Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Factorization of polynomials over finite fields wikipedia , lookup
Proofs of Fermat's little theorem wikipedia , lookup
Mathematics of radio engineering wikipedia , lookup
Elementary mathematics wikipedia , lookup
System of polynomial equations wikipedia , lookup
Advanced Math: Notes on Lessons 118-121
David A. Wheeler, 2008-04-07
Lesson 118: Roots of Polynomial Equations
(This lesson is essentially a continuation of 117B, the rational root theorem)
Sometimes you can solve higher-degree polynomial equations through two steps: (1) use the rational root
theorem (lesson 117) to find some of the roots, (2) divide the original equation by each of the (x-root)
values that you found, and then (3) solve what’s left over.
For example, given:
x3-10x2+33x-34 = 0
The rational root theorem says that if there are rational roots, they must be in this set:
±1,2,17,34
1
If x=1, x3-10x2+33x-34 = 13-10(1)2+33(1)-34 = -10, which isn’t zero, so it’s not a root.
If x=2, x3-10x2+33x-34 = 23-10(2)2+33(2)-34 = 8-40+66-34 = 0, so it’s a root!
This means that you can factor the original polynomial with (x-2). Since you can, divide the original
polynomial by (x-2), and you end up with: x2-8x+17. Now it’s down to second-degree, which you know
how to solve.. just use the quadratic equation:
x=
−b± b2−4ac
2a
and you’ll find x = 4+i, 4-i.
So the entire factored polynomial is:
x3-10x2+33x-34 = (x-2)(x-4-i)(x-4+i)
and the original equation is the same as:
(x-2)(x-4-i)(x-4+i) = 0
Lesson 119: Descartes’ Rule of Signs / Upper and Lower Bound Theorem /
Irrational Roots
Descartes’ Rule of Signs
If you write a polynomial in its usual unfactored form (sorted from the largest to smallest exponent), you
can quickly count the number of “sign changes” in the nonzero coefficients. For example, in:
3x6 - 3x5 + 2x4 - 5x2 -x + 4 = 0
there are 4 sign changes: from 3x6 to -3x5, from -3x5 to +2x4, from +2x4 to -5x2, and from -x to +4.
Notice that the zero-valued coefficients (such as the missing x3) are irrelevant for this rule.
Descartes’ rule of signs says that “the number of positive real roots of a polynomial equation with real
1 of 7
coefficients equals the number of sign changes minus 0 or a positive even number (2, 4, ...)”.
You can also use this to find the largest possible number of negative real roots by calculating p(-x), i.e.,
replacing all the “x”s with “-x”. This has the effect of flipping the sign of all the coefficients with odd
exponents.
For example, if p(x)= 3x6 - 3x5 + 2x4 - 5x2 -x + 4, then p(-x) = x6 + 3x5 + 2x4 - 5x2 +x + 4.
Thus, Descartes’ rule of signs also says that “the number of negative real roots of a polynomial equation
p(x) with real coefficients equals the number of sign changes in p(-x) minus 0 or 2 or 4 or ...”.
Upper and Lower bound theorem
The “region of interest” approach (lesson 116) sometimes doesn’t give enough information on where the
zeros of the polynomial (the roots of the equation) are; the “upper and lower bound theorem” may be able
to give a narrower answer. This only works if the polynomial has real coefficients.
For an “upper bound”, repeatedly pick positive values (usually you’d use integers) and use synthetic
division (lesson 113). If the nonnegative numbers in the bottom row are all-positive or all-negative, then
there is no real root larger than that divisor. Beware: if both positive and negative values result, it’s still
possible that there is no real root larger than that divisor. In other words, the inverse isn’t necessarily
true. (The Saxon book doesn’t make that clear at all.)
You’ll need to do a little searching to find the integer x where this is true, and where it’s not true for x-1;
at that point, x is the smallest integer upper bound that this theorem can find.
Let’s try this with the following polynomial:
x4-3.5x3-37x2+42.5x+75
First, let’s see if 4 is larger than all the roots, using synthetic division:
4
1
1
-3.5
-37
42.5
75
4
2
-140
-390
0.5
-35
-97.5 -315
This didn’t work; we have both positive and negative numbers. Note the the final bottom-right value is
nonzero, so 4 isn’t a root either. Let’s try again, with 8:
8
1
1
-3.5
-37
42.5
75
8
36
-8
276
4.5
-1
34.5
351
We still have both positive or negatives, but they’re fewer - we may be getting close. Now, it turns out
that in this example, the largest zero of this polynomial is 7.5, and so 8 actually is larger than any zero.
This theorem didn’t catch that. I want to emphasize this because the Saxon book doesn’t make it clear:
There’s no guarantee that this theorem will find the smallest real-life integer upper bound, just that it will
find some bounds.
Continuing with our example, 8 didn’t work, so let’s try 9:
2 of 7
9
1
1
-3.5
-37
42.5
75
9
49.5
112.5 1395
5.5
12.5
155
1470
We know 9 is not a zero, because we have a nonzero remainder in the synthetic division. But we have
all-positive values at the bottom, so we know for sure that all the (real) zeros have values of 9 or less.
We didn’t get that result with 8, so among the integers, 9 is the smallest upper bound we can find using
this method. And since 9 isn’t a zero, we know that all real zeros are less than 9.
There’s a similar rule for a lower bound. Again, use synthetic division, but use negative numbers
(usually integers) as the synthetic divisors. A divisor is smaller than any real root if the synthetic
divisor’s bottom row has alternating signs; zero can be considered “either sign” for this purpose.
Let’s try -4:
-4
1
1
-3.5
-37
42.5
75
-4
30
28
-282
-7.5
-7
70.5
-207
This doesn’t alternate; -7.5 is followed by -7, and both are negative. Let’s try -6:
-6
1
1
-3.5
-37
42.5
75
-6
57
-120
465
-9.5
20
-77.5 540
This does alternate - which means that there are no roots smaller than -6. But perhaps we can find a
smaller value that will work - we haven’t tried -5 yet. So let’s try that:
-5
1
1
-3.5
-37
42.5
75
-5
42.5
-27.5 -75
-8.5
5.5
15
0
We have a remainder of 0, so this is a zero!! We don’t have alternating signs, so we don’t know for sure
if there are smaller zeros or not. So this approach would report that the zeros are between -6 (lower
bound) and 9 (upper bound).
By the way, I created this example by first deciding where I wanted the roots; once I’d done that, I then
wrote the polynomial in factored form:
(x-7.5)*(x-2)*(x+1)*(x+5)
3 of 7
I then multiplied it out, which is of course:
x4-3.5x3-37x2+42.5x+75
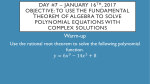
Here’s a graph of this particular polynomial:
You can’t use the “rational roots theorem” (lesson 117) directly to find all the rational roots of:
x4-3.5x3-37x2+42.5x+75 = 0
because the “rational roots theorem” requires that all of the polynomial coefficients be integers. Clearly,
-3.5 and 42.5 are not integers! You can use the rational roots theorem, though; simply multiply both
sides by some value that turns them all into integers. In this case, multiplying both sides by 2 will do it:
2x4-7x3-74x2+83x+150 = 0
All of the rational roots will have this form:
±
factors of 150
factors of 2
Since 150 = 2 x 3 x 5 x 5, we have a lot of possible factors, and these do cover all the roots:
±
{1, 2,3,5, 6,10,15, 25,30,50,75,150 }
{ 1,2}
As discussed in lesson 118, once you’ve found two of the roots, you can divide the 4th degree polynomial
by (x-root) with each of those roots. The result will be a second-order polynomial, which you can solve
directly using the quadratic equation. Eventually you’d find the roots x=-5, x=-1, x=2, and x=7.5.
Irrational roots
If a real root is irrational (can’t be expressed as a fraction of two integers), there’s no simple way of
finding its value in general. However, if a polynomial evaluates to a positive value at some value x=a,
and to a negative value at x=b, then clearly it evaluated to zero somewhere between a and b. That’s
4 of 7
because polynomials are always continuous, and zero is between the positive and negative values. The
same is true the other way; if x=a is negative, and x=b is positive, then again there’s a zero of that
polynomial between a and b.
Lesson 120: Matrix Algebra / Finding Inverse Matrices
If A and B are real numbers, then given the equation:
Ax = B
You can solve this by multiplying both sides by A-1, which is just 1/A:
A-1Ax = A-1B
Since A-1A = 1, that means that:
x = A-1B
The same is true when A and B are matrices, and “x” is replaced with a matrix that is a column of
variables. In fact, this is one of the primary uses of matrices! By doing this, you can solve a massive
number of simultaneous linear equations with a huge number of variables. When they get large, you’ll
want to do this by computer, not by hand, but we can learn how to do the 2-variable case, which only
involves 2x2 matrices at most.
Let’s first examine a simple pair of linear equations:
2x + 3y = 4
5x + 6y = 9
This can be quickly rewritten as matrix multiplication:
[ ][ ] [ ]
2 3 x =4
5 6 y
9
Now to solve this (we want to solve for the matrix of variables on the left-hand-side), we need to multiply
both sides of the equation by the inverse of the 2x2 matrix. This special matrix is called the “inverse
matrix”; any square matrix with a nonzero determinant has an inverse matrix.
Here’s the inverse of any 2x2 matrix:
−1
[ ]
a b
c d
=
[
1
d −b
ad−bc −c
a
]
The inverse is the 1/determinant followed by a modified version of the original matrix. That’s why the
determinant has to be nonzero - if it were zero, we would divide by zero.
Except in special circumstances, matrix multiplication is not commutative: That is, A∙B is not always
equal to B∙A. Thus, when “multiplying on both sides” with matrices, put them on the same position in
both sides. Matrix multiplication is associative; that is, A∙(B∙C)=(A∙B)∙C, where A, B, and C are
matrices and/or complex numbers (including real numbers). Knowing that, let’s solve the example:
5 of 7
[ ][ ] [ ]
[ ] [ ][ ] [ ] [ ]
[]
[ ][ ]
[ ] [ ][ ]
[] [ ]
[][ ]
2 3 x =4
5 6 y
9
−1
2 3
2 3 x
2
=
5 6
5 6 y
5
1
x =
6
y 26−35 −5
x =−1 6 −3
y
3 −5 2
x = −1 −3
y
3 −2
x = 1
y
2/3
x=1, y=2/3
−1
3
6
−3
2
4
9
4
9
4
9
Real-world warnings: Matrix inversion is a very common operation, so it is built into a vast number of
computer programs and calculators. Unfortunately, the “obvious” way of programming a matrix
inversion sometimes gets terribly wrong answers. The problem is that most real numbers are only
approximated by most software; these errors are usually so small that they don’t matter, but when
calculating a matrix inversion the “obvious” way, these approximations can sometimes lead to terribly
wrong answers. This is a solved problem – ways to compensate for this problem have been known for
decades. Unfortunately, some programs don’t do use them. If you’re not sure you can trust the program
that’s doing matrix inversions , check to make sure the compensating techniques have been used
(software peer reviews and testing reduce this risk). In addition, even if the computer has compensating
mechanisms, in some matrices a trivial variation in values will give a vastly different matrix inversion.
No computer algorithm can compensate for that! In the “real world”, you’d also compute the matrix’s
“condition number”; if it’s beyond about 108, don’t use the matrix inverse at all, because the matrix
inversion is too sensitive to the exact data values to be useful.
Lesson 121: Piecewise Functions / Greatest Integer Function
Piecewise functions
Real-world systems often don’t follow simple equations over all the domains we’re interested in, and
there’s an easy way to handle that - we just define functions in pieces. Traditionally, this is shown with
an opening curly brace on the left, followed by various expressions (one per line), and the expressions are
then followed by conditions where that expression is valid. Some people omit the “if...” in a condition;
it’s clearer if you include the word “if”, though, and note that Saxon does include the word “if”. For
example:
{
2
f x= x if x1
x if x≥1
Many computer programs can handle piecewise functions, too, but many of them require that you give
them in the opposite order, that is, you say “if” first, then the condition, and then the expressions
depending on whether it is true or false. For example, in wxMaxima (a computer algebra system), the
same function could be represented this way:
6 of 7
(if x<1 then x^2 else x)
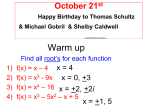
Here’s a graph of this function:
Often these functions will be continuous, but in some cases there will be a “jump” from one position to
another. Show these “jumps” on a graph using unfilled circles; the unfilled circle means “not here” (see
the book for examples).
You should be able to create a graph from a piecewise function, and a piecewise function definition given
the graph. Creating the functions from a graph should be easy: Just notice where there’s a change from
one function to another, and write those domains down (on the right-hand-side) first. Then, for each
piece, figure out what the function is.
So if you started just from the graph above, it should be obvious that the change happens when x=1.
While x≤1, we have a parabola, while when x≥1, we have a line. The graph seems connected (no
“jump”), so it doesn’t matter if you assign x=1 to the parabola or the line, but you must assign it only
once, and since x=1 is graphed, you must assign it to something. Let’s arbitrarily assign x=1 to the line
(we could assign it to the parabola instead). That means you’d have this:
{
f x= a parabola of some kind if x1
a line of some kind
if x≥1
{
2
Now we just need to fill in each of the equations; the result will be: f x= x if x1
x if x≥1
Greatest Integer Function
The greatest integer function is written using traditional mathematical notation as full square brackets
around some expression, e.g.: [x]. In computer languages it’s often written as INT() or INTEGER(),
though there are many alternatives. If the expression is an integer, it returns the integer; otherwise, it
returns the greatest integer less than the expression. Here are few examples that should clarify this:
[3] = 3
[2.9] = 2
[2.1] = 2
[-1] = -1
[-1.1] = -2
[-1.9] = -2
7 of 7