Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Theoretical and experimental justification for the Schrödinger equation wikipedia , lookup
Hunting oscillation wikipedia , lookup
Thermodynamic system wikipedia , lookup
Relativistic mechanics wikipedia , lookup
Internal energy wikipedia , lookup
Heat transfer physics wikipedia , lookup
Eigenstate thermalization hypothesis wikipedia , lookup
Gibbs free energy wikipedia , lookup
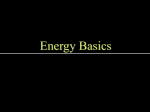
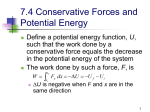
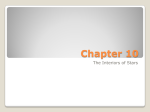
PHYS1110H, 2011 Fall. Shijie Zhong Potential Energy and Conservation of Energy Potential Energy GMm For a conservative force, such as gravitational force F = − eˆr , the work r2 done by the force from to move a particle from position 1 at radius r1 to position 2 at r2, only depends on r1 and r2, but not on the path (i.e., the pathindependent), and the work from last note’s equation (31) is € W1−2 = position2 1 1 F ⋅ dr = GMm( − ) , r2 r1 position1 (1) ∫ or € € W1−2 = position2 ∫ € F ⋅ dr = function of r2 – function of r1 = −U (r2 ) + U (r1 ) , where U(r) is a function and is known as potential energy function. For gravitational potential energy, from (1), € GMm U =− . (3) r Gravitational potential energy U as a function of radial location r. RE can be the surface of a planet. € Equation (2) can be written as position2 W1−2 = F ⋅ dr = −(U 2 −U1 ) = −ΔU ∫ position1 € (2) position1 € or ΔU = −W1−2 (4) 1 This indicates that the potential energy change from position 1 to position 2 (i.e., the gain) ΔU=U2-U1 is equal to negative of the work done by the gravitational force W1-2 to move the mass from position 1 to position. For the mass to gain gravitational potential energy (i.e., ΔU=U2-U1>0), gravitational force must do a negative work to the mass. An example for this case is when a spacecraft is launched to the space. As it moves away from the Earth’s surface, or r increases, the gravitational potential of the spacecraft increases (see the figure above, less negative as r increases). Gravitational force always points to the center of the Earth, opposite to the direction of motion. Therefore, the gravitational force does a negative work. What force does a positive force in this launch process? The force provided by the rocket! In another word, the gravitational potential energy increases when an external force does a positive work. On the other hand, for a mass undergoing a free fall, gravitational force does a positive work to the mass, and the mass loses potential energy or ΔU=U2U1<0. Remarks: 1) The gravitational energy defined in (3) is always negative, and is zero at infinitely far locations. 2) Potential energy can only be defined for conservative forces, not for nonconservative forces, such as friction. 3) Potential energy is like a stored energy. Potential energy is released or decreases if the force (e.g., gravitational force) does positive work (as in a free fall). 4) To increase potential energy (or store more potential energy), some external force must do a positive work (note that in the meantime, the conservative force does a negative work). 5) Potential energy U only has a relative meaning. That is, only change in potential energy is meaningful and is defined by equation 2. This means that one may add an arbitrary constant to potential energy U in equation (3), and it does not change the physics. Example 1. Potential by a constant force, F = −mgeˆ y . For an object that only moves near the surface of the earth, we may treat the gravitational force as a constant F = −mgeˆ y and gravitational potential € 2 € energy can be defined in a much simpler way than equation 3. However, we first need to show that the work done by such a force does not depend on the path. Suppose that a mass is moved from position 1 to position 2 (p1 and p2) as shown below (note that in this diagram with gravitational force points down, there must be an external force to move the mass from p1 to p2). € € The displacement vector can be written as dr = dxeˆ x + dyeˆ y , and the work done by the constant force y2 p2 p2 ˆ ˆ ˆ W1−2 = ∫ F ⋅dr = ∫ (−mge y ) ⋅(dxe x + dye y ) = ∫ −mgdy = −mg(y2 − y1 ) , (5) p1 p1 y1 As we can see, this integral only depends on y coordinates of the beginning and ending points, y1 and y2, and independent of the path (i.e., how it gets there). This was already demonstrated in note 4’s example 7. Therefore, a constant force is a conservative force. We may define potential energy by following equation 2. p2 W1−2 = ∫ F ⋅dr = −mg(y2 − y1 ) = −U 2 + U1, (6) p1 U=mgy. € (7) Note that if we choose the ground as y=0, then gravitational potential energy as defined in (7) for a constant force is positive, different from (3). As y increases or the mass gets higher, U increases. In this example, U increases because the external force does a positive work that gets stored in U. Example 2. Elastic potential energy for a spring. 3 Let’s consider the spring-block system on a frictionless surface. Choose x=0 where the block is when the spring is neutral, i.e., in equilibrium, as in note 4’s example 4. When an external force is applied to the block to either stretch or compress the spring, the work done the external force is converted to potential energy that is stored to the spring as elastic potential energy. Let’s determine the elastic potential energy. The spring force is given as Fstring = −kx , and the work done by the spring force to the block from x1 to x2 is x2 1 1 W1−2 = ∫ −kxdx = − kx22 + kx12 . (8) 2 2 x € 1 € This leads to definition of elastic potential energy for a spring 1 1 W1−2 = − kx22 + kx12 = −U 2 + U1. (9) 2 2 1 U = kx 2 . (10) 2 € € Equation (14) is a parabola and is symmetric for x=0. U=0 at x=0, and U increases for increasing |x|. 4 Conservation of Energy From work-energy theorem, we have, W1−2 = position2 ∫ poistion1 F ⋅ dr = KE2 − KE1. (11) Combining (2) and (11) leads to € € € € € +U , (12) KE2 − KE1 = −U 2 1 or (13) KE1 + U1 = KE 2 + U 2 , Define mechanical energy E as the sum of kinetic and potential energies, E = KE + U , (14) and equation (13) says that the mechanical energy E is conserved for a system with a conservative force (otherwise equation 12 is not true). Remarks: 1) Although conservation of mechanical energy is derived from Newton’s laws, it is more general than Newton’s laws. Example 3. Conservation of energy for a pendulum Consider a pendulum with a ball of mass m attached to a string of length l. Suppose that at its maximum swing, the string is at an angle of θ to the equilibrium position. What’s the velocity of the ball when it reaches to the equilibrium position? 5 € € € Choose the ball’s equilibrium position (i.e., at the bottom of the swing) as y=0 (position 2), and the potential energy at this position is 0. At the maximum swing (position 1), the height of the ball or y=l(1-cosθ), the potential energy is mgl(1-cosθ) and kinetic energy is zero. The conservation of mechanical energy is 1 1 mgy1 + mv12 = mgy2 + mv22 . (15) 2 2 1 mv2 2 = mgl(1 − cos θ ) . (16) 2 (17) v2 = 2gl(1 − cos θ ) . For this problem, while total mechanical energy is always conserved, the kinetic and potential energies vary with time and exchange with each other. Example 4. Conservation of energy for a spring-block system This is a follow-up from example 2 above and note 4’s example 4. Suppose that the spring-block is compressed by a distance of h from its equilibrium position, and is then released. What’s the velocity of the block at the equilibrium position? Ignore friction. The conservation of mechanical energy for the spring-block system is for the block at positions 1 and 2 with displacements x and velocity v: € € € 1 2 1 2 1 2 1 2 mv1 + kx1 = mv2 + kx2 . (18) 2 2 2 2 Suppose that position 1 is at a displacement of h where v=0, and position 2 is at the equilibrium where x=0. 1 2 1 2 kh = mv2 . (19) 2 2 k v= h. (20) m This is the same answer as equation (16) of note 4. Again, while the total mechanical energy is conserved, the elastic potential energy and kinetic energy exchange with each other all the time. Conservative force and potential energy For conservative force, from equation (2), considering 1-D, 6 x2 W1−2 = ∫ F dx = −U 2 + U1. (21) x1 Suppose that x2=x1+Δx, where Δx is small, (22) FΔx = −[U (x + Δx) −U(x)] = −ΔU . € F =− € € ΔU , Δx or F =− dU . dx (23) Equation (23) describes how one may get the force from the potential energy. For example, for the spring-block, U(x)=1/2kx2, and according to € (23), the spring force is F=-kx, consistent with the Hooke’s law. Equilibrium position, stable equilibrium and oscillation in a bound system. Equilibrium positions can also be determined from potential energy U. Equilibrium positions are where the force F=0 or dU/dx=0. Not all the equilibrium positions are stable. Stable equilibrium positions are where d2U/dx2>0. For example, for the spring-block, U(x)=1/2kx2 (the solid curve in figure below), x=0 is an equilibrium position because dU/dx=kx=0. And d2U/dx2=k>0, and hence x=0 is an stable equilibrium position. On the other hand, for a system with potential energy, U(x)=-1/2kx2, x=0 is still an equilibrium position as that is where the force is zero or dU/dx=0 (the dashed curve in the figure below). However, because d2U/dx2= -k<0, x=0 is an unstable equilibrium position. Potential energy such as U(x)=1/2kx2 describes a potential “well” that may bound a particle in an oscillatory motion. For example, the block in the spring-block system, can undergo the oscillatory motion around equilibrium position x=0. For such a spring-block system, suppose that the spring is initially extended for x0 and then released. The total energy at the beginning, because of zero motion and zero kinetic energy, is simply the elastic potential energy, (24) E 0 = 1/2kx0 2 . When the block is at position x(t), the spring-block system has both kinetic energy and elastic potential energy: € 7 (25) E(t) = U (t) + KE(t) = 1/2kx 2 + 1/2mv2 = E 0 , where the last equal sign comes with conservation of energy (with no friction). This indicates that (in the right figure below) the system’s kinetic energy KE(t) and potential energy U(t) are both time-dependent, but the total energy is conserved and is equal to E0, the initial energy. At x=0, KE= E0, and U=0. At this point, the block will pass x=0 and the spring will be compressed with negative x. The block oscillates around the equilibrium position x=0. € Power The power is time rate of doing work. dW dr P= =F⋅ = F ⋅ v, (26) dt dt where we consider the work done by force F over a small displacement dr is dW = F ⋅ dr . The unit for power is watt (W). 1 watt = 1 J/s. € Non-conservative force and energy balance. € € € When both conservative and non-conservative forces are present, the conservation of energy remains true but its expression needs some careful consideration. We may write down the total force as sum of conservative and nonconservative forces as: 8 € € € F = Fc + Fnc . (27) The work done by the total force along path C from points 1 to 2 is W1−2 = ∫ F ⋅ dr = ∫ ( Fc + Fnc ) ⋅ dr = ∫ Fc ⋅ dr + ∫ Fnc ⋅ dr . (28) C C W1−2 = −U 2 + U1 + W1−2nc , C (29) where the work done by conservative force is replaced with –U2+U1, and W1-2nc is the work done by the non-conservative force along path C from points 1 to 2. According to work-energy theorem, W1−2 = KE2 − KE1 = −U 2 + U1 + W1−2nc . KE2 + U 2 − (KE1 + U1 ) = W1−2nc . E 2 − E1 = W1−2nc . € € € C (30) (31) (32) Example 5. Block sliding down inclined plane with friction. A block is initially at rest on the incline and then starts to slide down (see figure below). What is the speed of the block after it descends for a vertical height of h? At position 1 (higher location), U1=mgh, EK1=0. At position 2, U2=0. According to Newton’s 2nd law, N=mgcosθ, so frictional force Ff = µkN = µkmgcosθ, and points at direction opposite to the motion. The work done by the frictional force, non-conservative force, is € W1−2nc = −µ k mg cos θh /sin θ = −µ k mgh cot θ . Applying (31), 1/2mv2 2 − mgh = −µ k mgh cot θ . (34) v2 = 2gh(1 − µ k cot θ ) . (35) (33) € € 9 Solving 1-D motion using energy conservation. The law of energy conservation (or the work-energy theorem) that we have used so far does not answer the question on how displacement or velocity vary with time, although we have used Newton’s 2nd law to solve for this type of problem before (e.g., solving for acceleration first from Newton’s 2nd law and then obtaining x(t) and v(t)). Here we show how the law of energy conservation can be used to solve for 1-D motion at any time. Let’s still consider the spring-block system, as above. At t=0, the block along the spring is extended to position h, and then the block is released. What’s time dependence of position of block and velocity? The total energy of the spring-block system is the initial elastic potential 2 energy E 0 = 1/2kh , and at any given time t, the energy conservation is U(t) + EK (t) = E 0 = 1/2kh 2 , (36) 2 2 2 or 1/2kx + 1/2mv = 1/2kh , (37) € 2 k 2 v = (h − x 2 ) , (38) m € dx k 2 € = (h − x 2 ) . (39) dt m The sign in front of square root can be either positive or negative, depending € on velocity direction, but we take it positive here. Integrating (39) leads to dx = ∫ dt . ∫ (40) € k 2 (h − x 2 ) m m dx = t + C, ∫ (41) 2 2 k (h − x ) € where C is integration constant. Define X=x/h, equation (41) becomes € 10 m ∫ k 2 = t + C. (42) (1 − X ) Let X=sinφ, and replace C with another unknown constant C’, (42) becomes k k φ= t + C' , t + C'. or arcsin X = (43) m m x k X = = sin( t + C') . (44) h m Considering x=h, when t=0, we have C’=π/2. Therefore, we have € k π k x = h sin( t + ) = h cos( t) , (45) m 2 m where ω = k / m is angular velocity (i.e., with unit rad/sec). The period of the sine function is T = 2 π / ω = 2 π m / k . The velocity of the block is v = dx / dt = −hω sin(ωt) . (46) € € € € € € dX Now let’s see how the energies with time: € KE = 1/2mv2 = 1/2mh 2ω 2 sin 2 (ωt) = 1/2kh 2 sin 2 (ωt) . U = 1/2kx 2 = 1/2kh 2 cos 2 (ωt) . (48) E = U + EK = 1/2kh 2 cos 2 (ωt) + 1/2kh 2 sin 2 (ωt) = 1/2kh 2 = E 0 . (47) (49) € € € 11 € € € € € € This method can be generalized to beyond the spring-block system. Suppose that a mass in a conservative force field with potential energy U(x), and the mass has a total energy E. Suppose x0 is a stable equilibrium position of the potential energy U. Conservation of the energy is U(x) + 1/2mv2 = E . (50) Solve for v and integrate v=dx/dt, and we have the equivalence of (41) as dx = t + C. ∫ (51) 2 [E −U (x)] m dU(x0)/dx=0, because x0 is an equilibrium position. Then we may apply the Taylor expansion around x0 to find an approximate expression of U(x) around the equilibrium position, to the second order term dU (x0 ) 1 d 2U(x0 ) U(x) = U (x0 ) + ⋅ (x − x0 ) + ⋅ (x − x0 )2 . (52) dx 2 dx 2 1 U(x) −U (x0 ) = k(x − x0 )2 . (53) 2 where we considered dU(x0)/dx=0, and define k=d2U(x0)/dx2>0. Now let’s redefine x axis such as x0=0, that is, x is deviation from the equilibrium position, similar to how x is defined in the spring-block system. We also use U(x0) as the reference potential energy, and hence (53) becomes 1 U(x) = kx 2 , (54) 2 and (51) remains the same form but with the newly defined x. Substituting (54) to (51), we have dx = t + C. ∫ (55) 2 1 2 (E − kx ) m 2 Define a new variable x = y 2E / k and (55) is m dy = t +C. ∫ (56) 2 k 1− y k € t + C') . (57) m 2E k x= sin( t + C') . (58) k m This is a similar solution to (45). We cannot solve for C’ because of the lack of initial condition. Also notice that x is deviation from x0, and the oscillation is around the stable equilibrium position x0. y = sin( € € € 12