Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
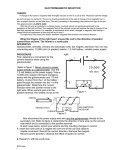
Transmission of Serial Data Using Inductive Data Transfer by Mikhail Dembicki 4/27/04 Table of Contents Introduction: Specifications Parts List Construction method: Testing Theory of Operation Conclusion 3 3 4 6 9 11 12 Figure list Circuit schematic Finished board Coil construction Hyper Terminal setup Hyper Terminal operation Circuit logic levels Correct coil alignment Coil alignment 6 7 8 9 10 10 11 13 Introduction: Sending data between two electronic devices that are separated by some distance is usually as simple as running a cable between the two devices, except that this direct electrical connection isn’t always possible. This is when inductive data transfer becomes an important tool in moving data from one device to another. Inductive data transfer sends data by magnetic induction not a direct connection. This allows the devices sending and receiving data to be completely isolated from one another, the only requirement is that the devices be near enough for magnetic induction to occur. The system that was designed to fulfill the requirements of being able to send and receive data using magnetic induction, without the use of costly parts, is easy to construct, operate, can be adapted to be used in an underwater environment, and can be connected to standard serial data communications bus, such as the serial port on a computer. All of theses requirements were met in the design and construction of this device. Specifications: Size: Board Coil 3 in. long by 2 in. wide, by ¾ in. tall 2 inches diameter by 3/4inch tall cylinder Power: Voltage Current draw in idle and receiving state Average current draw in sending state 12V 20mA 100mA Communication: RS232 serial Female 9-pin connector Maximum data rate 4800 Baud Flow control None Note: Start bits, stop bits, and parity bits, along with all data error checking needs to be handled by external devices. Higher data rates are not recommended because data accuracy drops below acceptable limits. Lower data rates are possible and will not affect system function. Cost: 2 complete boards and coils $20 Parts List Parts Resistors 330 ohm 5% 470 ohm 5% 1,000 ohm 5% 2,200 ohm 5% 10,000 ohm 5% 22,000 ohm 5% 2 1 3 1 3 1 Capacitors .001 micro Farad .1 micro Farad 10 micro Farad 2 4 2 Integrated circuits MAX232A 555 timer 7805 voltage regulator 1 1 1 Transistors NPN 2222A NPN 3904 TIP31C 1 1 1 Diodes 1N4001 1N4148 1 4 Other parts 2”x3” solder board 3-pin screw terminal 5-pin screw terminal Female DB9 connector 18 AWG magnet wire 30 AWG magnet wire 24 AWG hook up wire 8 pin chip socket 16 pin chip socket 4-40 metal machine screw 4-40 metal nut 60-40 tin/lead solder 100 grit sand paper .5 inch SCH 40 PVC straight coupling .1 thick Plexiglas Super glue 1 1 1 1 5 feet 30 feet 2 feet 1 1 2 2 2 feet 10 square inches 1 2-inch diameter circle 1 tube Quantity Recommended tools for construction Wire strippers Wire cutters Soldering iron Vise Needle nose pliers Solder flux Flux remover Drill & 1/8 inch drill bit Recommended tools for testing completed boards 12 Volt current limiting power supply Multi meter that can measure voltage, and resistance 200Khz or faster oscilloscope This figure shows the schematic of the board with the coil attached to it. Construction method: An estimated 3 hours is needed to assemble & test one board and coil Board: 1) Select location on board for large components 2) Drill holes for screwing down of 7805 and TIP31C 3) Place and solder in all large components such as screw terminals and chip sockets 4) Screw down and then solder in 7805 and TIP31C 5) Place and solder in other components one at a time 6) Cut off any extra wire or component leads 7) Using hook up wire make all necessary connections between components 8) Place chips in chip sockets These two figures show the completed board with all the connectors labeled. The send coil must be connected to the TX terminals, the receive coil to the RX terminals, +12V and ground to the power terminals, and a serial cable to the 9-pin serial port. Note: Two capacitors are mounted on the under side of the board, future versions of this board should mount these capacitors on the top to the board. Coil: 1) Cut a 2 inch diameter circle form Plexiglas 2) Drill 2 holes near one end of PVC straight coupling 3) Super glue PVC straight coupling to center of Plexiglas circle, allow to dry 4) Pull about 6 in of 18AWG magnet though one of the holes in the coupling 5) Wind 30 turns of wire around coupling and pull remaining wire though other hole 6) Twist the two leads together to prevent unraveling 7) Repeat this process with 30AWG magnet wire with 100 turns around the coupling 8) Tack down with super glue as needed 9) Remove enamel from the last 1/4in of each magnet wire lead with sandpaper (1) Drilled holes should be near one end of coupling and opposite each other (1) (2) Super glue coupling to Plexiglas making sure drilled holes are on far end of coupling (2) (3) Begin winding coil by threading 6 inches of wire though one of the holes (3) (4) Wind 30 turns of Magnet wire then thread another 6 inches through opposite hole, supper glue coils down as needed (4) (5) (6) (7) (5) Repeat process with 30 AGW magnet wire, winding 100 turns around the coupling, super glue as needed (6) (7) Photographs of a completed and functional coil Testing: All resistors should be tested to be sure that they are within giving tolerances before they are instilled on the board, all diodes should be tested as well to be sure that they are functional. After the board is assembled it should be connected to the coil and powered up with a current limiting power supply and the current load should be measured, if it is substantially higher than the 20mA idle current draw there is a problem that needs to be resolved before further testing can occur. Once this first phase of testing has been completed, the board should be connected to a computer running Windows 95 or better. Connect to one on the COM ports on the computer though a serial cable. Once the board is connected to the computer it should then be giving power. The application HyperTerminal which is included with the Windows operating system should then be used to communicate with the board. Hyper Terminal should be set up the following way: Bits per second Data bits Parity Stop bits Flow control 4800 8, None 1 None In the properties window of Hyper Terminal the Connect using box should be set to the com port you will be using to connect to the board, the port settings window should be set to be identical to the one pictured Once all of this set up is done, the board can now be tested. During correct operation the board will echo and data sent to it. This means that any data going out will also be received. In simple terms this means that anything you type into the Hyper Terminal window should appear on the screen, if you do not see any characters appearing or if they are not the same characters you typed in, there is a problem. Start by checking for loose connections and then check for correct logic levels in the board using the oscilloscope. Chart of correct logic level values can be found on the next page. The figure that shows the correct logic level operation of the board should be used in diagnosing problems. If there is no problems are detected this way, try using a different computer or a different serial port on the same computer. Try a different serial port or change the COM port settings used in HyperTerminal if there is no data at all being echoed. These figures represent the correct operation of the board on the left, the message “ABCD1234 Correct operation will echo characters” was typed in. The figure on the right simulates what you might see if the board if not working properly. These figures shows the voltage levels you would expect to see in the board while a single bit is being sent. The labeled locations in the schematic above correspond to the logic level chart in the figure on the left. Letters A, B, and C correspond to the transmitter of the board, while letters D, E and F correspond to the receiver side of the board. Once a pair of boards and coils have been constructed and tested individually, they can be tested with each other. The two coils must be aligned to for data transfer to occur, both boards must be powered, and connected to the COM ports of computers. They can be connected to the same computer if the computer has more than one external COM port, or two different computers if only one COM port is available. Correct aligned of the two coils in important for proper data transfer to occur. If a misalignment does occur data quality will be lost During correct operation one board will be able to send and the other board receive. Both boards cannot send data at the same time, trying to do this will result in data loss. Theory of operation: The system sends data under the principle of magnetic induction. Magnetic induction is when a current passing though a length of wire causes a magnetic field to be formed. This concept also states that a magnetic field will cause a current to from in a wire. Hence this system works by inducing magnetic flux in one coil that also induces magnetic flux in a coil near it. This is convenient, as it does not need to be any physical connection between the two coils for magnetic induction to occur. The basic function of the board is as follows: the transmitter side of the circuit functions when the RS-232 bus coming into the board goes to a high state, this causes the output from the MAX232 chip to go to a low state. The transistor between the MAX232 chip and the 555 timer inverts this low output from the MAX232, and enables the 555 timer which then begins to output a square wave at 132 kHz. When the output of the 555 timer goes high state, it enables the TIP31C, which drives the primary coil in the circuit causing magnetic induction to occur though it. The receiver side of the Circuit functions mush the same way as the transmitter side only it picks up magnetic flux instead of creating it. Magnetic flux is picked up in the secondary coil and induces current; this current it is rectified in the full bridge rectifier and then inverted using that transistor between the full bridge rectifier and the MAX232 chip. This pulls the input to the MAX232 chip low from its normally high state. This causes the RS-232 bus to go to a high state, which sends data to an external device. Two boards are needed to make the system work, one to transmit data and one to receive it. The system is designed to run in bi-directional half duplex mode. This means that while both boards can send and receive data, only one can be sending at a time, if both boards were to try to send at the same time that data would become garbled. For communication with external devices, RS-232 Serial through a DB-9 female plug is used. The system can function up to 4800 Baud with reasonable reliability. No flow control is used, all data flow rates need to be managed by external devices. It is recommended that a cyclic redundancy check or other data integrity check be used to assure that the data passing though the system is correct. When the system is powered up or shut off, there are several junk byte will be seen by the receiver, any external systems should wait at least one second for voltage levels in system to stabilize before data transfer can begin. These junk bytes will also appear on the receiver of the device if its mate is turned off or on while the two coils are in close proximity. For good data transfer the coils of the sender and receiver should be as close together as possible. Data can still be sent with up to .3-inch or 7 degree misalignment, though this increases the possibility of errors in the data stream. Many misalignment situations were tested and they appear in a figure on the next page. The system proved to be rather robust in that it can handle a significant misalignment and was still able to transmit accurate data at maximum data rate. Conclusion: This system fulfilled its requirements of being able to send data from one computer to another without a direct-wired connection using magnetic induction. Construction and operation of this board was done in a simple matter that anyone with basic electronics knowledge and computer usage skills should be able to construct and use with a minimum for effort. It also meats the design requirement of being low cost, there are systems currently on the market that cost ten times what this system does and have the same functionality. Further work that needs to be done to this system it a modification of the coils to make them waterproof and attachment of a standard connector to the coils so a screw terminal will no longer be needed. With the use of a printed circuit card and surface mount components to would be possible to reduce the size of this board to approximately half of its current size. This may be useful in situations such as in an Autonomous underwater vehicle where space is at a premium. Coil, as should be assembled for best performance For optimal signal transfer two coils should be placed face to face as close as possible and aligning the coils whenever possible A horizontal misalignment of up to .4 inches can be experienced before signal loss starts to become apparent Coil separation of up to ¼ inch can be experienced before signal loss starts to become apparent Misalignment of up to 5 degrees before signal loss occurs. This type of misalignment caused the most signal loss during testing