Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Lift (force) wikipedia , lookup
Hooke's law wikipedia , lookup
Specific impulse wikipedia , lookup
Relativistic quantum mechanics wikipedia , lookup
Equations of motion wikipedia , lookup
Center of mass wikipedia , lookup
Relativistic mechanics wikipedia , lookup
Newton's laws of motion wikipedia , lookup
Mass versus weight wikipedia , lookup
Centripetal force wikipedia , lookup
Classical central-force problem wikipedia , lookup
Work (physics) wikipedia , lookup
Biofluid dynamics wikipedia , lookup
Reynolds number wikipedia , lookup
Lorentz force velocimetry wikipedia , lookup
D-BSSE
Prof. D. Iber
Spatio-Temporal Modeling in Biology
AS2016
Solution: Exercise Set 7
1.
Navier Stokes Equation to model Tissue Growth
i) Based on the 3 basic principles of conservation of mass, conservation of momentum and conservation
of energy, a continuity equation may be derived via the Reynolds transport theorem.
The sum of the changes of some intensive property (φ) defined over a control volume Ω must be equal
to what is lost (or gained) through the boundaries of the volume plus what is created/consumed by
sources and sinks inside the control volume.
d
dt
Z
Z
φ dV = −
Ω
Z
φu · n dA −
∂Ω
s dV
(1)
Ω
u: flow velocity of the fluid
s: the sources and sinks in the flow, taking the sinks as positive
Ω represents the control volume and ∂Ω its bounding surface.
The divergence theorem may be applied to the surface integral, changing it into a volume integral:
Z
Z
Z
d
φ dV = −
∇ · (φu) dV −
s dV.
(2)
dt Ω
Ω
Ω
Applying Leibniz’s rule to the integral on the left and then combining all of the integrals:
Z
Z
Z
∂φ
dV = −
∇ · (φu) dV −
s dV
Ω ∂t
Ω
Ω
Z ∂φ
⇒
+ ∇ · (φu) + s dV = 0.
∂t
Ω
(3)
(4)
The integral must be zero for any control volume; this can only be true if the integrand itself is zero,
so that:
∂φ
+ ∇ · (φu) + s = 0.
(5)
∂t
A general momentum equation is obtained when the conservation relation is applied to momentum.
If the intensive property φ considered is the mass flux (also momentum density), i.e. the product of
mass density and flow velocity ρu, by substitution in the general continuum equation:
∂
(ρu) + ∇ · (ρuu) = f
∂t
(6)
which corresponds to
u
∂ρ
∂u
+ ∇ · (ρu) + ρ
+ u · ∇u = f
∂t
∂t
(7)
The leftmost expression relates to the conservation of mass
∂ρ
+ ∇ · (ρu) = S
∂t
(8)
where ρ is the mass density (mass per unit volume), u is the flow velocity.
S is a mass source. Typically, S = 0. However, in tissue models S 6= 0 in case of growth.
In case of incompressible fluids
∂ρ
∂t
= 0 and ∇ρ = 0.
The second term corresponds to the fluid density times its acceleration. Thus, for a velocity v of the
fluid, the acceleration at a fixed point in space is ∂v
∂t . However, we also need to take into account
velocity changes because of translocations such that the acceleration is given as
∂v
∂v
∂v
∂v
∂v
+ vx
+ vy
+ vz
=
+ (v · ∇)v
∂t
∂x
∂y
∂z
∂t
1
(9)
such that the fluid acceleration is given by
∂v
+ (v · ∇)v .
∂t
(10)
According to Newton’s law, mass times acceleration is equal to the force on that particular volume
element.
ρ
∂v
+ (v · ∇)v
∂t
=
m × acceleration
F
=
= f.
V
V
(11)
When liquids are at rest, there are no shear forces (not even for viscous fluids). The law of hydrostatics, therefore, is that stresses are always normal to any surface inside the fluid. The normal force
per unit area is called the pressure.
Since there is no shear in a static fluid, it follows that the pressure stress is the same in all directions.
The pressure in a resting fluid may, however, vary from place to place such that we have pressure p
∂p
dx at x + dx such that the resulting force is given by
at x and pressure p + ∂x
∂p
∂p
F = p− p+
dx
dydz = − dV
(12)
∂x
∂x
and the force density per unit volume as
f=
F
= −∇p.
V
(13)
In a dynamic situation, shear stress can build up in a viscous fluid. If the coefficient of dynamic
viscosity is constant we have
1
f = −∇p + µ(∆u + ∇(∇ · u)) + fext .
3
(14)
In the most general form (for compressible fluids) we have
∂ρ
∂u
1
u
+ ∇ · (ρu) + ρ
+ u · ∇u = −∇p + µ(∆u + ∇(∇ · u)) + fext
∂t
∂t
3
In case of incompressible flow
∂ρ
=
∂t
∇ρ =
1
∇(∇ · u)
3
=
0
0
0
Tissue can be treated as an incompressible fluid with fluid density ρ, dynamic viscosity µ, internal
pressure p, and fluid velocity field u. Tissue can then be described by the Navier-Stokes equation:
1
ρ (∂t u + (∇ · u) u) = −∇p + µ ∆u + ∇ (∇ · u) + f
3
ρ∇ · u = ωS
(15a)
(15b)
where ωS denotes the local mass production rate, which is composed of contributions from proliferation,
h Sprol
i , and increase in cell volume by cell differentiation, Sdif f . ω is the molecular mass of
cells,
kg
mol
.
f denotes the external force density and may e.g. originate from cellular structures which exert
force on the fluid.
2
1
ρ (∂t u + (∇ · u) u) = −∇p + µ ∆u + ∇ (∇ · u) + f
|
{z
} | {z }
3
| {z } |{z}
2
5
1
4
|
{z
}
3
ρ∇
· u} = |{z}
S
| {z
6
7
(16)
(17)
Momentum equation: 1 material derivative of the velocity field; 2 force induced by pressure
gradient; 3 viscous force = diffusion of momentum; 4 bulk viscosity contribution; 5 external
body forces. 6 divergence of the velocity field; 7 local mass source.
ii) S is a mass source. Typically, S = 0. However, in tissue models S 6= 0 in case of growth. Proliferating
cells may divide, which is modelled as a local mass source Sprol . As a result of differentiation, the
cells increase in volume and lead to a local mass source Sdiff . Both mechanisms induce a velocity
field u in the fluid.
In the Navier-Stokes equation:
1
ρ (∂t u + (∇ · u) u) = −∇p + µ ∆u + ∇ (∇ · u) + f
3
ρ∇ · u = ωS
(18a)
(18b)
ωS denotes the local mass production rate, which is composed of contributions from proliferation,
Sprol , and increase in cell volume by cell differentiation, Sdif f .
iii) In the most general form (for compressible fluids) we have
∂u
1
∂ρ
+ ∇ · (ρu) + ρ
+ u · ∇u = −∇p + µ(∆u + ∇(∇ · u)) + fext
u
∂t
∂t
3
In case of incompressible flow
∂ρ
=
∂t
∇ρ =
1
∇(∇ · u)
3
=
0
0
0
Tissue can be treated as an incompressible fluid with fluid density ρ, dynamic viscosity µ, internal
pressure p, and fluid velocity field u. Tissue can then be described by the Navier-Stokes equation:
1
ρ (∂t u + (∇ · u) u) = −∇p + µ ∆u + ∇ (∇ · u) + f
3
ρ∇ · u = ωS
(19a)
(19b)
iv) Reynolds number:
Re =
L·U
< 10−3 .
ν
with characteristic length scale L ∼ 10−3 m
−3
−3
and characteristic speed U = 10
m/s.
3.6s m/s = 0.3 × 10
v) After non-dimensionalization, the Navier-Stokes equation (19a) reads (for the now non-dimensional
variables u and p)
1
Re (∂t u + (∇ · u) u) = −∇p + ∆u + ∇ (∇ · u) .
(20)
3
Since Re is very small, the left hand side of equation (21) can be neglected, resulting in the wellknown Stokes equation for creeping flow of an incompressible fluid
0 = −∇p + ∆u.
3
(21)
vi) For a uniform source
∇u = S
the pressure is uniform and determined by the boundary conditions.
2.
Elastic materials
i) The key differences between the behaviours of solids and fluids lies in how they respond to the
application of a force.
Elastic Solids: The deformation is independent of the time over which the force is applied. The
deformation disappears when the force is removed.
Viscous Fluids: A fluid continues to flow as long as the force is applied. A fluid will not recover its
original form when the force is removed.
ii) According to Hooke’s law, the force F needed to extend or compress a solid bar (spring) by some
distance ∆l is proportional to that distance. That is,
F ∝ ∆l.
(22)
The lengthening ∆l of the bar will also depend on its length l. Thus, if the same forces act on each
of two blocks that are put together, each will stretch by ∆l. We thus see that we must have
F ∝
∆l
.
l
(23)
iii) Stress: When a piece of tissue experiences a force from a neighboring tissue region, mechanical stress
(σ) is defined as the ratio of the force (F ) to the area of contact (A) with that region.
Deformation (also called ’strain’) is the relative change in size of an object subjected to a force. In
one dimension, it is a dimensionless number, : the fraction of change in the object length (where
L is the new length and L0 the original length), which would be positive for elongation or negative
for contraction.
The force will also depend on the area of the block, and must be proportional to the cross-sectional
area A (imagine to blocks side by side that are deformed by ∆l). We then have
∆l
,
l
where Y is the Young modulus. We can rewrite this as
F =YA
F
∆l
,
=Y
A
l
|{z}
|{z}
stress
(24)
(25)
strain
iv) When one stretches a block of material in one direction, it contracts at right angles to the stretch.
We thus have for homogeneous, isotropic materials
∆w
∆h
∆l
=
= −σ ,
w
h
l
where w and h refer to the width and height of the bar, and σ is called Poisson’s ratio.
(26)
Finally, since we are in a linear regime, we can use superposition, i.e. so forces and their effects are
additive.
For incompressible materials σ = 0.5, which means that the displacement in the vertical directions
is exactly equal to the displacement in the horizontal direction. This means volume is conserved
which is the definition of incompressible.
3.
Fluid-Structure Interactions
i) For ∆p0 = 0 and β =
r
r0
=
5.5µm
5µm
= 1.1:
∆p
=
=
≈
4Eh0 β − 1
r0
β4
4 · 400P a · 100nm 1.1 − 1
·
5µm
(1.1)4
0.055P a
4
(27)
(28)
(29)
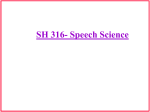
Figure 1: Relation between ∆p and β. Initially the pressure difference rises as r increases, then the
thinning effect dominates and the pressure difference declines again.
ii) As r increases, the pressure difference ∆p rises initially. Since the thickness of the elastic material
h decreases as it is incompressible, the pressure difference ∆p decreases again when the thinning
effect dominates, which facilitates expansion (see Figure 1). This also applies when blowing into a
balloon: It is tough at the beginning but then it gets easier because the thinning effect dominates.
5