong University of Science and Technology, Clear Water Bay, Kowloon, Hong Kong E-mail: [email protected] Introduction It is known that in order to measure the surface profiles or the 3D topography, contact or noncontact type profiling devices can be considered. The non-contact type instruments are typically optical ones and rely on the reflected lights from the measured surfaces. Due to the lights being used, the non-contact profile devices are advantageous as no force is involved in the measurement. For many applications, in particular, for the micro-system applications where the steep steps and transparent thin films are involved, the non-contact profiling devices may not work effectively. In these cases, the contact profiling devices have to be utilized. Contact profiling devices utilize a contact profiling probe or a stylus to make contact with the surfaces under measurement. Inevitably, a contact force is induced. Due to the contact force, scratches may be produced on the surface and the measurement results distorted. It is clear that the contact force should be maintained as small as possible. A number of research efforts have been aimed to deliver improved stylus designs to reduce the contact force. However, due to the feature of the surfaces under measurement, the contact force would vary in a measurement process. This would make the measurement results very unstable and the uncertainty deteriorated. In order to have a high precision and a large measurement range, some research has been conducted and new probes or devices have been developed. A stepper motor [1] could be used to extend measurement range. When measuring signal exceeds measurement range, the probe moves up or down by driving motor. As a result, measuring signal changes smaller and return into the measuring range, the measuring range is enlarged. The disadvantage of this method is lower system accuracy due to lower moving precision and control precision, inconvenience of control of measuring force. Piezoelectric ceramics, glass ceramics with super-lower inflation coefficient, and capacity sensors could be used [2-4]. It adopts PI reactive control circuit to adjust measuring force. This method has higher precision, and the probe can maintain a constant tip-to-sample force. The measuring force was at 100nN approximately. The disadvantages of the design of the type were high cost, difficult to manufacture, and small measurement range. In order to solve the problem, a new profiling device with constant contact force is proposed and developed. In this device, the contact force is controlled using an inductive probe of high resolution and a voice coil servo system to reduce and to control the contact force to the level of millinewtons. The voice coil servo system and the probe are built in the device to be an integrated part of the profiling device to ensure consistent performance in a profiling process. Working Principle The structure of the proposed device is shown in Fig. 1. It consists of a voice coil motor (VCM) with a short and movable coil and an electric inductance sensor. As an executive mechanism, the VCM consists of a magnet core, a coil, a moving part, and springs. The VCM avoids the wear in a driving mechanism, has low noise, a simple structure, a high working frequency. Compared to other VCMs, the motor with short and movable coil has advantages of good dynamic response due to lighter mass of moving part and less inductance due to short moving coil. This is good to improve the dynamic stability of the control system and simplify the design of compensatory network of phase. In the profiling device, the VCM was used as a part of the servo control system used to enlarge the measurement range. 1 - installation rack 2 - framework 3 - coil of induction 4 - induction magnetic core 5 - stylus 6 - reed 7 - holding rack 8 - iron post 9 - shell 10 - alnico 11 - coil 12 - moving part 13 - nut 14 - reed Fig. 1 Structure of the profiling device The stylus is connected to the magnet core of the electric inductance through two reeds installed on holding rack. When the stylus moving through the measured surface, at the same time, through two reeds installed on holding rack, stylus pulls magnet of inductive sensor to move, displacement signal is generated. This signal is transmitted to processing circuit of electric inductance. In order to improve measurement accuracy, electric inductance should be high precise and should work in very little and linear range. Usually, the measurement range of electric induction should be smaller than 3µm according to the precision profiling device required. The VCM consists of coil, magnet, alnico, iron post, moving part, etc. The coil of this motor used in the profiling device is movable and short. Electric induction sensor is installed at the bottom of the framework of the VCM. In order to extend the measurement range of the device, the holding rack and the electric induction, connected with holding rack, are connected with the moving part of VCM. The moving part of the motor is connected with two reeds installed on installation rack. In addition to the structure as the above, other types of structures can be used. For example, the VCM can have a long coil. Other sensors, such as a differential transformer or a capacity displacement sensor, could be used, although the precision may be affected. No matter which structure used, the moving part of VCM must be connected with moving part of electric induction or differential transformer. The sensor used in this profiling device must have high precision, little measuring range as small as possible, fine linearity. The enlargement of measuring range must be conducted by driving moving part of VCM up or down. In addition, the electric induction or capacity displacement sensor must be working in very little measuring range in order to improve resolution of profiling device. The holding rack and electric induction sensor are connected with moving part of VCM. When voltages are applied to the coil of the motor, the moving part will be located at corresponding position due to magnetic force. As a result, the force between the stylus and workpiece will vary. When the moving part moves, it drives the holding rack up and down. Therefore, the electric induction sensor would be moved up or down. Signal processing Signals of the electric induction are transmitted to a computer after they are processed by the signal processing circuit, and converted by the A/D converting circuit. The signal processing circuit is required for high stability, lower electric noise, and high resolution. When the magnet of electric induction located at the predetermined limit position, the voltage input of signal processing circuit is also a predetermined voltage, such as 1-4V. The output of A/D converter is also a predetermined value near to LSB and MSB of A/D converter. When measuring a workpiece, if displacement varies in measuring range of electric induction, the moving part of the motor will not be adjusted. When the output of A/D converter exceeds predetermined value, the voltage applied to coil of VCR will be adjusted through D/A converting circuit. As a result, the moving part will be driven up or down. Making use of a digital PID control algorithm, the adjustment value of the moving part is determined by the computer, according to the voltage applied to the coil of the VCM. Therefore, the electric induction will work in the pre-determined measurement range. The measurement force will be adjusted. Because the measuring force of the profiling device can be known by a computer from the value of A/D converter and the moving part of the motor may be adjusted, the measuring force between stylus and surface of workpiece can be adjusted to the level of millinewtorns, due to using the PID feedback algorithm, and can be maintained almost at a constant value. Therefore, the stylus would not damage the surface of a workpiece. There are a number of error sources in this profiling device. The friction on the magnet, the damping of the reeds, the fluctuation of voltage, magnetic lag of the VCM, resolution and instability of the electric induction sensor are the typical error sources. The magnetic lag is an important factor. There is a hysteresis error between the moving parts of VCM moving up and down. In order to solve the problem, the VCM position must be calibrated with high precision. Applications The proposed profiling device has been used in a measurement system to trace marks on bullets for forensic investigations (Fig. 2). Typical measurement results are as shown in Fig. 3. The application required a measurement range at least at 200µm. In addition, good longitudinal and lateral resolutions were required. In the measurement system, the probe responsible for the contact force control was set to a 10µm range to ensure a sensitivity level necessary for the application. Due to the use of a high stability signal processing circuit, the signal of the probe output could be controlled within 1mV. The probe output was used as feedback signal to control the voice coil servo system to reduce the measurement force. As a result, the indention of the probe was controlled to be less than 5µm, and the measurement force was estimated to be at the 0.0lmN level, at least at the level of millinewtons. In a series of experiments, measurement marks could not be traced using a 40x optical microscope. The resolution of the profiling device was 10nm, and the measurement range was up to 2mm. The proposed profiling system can be a good supplement for high precision, low cost profiling applications. Fig. 2 A system utilizing the profiling device Fig. 3 Measurement results of the system Conclusions A profiling device with a resolution of 10nm and a measurement range up to 2mm has been developed. The device should have a precision better than 0.1µm. It has been used successfully in a demanding measurement application. In this device, an inductive probe of high resolution and a voice coil servo system were used to achieve millinewton level measurement forces. The device has a simpler structure and is easy to use and manufacture. References [1] Chuard, M., Mignot, J., Nardin, P., and Rondot, D., 1986, Range expansion and automation of a classical profilometer, Journal of Manufacturing Systems, 6(3), pp. 223-230. [2] Howard, L. P., and Smith, S. T., 1992, Long range constant force profiling for measurement of engineering surfaces, Review of Science Instrument, 63(10), pp. 4289-4295. [3] Chetwynd, D. G., Liu, X., and Smith, S. T., 1996, A controlled-force stylus displacement probe, Precision Engineering, 19(2-3), pp. 105-111. [4] Howard, L. P., and Smith, S. T., 1994, A metrological constant force stylus profiler, Review of Science Instrument, 65(10), pp. 892-902.