Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
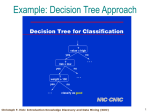
NGRI Nanometrics Taurus Hardware & Software Training Presented by: Kevin So [email protected] 1-Week Agenda Mon, Aug 15: Taurus Introduction, Hardware and Software overview Tue, Aug 16: Taurus configuration Wed, Aug 17: Taurus Field Deployment and data collection Thu, Aug 18: Taurus Field Deployment, data retrieval & analysis Fri, Aug 19: Taurus Review Introduction Outline 1. What is a Taurus? 2. Mechanical Specifications 3. Environmental Specifications 4. Electrical Specifications 5. System Architecture What is a Taurus? Broadband Seismometer (Trillium 240) Data Acquisition Server (NAQS) Portable Digital Seismograph (Taurus) Geophone (Mark L-4) Data Analysis What is a Taurus? ● All-in-one, handheld, seismograph. ● Truly portable. ● User friendly. ● Low power, 650mW capable. ● CF or ATA disk drive recording media. ● Linux OS ● Web browser user interface. ● IP communications. Mechanical Specifications ● Machined aluminum case construction. ● Weight: 1.8 kg. ● 3.5” Colour LCD (320 x 240) ● IP-67 Compliant (with connector caps on). ● Multi-colour status indicator LED. ● Scratch and chip resistant finishing. ● Keyed connectors to prevent wrong cable plug-in. Environmental Specifications ● ● Operating Temperatures (w/o insulation) With Compact Flash media: -20o C to 60o C With IDE disk drive media: 5o C to 55o C Humidity: 0-100% non-condensing Electrical Specifications ● Sensor Inputs Channels: 3 channels (user configurable) Input voltage range: 40 V peak-to-peak differential Hardware Gain: 0.4, 1, 2, 4, 8 (user configurable) Software Gain: 0.001 to 100 (user configurable) High Pass Filter: user configurable Electrical Specifications ● Sensor Control Sensor Type: Active or Passive Power support: 9 – 36V DC Power on/off: user selectable Short circuit protection Control lines: 6 user configurable (logic levels) Supporting Mass lock/unlock, mass center, cal enable, etc. Electrical Specifications ● Digitiser Performance Dynamic range: > 138 dB Sampling rates: 10, 20, 40, 50, 80, 100, 120, 200, 250 Hz Electrical Specifications ● Calibration Output Signal output: sine wave, pulse signal, pseudo-random binary Mode: voltage or current Initialization: user interface Electrical Specifications ● Timing System Internal VCXO clock disciplined to GPS Timing accuracy < 100 μS GPS Receiver: 8 channels GPS Antenna: external, weatherized, with 5 m cable Duty Cycle: user configurable Electrical Specifications ● State-Of-Health Instrument SOH: voltage, mass position, GPS status, instrument temp. User SOH: 4 external user accessible SOH channels Logging: configuration changes, software messages Electrical Specifications ● Data Storage Removable media: Compact Flash or 1.8” ATA disk drive. Capacity support: ● Compact Flash 1-8 GB. ● IDE disk drive 20-60 GB. Duration: > 600 days of 3 channels @ 100 sps w/40 GB ATA disk drive. Recording mode: continuous ringbuffer. Storage Format: Nanometrics STORE. Data Extraction: streaming and miniSEED Electrical Specifications ● Communications Interfaces: 10/100 Base-T Ethernet, RS-232 serial. Protocols: UDP/IP (unicast/multicast), HTTP, RS-232 with IP drivers. Electrical Specifications ● Power Input range: 9 to 36 V DC. Protection: fuseless design, reverse polarity, short circuit. Low voltage disconnect: user configurable. Power Consumption: ● Ultra low: 0.650W @ 12V, buffered mode with CF ● Low: 1.1W @ 12V, buffered mode with IDE disk drive ● Mid: 1.5W @ 12V, communications mode, ethernet or serial ● High: 3.5W @ 12V, communications mode, LCD, configuration System Architecture System Architecture ● Analog Processor (TAP) ● Digital Processor (TDP) ● DSP, filtering, GPS engine, timing Control Processor (TCP) ● 3 channels 24-bit data channels, calibration circuit Linux OS, 128 MB RAM, 64 MB Flash, comms. interface, java based code Backplane (TBC) connectors, internally soldered System Architecture Hardware Overview 1. Connector Overview 2. Button Layout and Functions 3. Status LEDs 4. Installing Removable Media 5. Powering up 6. Powering down 7. Accessing the Taurus Connector Overview • • • • 7 external MIL spec connectors. 1 internal, behind the media door. All connectors are keyed and are different in sizes. No duplicate connectors. Connector Overview… NMXbus SOH Ethernet Serial/USB Power GPS Sensor Antenna Connector Overview… ● Sensor Connector 26-pin female mil circular A B R CH2+ CH1_GND Primary data channels Sensor control lines Switchable sensor power CH3_GND C P T S CH2_GND CH2- CH1D U SEN_RET CHGND V SEN_V- c DGND CH3+ CAL1+ Z M CAL1-/CTRL4 CAL2+ Y X CTRL2 SEN_V+ N CAL2-/CTRL5 W F a b CH1+ E CH3- L CAL3-/CTRL6 CAL3+ SEN_SOH2 K G CTRL3 H J CTRL1 SEN_SOH3 SENSOR FEMALE SEN_SOH1 Connector Overview… ● Sensor Connector Connector Overview… ● GPS Antenna TNC female Active antenna (3.3V) A GPS_ANT GPS ANTENNA FEMALE Connector Overview… ● Power 3-pin male mil circular 9-36 VDC C A BAT - BAT + B EART H POWER MALE Connector Overview… ● Serial/USB 19-pin female mil circular Serial ports 1 & 2 USB (5V, 100mA) B A M S1-DTR Power + Power - C P N S1-DSR S1-RX S1-TX D R S1-CTS S1-RI E L V U S_GND S S1-RTS K USB_D+ USB_VBUS T J S1-DCD S2_RTS/ USB_D- USB_GND GP_OUT_1 F G H S2-RX S2-TX S2-CTS USB/SERIAL FEMALE KEYING: W Connector Overview… ● Serial/USB Connector Overview… ● Ethernet 4-pin female mil circular Supports 10/100 Base-T Auto-Sensing D Rx+ A T x+ C Rx- B T x- ETHERNET FEMALE KEYING: W Connector Overview… ● SOH 7-pin female mil circular 4 analog SOH inputs A B SOH 2 C SOH 3 SOH 1 G SOH REF D SOH 4 3.3V @ 10mA power output USER SOH FEMALE F PWR - E PWR + Connector Overview… ● NMXbus 4-pin male mil circular Provides data and power Allows daisy chaining A D BUS SUPPLY SHIELD BUS RTN TERMINATION B C NMXbus MALE Connector Overview… ● Mini USB Behind media bay door Type B 1 2 3 4 5 MINI USB (TYPE B) MALE 5-Button Layout and Functions Move Up (moves through options in drop down menu) Enter Shift-Tab (back one field/link) Tab (next field/link) Move Down (moves through options in drop down menu) Taurus Navigation: Menus 5-button pad Taurus Navigation: Fields/Links 5-button pad Status LEDs ● 4 status LEDs 2 for Unit Status 1 for Ethernet connection / activity 1 for Media Access status Unit Status Unit Status Ethernet Status Media Status Status LEDs… Unit Status LED: Off – Digitiser is powered off. Solid Red – Digitiser is booting up. Normal conditions to capture data: Fast Blinking Green – GUI is starting up. Slow Blinking Green – normal operation. Fast Blinking Orange – power up, unit boot up. Warning conditions: Slow Blinking Orange after power up – media door open, low battery, poor GPS timing. Status LEDs… Critical Fault Status: Fast Blinking Red – fault preventing normal operation. ● Disconnected GPS ● Missing media ● Hardware problem ● Software problem Status LEDs… ● Ethernet Status LED Off – processor is powered down. Orange – processor is booting. Blinking Green – network configured, carrier detected. Blinking Orange – network is not configured. Blinking Red – network is configured, no carrier detected. Status LEDs… ● Media Access Status LED Off – media door closed or pressed in. Green – removable media (CF/IDE) can safely be removed. Red – removable media is mounted, in write mode, DO NOT remove. Installing Removable Media ● Always power down the Taurus Processor before adding, removing or changing the media (CF/IDE). You may lose data if the media is removed while the Taurus Processor is running. You may lose data if the media is not inserted before the buffer fills-up. Installing Removable Media… 1. Lift the plastic lever on the media door. 2. Twist the door knob counter clockwise to the unlocked position (lever is vertical). 3. Flip the lever flat against the door, allowing the handle to push against the chassis and causing the door to pop free/open. Installing Removable Media… ● ● ● Make sure Media Access LED is green OR the power is off. Gently pull on the end of the CF/IDE to remove it. Gently insert the replacement CF/IDE. Inserting Removable Media… ● ● ● Place and push the media door in place. Twist the knob clockwise to the locked position (horizontal). Flip the black plastic lever down as to lie flat against the door as shown. Powering Up ● Basic Steps: 1. Connect the GPS, sensor and ethernet cables (if applicable). 2. Connect the power cable (9-36 V DC). 3. Wait for the Taurus processor to boot up (~1 minute). LCD will be off, Unit Status LEDs will show status. 4. Once the Unit Status LEDs are blinking green or orange, you may start the GUI. 5. Press the center button (Enter key) for about 2 seconds. Starts web browser GUI, and LCD (~1-2 minutes). Powering Down ● Do not just disconnect the power cable! ● Basic Steps: 1. Go to Shutdown page from the web browser’s drop down menu. 2. Select the Shutdown option. 3. Wait for all status LEDs to be turned off to indicate the processor has been shut down. 4. Disconnect the Taurus power cable. Accessing the Taurus ● ● From external web browser: 1. Connect the Taurus using the ethernet cable (15228) to your LAN or computer directly. 2. Open your browser and go to the Taurus URL: http://Taurus.IP.Address. The IP address of the Taurus is shown on the Current Status Page of the internal browser. Software Overview 1. Software Introduction 2. Software Modules 3. Modes of Operation 4. Data Organization 5. User Interface 6. Taurus Configuration 7. Real-time Data Access 8. Data Downloading 9. Software Uploading 10. System Security Software Introduction ● First true internet device for the seismic market. ● Web server based data acquisition system. ● “Thin client” approach, no special software required to interact with the Taurus. ● A networked Taurus can be accessed from anywhere in the world! ● Linux based operating system. Modes of Operation ● Two modes of operation: buffered or communications. ● Buffered: ● Stand alone, unattended continuous data recording, no comms. Lowest power consumption. ADC/DSP acquires data into internal flash memory buffer. Linux Processor is powered on to write to removable media when buffer is near full capacity. Processor powers back down until next write event. Communications: Continuous write to removable media. Taurus and data are accessible via ethernet or serial ports. Streaming to data acquisition server capable. Software Modules ADC DSP LINUX Storage Web WebBrowser Browser GPS GPS ADC ADC DSP/ARM DSP/ARM Acquisition Acquisition Server Server Compact flash or ATA disk Embedded software watchdog LINUX sofwtware watchdog Data Organization ● Data types: waveform, SOH, configuration, etc. ● Next generation NAQS: STORE system. ● Open database system, with STORE objects. ● STORE object combines waveform, SOH and config data for a given time period – all in a single file. ● Waveform data is stored in 1st difference Steim format. ● SOH & config data are stored in XML/RDF. ● STORE uses URL as primary index. ● Data is self describing (where, when, whom). User Interface ● On-board colour LCD. ● 5-button navigation. ● Access to acquisition system via web browser: Real-time waveform data. SOH data. Configuration information. Calibration commands. Taurus Configuration ● All data types are recorded by default. ● Minimal configuration required to get data recording started. ● Units can be configured individually. ● Units can have its configuration uploaded as an XML file. ● All configuration changes are logged to the STORE for traceability. Accessing real-time data ● 2 protocols: UDP/IP or HTTP. ● UDP/IP: ● Broadcasts data packets to an unicast or multicast IP address. HTTP: Uses a TCP/IP socket and HTTP between Taurus and receiving software. HTTP allows POST and GET commands to/from Taurus. HTTP is implemented in all web servers/browsers. Data Downloading ● Request for specific data segments via web interface or HTTP commands. ● Request for: waveform data, SOH and config. ● Option to directly extract data into miniSEED. ● ● All resources available to the web browser can be accessed directly from customer developed software. Standard HTTP protocols and URL. System Security ● Linux operating system. ● User and password protection for all IP service access. ● Accounts and access rights. ● Full implementation in Taurus Version 2.0 Taurus Menus Overview 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. Main Menus Menu Map Status Page Waveform Page SOH Page Timing Page Sensor Page GPS Satellites Page GPS Map Page Data Availability Page 11. Data Retrieval Page 12. Configuration Page 13. System Info Page 14. Factory Settings Page 15. Shutdown Page Main Menus ● Main menu pages: Current Status Waveform SOH Timing Sensor GPS Satellites GPS Map Data Availability Data Retrieval (ext. browser only) Configuration System Info Factory Settings Shutdown Menu Map Taurus UI Current Status Timing Waveform SOH Timing Sensor Calibration Menu Map… Taurus UI GPS Satellites GPS Map Menu Map… Taurus UI Data Availability (Month Display) Text version Data Daily Display Other Taurus Store 1 Taurus Config Taurus Store 2 ARM Log Taurus Store 3 DSP Log PPC Log ARM SOH PPC SOH Week Display Menu Map… Taurus UI Data Retrieval (External Browser) Time Series State of Health System Logs System Configuration Channel Data Download Pages SOH Data Download Pages Log Data Download Pages Config. Settings Download Pages Menu Map… Taurus UI Configuration Sampling Calibration Sensor Storage Menu Map… Taurus UI System Info Firmware Upload Power Manager Hardware Menu Map… Taurus UI Factory Settings General Networking Storage Naming Advanced (Sequence #) Stream to NAQS Advanced (volume size) Sensor & Timing Power Calibration Sensor Digitizer Main Advanced (DC Removal) Front End Control Lines Advanced (software gain, dither) Display Thresholds Timing Menu Map… Taurus UI Shutdown Turn Off Display Restart Shutdown Main Menu: Status Page ● Default startup page. ● Indicates Taurus status. ● % of store used ● Days of store remaining ● # of channels, sampling rate ● IP address ● Voltage, power consumption ● Waveform ● Fault Indicators Main Menu: Waveform Page ● Near real-time seismic data. ● View duration 5-120s. ● Scale selectable from 10e6 to 2 counts. ● Auto scaling option. ● Pause. ● Option to view individual channel waveform. Main Menu: SOH Page ● Displays state-of-health info. ● Unit internal temperature. ● Input voltage. ● NMXbus voltage. ● ● Power consumption by subsystems. Voltage levels on external/user SOH channels. Main Menu: Timing Page ● Displays timing information. ● PLL state. ● Current UTC date & time. ● Time quality. ● GPS engine status. ● Location information. ● # of satellites acquired. Main Menu: Sensor Page ● Provides sensor controls and commands. ● Mass: Center, Lock/Unlock. ● Power to sensor. ● Sensor sensitivity. ● Calibration commands. ● Calibration setup. Main Menu: GPS Satellites Page ● GPS Satellite information. ● Satellite ID. ● Satellite status. ● Elevation angle. ● Azimuth. ● Signal Strength (in Antenna Measurement Unit). Main Menu: GPS Map Page ● ● Provides a GPS Skyplot! Graphical display of visible satellites and their signal strengths. Main Menu: Data Availability Page ● ● ● Graphical & text summaries of available data segments based on time. Quick overview (monthly, weekly, daily). Default monthly view of all 3 time series channels. ● Display data and time gaps. ● Data Gap = missing data. ● Time Gap = time jump but no missing data. Main Menu: Data Retrieval Page (Ext. browser) ● Allows the user to download any of the four types of data (waveform, SOH, logs & configuration). Main Menu: Configuration Page. ● ● Configure digitiser sampling rate & Taurus operating mode. Configure calibration information. ● Configure storage. ● Make STORE read only. ● Upload configuration file (w/ext. browser only). Main Menu: System Info Page ● ● Provides firmware and hardware information. Hardware sub-assembly revisions. ● Firmware versions. ● Upload & Download. Main Menu: Factory Settings Page ● From here, you can configure all Taurus settings! ● General: LCD time out. ● Networking: IP address. ● Storage: Media type & size. ● Sensor & Timing: control lines. ● Digitizer: sampling, input range. Main Menu: Shutdown Page ● Turn off display, ● Restart, ● Turns off LCD. necessary for certain configuration changes. Shutdown, Powers down the processor, to switch media or to deploy for data collecting. Exercises 1. Taurus start-up 2. Switching Media 3. Taurus shut-down 4. System Status