Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Subpixel rendering wikipedia , lookup
Charge-coupled device wikipedia , lookup
Framebuffer wikipedia , lookup
Apple II graphics wikipedia , lookup
Rendering (computer graphics) wikipedia , lookup
Color vision wikipedia , lookup
Autostereogram wikipedia , lookup
Stereoscopy wikipedia , lookup
Anaglyph 3D wikipedia , lookup
List of 8-bit computer hardware palettes wikipedia , lookup
Image editing wikipedia , lookup
Edge detection wikipedia , lookup
BSAVE (bitmap format) wikipedia , lookup
Stereo display wikipedia , lookup
Indexed color wikipedia , lookup
Achromatic light (black and white)
Perceptual Issues
Humans can discriminate about 0.5 minute of arc
- At fovea, so only in center of view, 20/20 vision
- At 1m, about 0.2mm (Dot Pitch of monitors)
- Limits the required number of pixels
Humans can discriminate about 8(9) bits of intensity
Intensity Perception
Humans are actually tuned to the ratio of intensities.
- So we should choose to use 0, 0.25, 0.5 and 1
Most computer graphics ignores this:
- It uses 0, 0.33, 0.66, and 1
Low range, high res
Dynamic Range
Humans can see:
High range, low res
contrast at very low and very high light levels,
but cannot see all levels all the time
- use adaptation to adjust
- high range even at one adaptation level
Film has low dynamic range ~ 100:1
Monitors are even worse ~ 70:1
Display on a Monitor
Voltage to display intensity is not linear (Digital, Analog).
Gamma Control: (Gamma correction)
Idisplay Ito-moniter, so Ito-moniter Idisplay1/
, is controlled by the user,
- Should be matched to a particular monitor
- Typical values are between 2.2 and 2.5
Color
Light and Color
The frequency of light determines its color
- Frequency, wavelength, energy all related
Color Spaces
The principle of trichromacy means: the displayable colors are
all the linear combination of primaries
Taking linear combinations of R, G and B defines the RGB
color space
- The range of perceptible colors generated by adding some part each
of R, G and B.
- If R, G and B are correspond to a monitor’s phosphors (monitor
RGB), the space is the range of colors displayable on the monitor.
RGB
- Only a small range of all the colors humans are perceivable
(i.e. no magenta on a monitor)
- It is not easy for humans to say how much of RGB to use to
make a given color
- Perceptually non-linear:
- two points a certain distance apart in one part of the space may be
perceptually different
- Two other points, the same distance apart in another part of the
space, may be perceptually the same
CIE-XYZ and CIE-xy
Color matching functions are everywhere positive
- Cannot produce the primaries – need negative light!
- But, can still describe a color by its matching weights
- Y (Z?) component intended to correspond to intensity
Most frequently set x=X/(X+Y+Z) and y=Y(X+Y+Z)
- x,y are coordinates on a constant brightness slice
- Linearity: colors obtainable by mixing A, B lie on line segment AB.
- Monochromatic colors (spectral colors) run along the Spectral Locus
- Dominant wavelength: Spectral color that can be mixed with white
to match
- Purity = (distance from C to spectral locus)/(distance from white to
spectral locus)
- Wavelength and purity can be used to specify color.
- Complementary colors=colors that can be mixed with C to get white
Linear Transform: [x,y,z]T = [xr,xg,xb \\ yr,yg,yb \\ zr,zg,zb][r,g,b]T
Describe incoming light by a spectrum
Gamut: The range of colors that can be produced by a space
YIQ: mainly used in television
- Intensity of light at each frequency
- Wavelengths in the visible spectrum: between the infra-red (700nm)
and the ultra-violet (400nm)
- Y is (approximately) intensity, I, Q are chromatic properties
- Linear color space: there is lin. trans. from XYZ(and RGB) to YIQ
- I and Q can be transmitted with low bandwidth
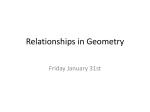
# Photons
Red paint absorbs green and blue wavelengths, and
reflects red
wavelengths, resulting
in you seeing a red
appearance
Wavelength (nm)
400 500 600 700
Sensor is defined by its response to a frequency distribution.
Expressed sensitivity vs. wavelength, ()
- For each unit of energy at the given wavelength, how much
voltage/impulses/whatever the sensor provides.
To compute the response, take Int{() E()d}
- E() is the incoming energy at the particular wavelength
Changing Response
Take a white sensor and change it into a red sensor? Use red
filters.
Can not change a red sensor into a white sensor.
Assume your eye is a white sensor. Why you can see a black
light (UV) shining on a surface?
- Such surfaces are fluorescent – Change the frequency of light
- Your eye is not really a white sensor - it just approximates one
Seeing in Color
Rods work at low light levels and do not see color
Cones come in three types (experimentally and
genetically proven),
each responds in a
different way to
frequency distributions
HSV
- Hue: the color family: red, yellow, blue…
- Saturation: The purity of a color: white is totally unsaturated
- Value: The intensity of a color: white is intense, black isn’t
- Space looks like a cone: parts of the cone can be mapped to RGB
-Not a linear space: no linear transform to take RGB to HSV.
Uniform Color Spaces
Distance in the color space corresponds to perceptual distance.
Only works for local distances: Red from green? is hard to define.
MacAdams ellipses defines perceptual distance.
CIE uv is non-linear, color differences are more uniform.
[u,v]T=1/(X+15Y+3Z)[4X,9Y]T
Subtractive mixing
Cyan=White−Red, Magenta=W−Green,Yellow=W−Blue
Linear transform between XYZ and CMY
Color Quantization
Indexed Color
Assume k bits per pixel (typically 8)
Define a color table containing 2k colors (24 bits per color)
Color Quantization
Quantization Error - Define an error for each color, c, in the original
image: d(c,c1), where c1 is the color c maps to under the quantization
- squared distance in RGB, distance in CIE uv space
- Sum up the error over all the pixels
Uniform Quantization: Break the color space into uniform cells
- poor on smooth gradients (Mach band)
Populosity:
Color histogram: count the number of times each color appears
Choose the n most commonly occurring colors
- L-con: red
- M-con: green
- S-con: blue
- Typically group colors into small cells first
Color Perception
Colors may be perceived differently:
Median Cut:
Recursively:
- Affected by 1.other nearby colors 2.adaptation to previous views 3.
state of mind
- Find the longest dimension (r, g, b)
- Choose the median of the long dimension as a color to use
- Split along the median plane, and recurse on both halves
Color Deficiency
Red-green color blindness in men
- Red and green receptor genes are carried on X chromosome
- Most of them have two red genes or two green genes
Other color deficiencies
- Anomalous trichromacy, Achromatopsia, Macular degeneration
- Deficiency can be caused by the central nervous system, by optical
problems in the eye, injury, or by absent receptors
Trichromacy
Experiment:
- Show a target color beside a user controlled color
- User has knobs that add primary sources to their color
- Ask the user to match the colors
- It is possible to match almost all colors using only three primary
sources - the principle of trichromacy
- Sometimes, have to add light to the target
- This was how experimentalists knew there were 3 types of cones
Math:
primaries: A, B and C (can be R, G, B, r, g, b)
Colors: M=aA+bB+cC (Additive matching)
Gives a color description system - two people who agree on A, B,
C need only supply (a, b, c) to describe a color
Some colors, M+aA=bB+cC (Subtractive matching)
- Interpret this as (-a, b, c)
- Problem for reproducing colors – cannot suck light into a display
device
Color matching functions
Given a spectrum, how to determine how much each of R, G
and B to use to match it?
For a light of unit intensity at each wavelength, ask people to
match it with R, G and B primaries
Result is three functions, r(), g() and b(), the RGB color
matching functions
E rR gG bB
r
r ( ) E ( ) d
g ( ) E ( ) d
b b ( ) E ( ) d
g
E(): the amount of energy at each wavelength.
E is the color due to E().
The RGB matching functions describe how much of each
primary is needed to match one unit of energy at each
wavelength
Map other colors to the closest chosen color
- ignore under-represented but important colors
This algorithm is building a kD-tree, a common form of spatial
data structure. It divides up the space in the most useful way.
Mach bands
- The difference between two colors is more pronounced when they
are side by side and the boundary is smooth.
- This emphasizes boundaries between colors, even if the color
difference is small.
- Rough boundaries are averaged by our vision system to give smooth
variation
Dithering
Why? 1.Adding noise along the boundaries can remove Mach
bands. 2.General perceptive principle: replaced structured
errors with noisy ones and people complain less
Black-and-white to grayscale: I=0.299R+0.587G+0.114B
Threshold Dithering: (Naïve) If the intensity < 0.5, replace
with black, else replace with white
- Not good for non-balanced brightness
Constant Brightness Threshold: to keep the overall image
brightness the same: Compute the average intensity over the
image; and use a threshold that gives that average.
- i.e. average intensity is 0.6, use a threshold that is higher than 40% of
the pixels, and lower than the remaining 60%
- Not good when the brightness range is small
Random Modulation: Add a random amount to each pixel
before thresholding
- Not good for black and white, but OK for more colors
Ordered Dithering: Define a threshold matrix
2223102014
25 3 8 5 17
15 6 1 2 11
12 9 4 7 21
1819132416
random
which
looks
better
Filitering
H ( ) F ( ) G ( )
h( x) f g f (u) g ( x u)du
Convolution Theorem
Convolution in spatial domainMultiplication in freq. domain
Multiplication in spatial domainConvolution in freq. domain
Aliasing
If the sampling rate is too low, high frequencies get
reconstructed as lower frequencies
Transformations convert points between coordinate systems
2D Affine Transformations
x a xx x a xy y bx
Why? Affine transformations are linear
y a yx x a yy y by
boxes
k 1
k 1
- High freq.s from one copy get added to low freq.s from another
Poor reconstruction also results in aliasing
Nyquist frequency: minimum freq. with which functions must
be sampled – twice the maximum freq. present in the signal
Filtering Algorithm
I output[ x][ y]
k/2
k/2
I
i k / 2 j k / 2
input
[ x i][ y j ]M [i k / 2][ j k / 2]
Box Filter Spatial: Box; Freq.: sinc
1 1 1
Box filters smooth by averaging neighbors 1 1 1 1
In frequency domain, keeps low frequencies 9 1 1 1
1 2 3 2
2 4 6 4
and attenuates (reduces) high frequencies.
1
3 6 9 6
Bartlett Filter
81
2
2 4 6 4
Spatial: Triangle(boxXbox) Freq.: sinc
1 2 3 2
Attenuates high frequencies more than a box.
1 4 6 4
4 16 24 16
Guassian Filter
1
6 24 36 24
Attenuates high frequencies even further
256
4 16 24 16
In 2d, rotationally symmetric, so fewer artifacts
1 4 6 4
1D to 2D Filter
Multiply 2 1D masks together using outer product
M is 2D mask, m is 1D mask M [i][ j ] m[i]m[ j ]
High-Pass Filters can be obtained from a low-pass filter
- Subtracting the smoothed image from the 0
0
original means subtracting out the low
frequencies, and leave the high frequencies.0
1
2
3
2
1
1
4
6
4
1
0 0
1 2 1
1 2 1
1
1
1 0 2 4 2 2 12 2
16
16
0 0
1 2 1
1 2 1
High-pass masks come from matrix subtraction
Edge Enhancement
Adding high frequencies back into the image enhances edges
Image = Image + [Image – smooth(Image)]
Fixing Negative Values
Truncate: Chop off values below min or above max
Offset: Add a constant to move the min value to 0
Re-scale: Rescale the image values to fill the range (0,max)
Image Warping
Mapping from the points in one image to points in another
f tells where in the new image to put
I out [x] I in[ f (x)]
the data from x in the old image
Reducing Image Size
Warp function: f(x)=kx, k > 1
Problem: More than one input pixel maps to each output pixel
Solution: Apply the filter, only at desired output locations
Enlarging Image
Warp function: f(x)=kx, k < 1
Problem: Have to create pixel data
Solution: Apply the filter at intermediate pixel locations
New pixels are interpolated from old ones
May want to edge-enhance images after enlarging
Image Morphing Process to turn one image into another
e
7/16
3/16 5/16 1/16
Pattern Dithering: Compute the intensity of each sub-block and
index a pattern.
- Pixel is determined only by average intensity of sub-block
Floyd-Steinberg Dithering: Start at one corner and work
through image pixel by pixel, and threshold each pixel.
- Usually top to bottom in a zig-zag
Compute the error at that pixel, propagate error to neighbors by
adding some proportion of the error to each unprocessed
neighbor
Color Dithering: Same techniques can be applied, with some
modification (FS: Error is diff. from nearest color in the color table)
- Blue-screening is the analog method
- Why blue? It’s the least component in human body.
3. Store pixel depth instead of alpha
- compositing can truly take into account foreground and background
Transformations
Coordinate Systems
are used to describe the locations of points in space.
Multiple coordinate systems make graphics algorithms easier
to understand and implement
- Some operations are easier in one coordinate system than in another
(Box example)
- Transforming all the individual points on a line
or
gives the same set of points as transforming the
x a xx a xy x bx
endpoints and joining them
y a a y b
yx yy y
- Interpolation is the same in either space.
2D Translation
2D Scaling
2D Rotation
x 1 0 x bx
y 0 1 y b
y
x cos
y sin
x sx 0 x 0
y 0 s y 0
y
sin x 0
x 1
sh
x 0
x
cos y 0
y 0
0 x 0
1 y 0
X-Axis Shear
x 1
Reflect About X Axis y 0
- Easier in hardware and software
2.To compose transformations, simply multiply matrices
3.Allows for non-affine transformations:
- Perspective projections! Bends, tapers, many others.
3D Rotation
Rotation is about an axis in 3D passing through the origin.
Any matrix with an orthonormal top-left 3x3 sub-matrix is a
rotation
- Rows are mutually orthogonal (0 dot product)
- Determinant is 1
- columns are also orthogonal, and the transpose is equal to the inverse
Problems
Specifying a rotation really only requires 3 numbers
- Axis (a unit vector, requires 2) and Angle to rotate
Rotation matrix has a large amount of redundancy
- Orthonormal constraints reduce degrees of freedom back down to 3
- Keeping orthonormal is difficult when transformations are combined
Alternative Representations
1.Specify the axis and the angle
- Hard to compose multiple rotations
2.Euler angles: Specify how much to rotate about X, then how
much about Y, then how much about Z
- Hard to think about, and hard to compose
Filtering in Color
Simply filter each of R,G and B separately
Re-scaling and truncating are more difficult to implement:
4.Quaternions
- Adjusting each channel separately may change color significantly
- Adjusting intensity while keeping hue and saturation may be best,
although some loss of saturation is probably OK
Compositing
Combines components from two or more images to make a new image
Mattes an image that shows which parts of another image are
foreground objects
To insert an object into a background:
- Call the image of the object the source
- Put the background into the destination
- For all the source pixels, if the matte is white, copy the pixel,
otherwise leave it unchanged
Blue Screen: Photograph/film the object in front of a blue BG, then
consider all the blue pixels in the image to be the background.
Alpha
Basic idea: Encode opacity information in the image
Add an extra alpha channel to each image, RGBA
- =0 is always black
- Some loss of precision as gets small, but generally not a problem
Basic Compositing Operation
The different compositing operations define which image wins
in each sub-region of the composite.
At each pixel, combine the pixel data from f and the pixel data
from g with the equation: co Fc f Gcg
- F and G describe how much of each input image survives, and cf and
cg are pre-multiplied pixels, and all four channels are calculated
Over F=1, G=1-f f covers g
Inside F=g G=0 only parts of f that are inside g contribute
Outside F=1-g G=0 only parts of f outside g contribute
Atop F= g, G=1-f over but restricted to where there is g
Xor F=1-g G=1-f f where there is no g, and g where there is no f
Clear F=0, G=0 fully transparent
Set F=1, G=0 Copies f into the composite
1 y 0
Rotating About An Arbitrary Point
Say you wish to rotate about the point (a,b)
Translate such that (a,b) is at (0,0) x1=x–a, y1=y–b
Rotate x2=(x-a)cos-(y-b)sin, y2=(x-a)sin+(y-b)cos
Translate back again xf=x2+a, yf=y2+b
Scaling an Object About An Arbitrary Point
Translate, Scale, and Translate again
Homogeneous Coordinates
x a xx a xy bx x
Use three numbers to represent a point y a
a yy by y
(x,y)=(wx,wy,w) for any constant w0 yx
1
0
0
1
1
Typically, (x,y) becomes (x,y,1)
Translation can now be done with matrix multiplication!
Translation:
Rotation:
Scaling:
1 0 bx cos sin 0 sx 0 0
0 1 b sin cos 0 0 s 0
y
y
0
1 0 0 1
0 0 1 0
Advantages
1.Unified view of transformation as matrix multiplication
- Define path from each point in the original image to its destination in
the output image
- Animate points along paths
To display and do color conversions, must extract RGB by
dividing out
& Dot Dispersion
looks like 2 16 3 13
newsprint 10 6 11 7
4 14 1 15
12 8 9 5
Unary Operators
Darken: Makes an image darker (or lighter) without affecting
its opacity.
darken( f , ) (rf , g f , b f , f )
Dissolve: Makes an image transparent without affecting its
dissolve ( f , ) (rf , g f , b f , f )
color.
PLUS: Co=Cf+Cg
Example: cross ( f , g , t ) dissolve ( f , t ) plus dissolve ( g ,1 t )
Obtaining Values
1.Hand generate (paint a grayscale image)
2.Automatically create by segmenting an image into
foreground background:
- alpha = 1 implies full opacity at a pixel
- alpha = 0 implies completely clear pixels
Pre-Multiplied Alpha Instead of (R,G,B,), store (R,G,B,)
- Use a different threshold for each pixel of the block
- Compare each pixel to its own threshold
Clustered Dithering
Signal Processing
Spatial domain: signal is given as values at points in space
Freq. dom.: signal is given as values of frequency components
Periodic signal: can be represented as a sum of sine and cosine
waves with harmonic frequencies. S ( x) 12 2 (1) cos(22kk 11)x
Non-periodic function: can be
1 2
1
1
cos x cos 3x cos 5x
3
5
represented as a sum of sin’s and cos’s 2
1
ix
f
(
x
)
F
(
)
e
d
of (possibly) all frequencies
2
F() is the spectrum of f(x)
eix cos x i sin x
- Spectrum is how much of each frequency is present in thefunction
F ( ) f ( x)eix dx
Fourier Transform
- Box: f(x) = 1, |x|<1/2, 0, otheriwse F(w)=sin(f)/f=sinc(f)
- Cos: f(x)=cos(x) F(w)=delta(w-1)+delta(w+1)
- Sin: f(x)=sin(x) F(w)=delta(w-1)-delta(w+1)
- Impulse: f(x)=delta(x) F(w)=1
- Shah Function: | | | | | | | |
- Gaussian: 1/2 exp(-x2/2) Gaussian
Qualitative Properties
Sharp edges give high frequencies
Smooth variations give low frequencies
Bandlimited: if its spectrum has no frequencies above a
maximum limit(sin and cos are, Box and Gaussian are not)
3.Specify the axis, scaled by the angle
- Only 3 numbers, sometimes called the exponential map
- 4-vector related to axis and angle, unit magnitude (Rotation about
axis (nx,ny,nz) by angle . )
- Easy to compose
- Easy to go to/from rotation matrix
- Only normalized quaternions represent rotations, but you can
normalize them just like vectors, so it isn’t a problem
Viewing Transformation
Graphics Pipeline
Local
Coordina
te Space
World
Coordinat
e Space
View
Space
3D
Screen
Space
Displ
ay
Spac
e
Local Coordinate Space
Defining individual objects in a local coordinate system is easy
- Define an object in a local coordinate system
- Use it multiple times by copying it and transforming it into the
global system
- This is the only effective way to have libraries of 3D objects, and
such libraries do exist
Global Coordinate System
Everything in the world is transformed into one coordinate
system - the global coordinate system
-Some things, like dashboards, may be defined in a different space, but
we’ll ignore that
-Lighting (locations, brightness and types), the camera, and some
higher level operations, such as advanced visibility computations, can
be done here
View Space
Associate a set of axes with the image plane
- The image plane is the plane in space on which the image should
appear, like the film plane of a camera
- One normal to, one up in, and one right in the image plane
- Some camera parameters are easy to define(focal length, image size)
- Depth is represented by a single number in this space
3D Screen Space
A cube: [-1,1]×[-1,1]×[-1,1] ; canonical view volume
- Parallel sides make many operations easier
Window Space also called screen space.
Convert the virtual screen into real screen coordinates
- Drop the depth coordinates and translate
The windowing system takes care of this
3D Screen to Window Transform
Windows are specified by an origin, width and height
Clipping
Parts of the geometry may lie outside the view volume
- Origin is either bottom left or top left corner, expressed as (x,y) on
the total visible screen on the monitor or in the framebuffer
- This representation can be converted to (xmin,ymin) and (xmax,ymax)
- View volume maps to memory addresses
- Out-of-view geometry generates invalid addresses
- Geometry outside the view volume also behaves very strangely
under perspective projection
(1,1)
(xmax,ymax)
Clipping removes parts of the geometry outside the view
Best done in screen space before perspective divide (dividing
out the homogeneous coordinate)
Clipping Points
A point is inside the view volume if it is on the (inside) of all
the clipping planes
(xmin,ymin)
(-1,-1)
x pixel xmax
y
pixel
z pixel
1
xmin 2
0
0
xmax xmin 2 xscreen
ymax ymin 2 yscreen
0
ymax ymin 2
0
0
1
0
0
0
0
1
0
z screen
1
- normal to the image plane
- This vector does not have to be perpendicular to n
Size of the view volume – l,r,t,b,n,f
View Space
Origin: at the center of the image plane: (cx,cy,cz)
Normal vector: the normalized viewing direction: n=d
u=up×n, normalized.
u x
v=n×u
v
World to View Transformation
x
1. Translate the world so the origin is at (cx,cy,cz) nx
2. Rotation, such that (a) u in world space should be 0
uz
vy
vz
ny
nz
0
0
0
0
0
1
M world view
vy
vz
ny
nz
0
0
M world screen M view screenM world view
uz
vy
vz
ny
nz
0
0
u c
v c
n c
1
x screen M world screenx world
Perspective Projection
- Works like a pinhole camera
- Distant Objects Are Smaller
- Parallel lines meet
Vanishing points
Each set of parallel lines (=direction) meets at a different point:
The vanishing point for this direction
- Classic artistic perspective is 3-point persepctive
- Sets of parallel lines on the same plane lead to collinear vanishing
points: the horizon for that plane
- Good way to spot faked images
Basic Perspective Projection
Assume with x to the right, y up, and z back toward the viewer
Assume the origin of view space is at the center of projection
Define a focal distance, d, and put the image plane there (note
P(xs,ys)
P(xv,yv,zv)
d is negative)
y
x s xv
d
zv
v
y s yv
d
zv
xv
xs y
y v
s zv
d zv
d
1
0
Ps
0
0
xv
0
0
1
0
0
1
1
d
0
- Consider the polygon as a list of vertices
- One side of the line/plane is considered inside the clip region, the
other side is outside
- We are going to rewrite the polygon one vertex at a time – the
rewritten polygon will be the polygon clipped to the line/plane
- Check start vertex: if inside, emit it, otherwise ignore it
- Continue processing vertices as follows…
-zv
d
0
0
P
0 v
0
Perspective View Volume
Near and far planes are parallel to the image plane: zv=n, zv=f
Other planes all pass through the center of projection (the
origin of view space)
- The left and right planes intersect the image plane in vertical lines
- The top and bottom planes intersect in horizontal lines
Left Clip
Near
Plane
Clip
xv
Plane
Far Clip
View
Plane
l
Volume
n
f
FOV
r
-zv
Outside
Right Clip
Plane
We want to map all the lines through the center of projection to
parallel lines
General Perspective
0 n
1
0
0 0
0 n f n f 0
0
1n
0 0
0
0
0
0
n
0
0
nf
0
1
Complete Perspective Projection
M view screen
2
r l
0
MOM P
0
0
0
0
2
t b
0
0
0
2
n f
0
r l
r l n
t b
0
t b 0
n f
n f 0
1
f
i
s
n (i x) 0
n (f x) 0
What is inside? Assume sampling with an array of spikes. If
spike is inside, pixel is inside
Ambiguous cases: What if a pixel lies on an edge?
- Problem because if two polygons share a common edge, we don’t
want pixels on the edge to belong to both
- Ambiguity would lead to different results if the drawing order were
different
Rule: if (x+, y+) is in, (x,y) is in
Exploiting Coherence
Scanline coherence: Several contiguous pixels along a row
tend to be in the polygon - a span of pixels
- If both endpoints outside, discard line and stop
- If both endpoints in, continue to next edge (or finish)
- If one in, one out, chop line at crossing pt and continue
- Consider whole spans, not individual pixels
Some cases lead to premature acceptance or rejection
- Incrementally update the span endpoints
Edge coherence: The pixels required don’t vary much from one
span to the next
- If both endpoints are inside all edges
- If both endpoints are outside one edge
Sweep Fill Algorithms
Fill the bottom horizontal span of pixels; move up and keep fill
Have xmin, xmax for each span
Define:
General rule – if a fast test can cover many cases, do it first
Details: Only need to clip line against edges where one
endpoint is out:
Use outcode to record endpoint in/out wrt each edge. One bit
per edge, 1 if out, 0 if in.
1
0010 2
- floor(x): largest integer < x
- ceiling(x): smallest integer >=x
3
Fill from ceiling(xmin) up to floor(xmax)
Edge Table
&
Active Edge List
4
Row:
6
5
Liang-Barsky Clipping
0101
Parametric clipping - view line in parametric form and reason
about the parameter values
4
- More efficient, as not computing the coordinate values at irrelevant
vertices
- Works for rectilinear clip regions in 2D or 3D
- Clipping conditions on parameter: Line is inside clip region for
x x2 x1
values of t such that (for 2D): xmin x1 tx xmax
p 2 x
q 2 x max x 1
p 3 y q 3 y1 y mi n
q 4 y max y1
0
0
n
0
0
n f
0
1
0
0
nf
0
- Compute entering t values, which are qk/pk for each pk<0
- Compute leaving t values, which are qk/pk for each pk>0
- Parameter value for small t end of line is:tsmall= max(0, entering ts)
- parameter value for large t end of line is: tlarge=min(1, leaving ts)
- if tsmall<tlarge, there is a line segment - compute endpoints by
Inside
substituting t values
Near/Far and Depth Resolution
It may seem sensible to specify a very near clipping plane and
a very far clipping plan, but, a bad idea:
- OpenGL only has a finite number of bits to store screen depth
- Too large a range reduces resolution in depth - wrong thing may be
considered (in front)
Always place the near plane as far from the viewer as possible,
and the far plane as close as possible
Weiler Atherton Polygon Clipping
Faster than Sutherland-Hodgman
for complex polygons
For clockwise polygon:
2
3
go up
1
4
5
6
8
- for out-to-in pair, follow usual rule
- for in-to-out pair, follow clip edge
4 0 5
3 2 0 5 6 0 6
2
2 2 0 5 6 0 6
1 2 0 5 6 0 6
2 0 5
6 0 6
xmin
1/m
- Sub-pixel mask: Matrix of bits saying which parts of the pixel are
covered by the polygon
Algorithm: When drawing a pixel (first pass):
- if polygon is opaque and covers pixel, insert into list, removing all
polygons farther away
- if polygon is transparent or only partially covers pixel, insert into list,
but don’t remove farther polygons
5 0 6 6 0 6
x
1/m
7
- Replace crossing points with vertices
- Double all edges and form linked lists of edges
- Change links at vertices
- Enumerate polygon patches
Can use clipping to break concave polygon into convex pieces;
main issue is inside-outside for edges
- Do more than Z-buffer: Anti-aliasing, transparent surfaces
- Coverage mask idea can be used in other visibility algorithms
Disadvantages: - Not in hardware, and slow in software
- Still at heart a z-buffer: Over-rendering and depth quantization
Scan Line Algorithm (Image Precision)
Assume polygons do not intersect one another
Observation: across any given scan line, the visible polygon
can change only at an edge
Algorithm: - fill all polygons simultaneously
- at each scan line, have all edges that cross scan line in AEL
- keep record of current depth at current pixel: decide which is in front
Advantages: - Simple
- Potentially fewer quantization errors (more bits available for depth)
- Don’t over-render (each pixel only drawn once)
- Filter anti-aliasing can be made to work (have information about all
polygons at each pixel)
Disadvantages: - Invisible polygons clog AEL, ET
- Non-intersection criteria may be hard to meet
Depth Sorting (Object Precision, in view space)
Sort polygons on depth of some point
Render from back to front (modifying order on the fly)
Rendering: For surface S with greatest depth
-If no overlap in depth with other polygons, scan convert
-Else, for overlaps in depth, test for overlaps in the image plane
-If none, scan convert and go to next polygon
-If S, S1 overlap in depth and in image plane,swap order and try again
-If S, S’ have been swapped already, split and reinsert
Testing for overlaps: Start drawing when first condition is met:
- x-extents or y-extents do not overlap
- S is behind the plane of S1
- S1 is in front of the plane of S
- S and S1 do not intersect in the image plane
Advantages: - Filter anti-aliasing works fine
- No depth quantization error
Disadvantages: - Over-rendering
- Potentially large number of splits - (n2) fragments from n polygons
6 0 6
ymax
Advantage:
ymax
Warnock’s Area Subdivision
Exploits area coherence: Small areas of an image are likely to
be covered by only one polygon
What’s in front in a given region:
- Infinite Nyquist frequency
- Attempting to sample sharp edges gives jaggies, or stair-step lines
1.a polygon is completely in front of everything else in that region
2.no surfaces project to the region (empty)
3.only one surface is completely inside the region, overlaps the region,
or surrounds the region
Algorithm 1.Start with whole image
2.If one of the easy cases is satisfied, draw what’s in front
3.Otherwise, subdivide the region and recurse
4.If region is single pixel, choose surface with smallest depth
Advantages: - No over-rendering
- Anti-aliases well - just recurse deeper to get sub-pixel information
Disadvantage: - Tests are quite complex and slow
Solution: Band-limit by filtering (pre-filtering)
But when doing computer rendering, we don’t have the original
continuous function
Pre-Filtered Primitives
We can simulate filtering by rendering “thick” primitives, with
, and compositing
Expensive, and requires the ability to do compositing
Hardware method: Keep sub-pixel masks tracking coverage
2.Split its cell using plane on which polygon lies (May have to chop
polygons in two (Clipping!))
3.Continue until each cell contains only one polygon fragment
4.Splitting planes could be chosen in other ways, but there is no
efficient optimal algorithm for building BSP trees
5.Optimal means minimum number of polygon fragments in a
balanced tree
- no floating point
- can tell if x is an integer or not, and get floor(x) and ceiling(x) easily,
for the span endpoints
Anti-Aliasing
Recall: We can’t sample and then accurately reconstruct an
image that is not band-limited
go up
Easiest to start outside
General Clipping
Clipping general against general polygons is quite hard
Outline of Weiler algorithm:
4 2 0 5 4 0 5
5 0 6
Dodging Floating Point
For edge, m=x/y, which is a rational number
View x as xi+xn/y, with xn<y. Store xi and xn
Then x->x+m’ is given by:
- xn=xn+x
- if (xn>=y) { xi=xi+1; xn=xn- y }
Advantages:
When pk<0, as t increases line goes from outside to inside – entering
When pk>0, line goes from inside to outside – leaving
When pk=0, line is parallel to an edge (clipping is easy)
- compute t’s for each edge in turn
(some rejects occur earlier like this)
5 5 0 6 6 0 6
6 0 6
y y2 y1
Improvement (and actual Liang-Barsky):
6
3
1
Left edge is 1,
right edge is 2,
top edge is 3,
bottom is 4
q
tk k
pk
A-buffer (Image Precision)
Handles transparent surfaces and a form of anti-aliasing
At each pixel, maintain a list of polygons sorted by depth, and a
sub-pixel coverage mask for each polygon
- At each pixel, traverse buffer using polygon colors and coverage
masks to composite.
Similar forms for y=a, z=a
Inside/Outside in Screen Space
- In canonical screen space, clip planes ws xs ws
are xs=±1, ys=±1, zs=±1
ws ys ws
Inside/Outside reduces to comparisons
ws z s ws
before perspective divide
Clipping Lines
Cohen-Sutherland
Works basically the same as Sutherland-Hodgman
Clip line against each edge of clip region in turn
p1 x q1 x 1 x mi n ymin y1 ty ymax
- Choose an order for the polygons based on some choice (e.g. depth
to a point on the polygon)
- Render the polygons in that order, deepest one first
Difficulty: - works for some important geometries (2.5D)
- doesn’t work in this form for most geometries
Algorithm: (Rendering pass)
( y2 y1 )
(z z )
(a x1 ), z1 2 1 (a x1 ))
( x2 x1 )
( x2 x1 )
- Trivial reject: outcode(x1)&outcode(x2)!=0
- Trivial accept: outcode(x1)|outcode(x2)==0
- Which edges to clip against?
outcode(x1)^outcode(x2)
things that cannot be seen
2.Accuracy - answer should be right, and behave well when the
viewpoint moves
3.Complexity - object precision visibility may generate many
small pieces of polygon
Painters Algorithm
- Computing the required depth values is simple
Disadvantages: - Depth quantization errors can be annoying
- Over-renders - worthless for very large collections of polygons
- Can’t easily do transparency or filtering for anti-aliasing
Non-exterior rule: A point is inside if every ray to infinity intersects
the polygon
Non-zero winding number rule: Draw a ray to infinity that does not hit
a vertex, if the number of edges crossing in one direction is not equal
to the number crossing the other way, the point is inside
Parity rule: Draw a ray to infinity and count the number or edges that
cross it. If even, the point is outside, if odd, it’s inside
Finding Intersection Pts
Use the parametric form for the edge between x1 and x2:
x(t ) x1 (x2 x1 )t
0 t 1
For planes of the form x=a:
xi (a, y1
- World, View and Canonical Screen spaces might be used
- Depth can be updated on a per-pixel basis as we scan convert
polygons or lines
1.Efficiency – it is slow to overwrite pixels, or scan convert
Initialize this buffer to a value corresponding to the furthest pt
As a polygon is filled in, compute the depth value of each pixel
if depth < z-buffer depth, fill in pixel color and new depth
Advantages: - Simple and now ubiquitous in hardware
Filling polygons
What is inside?
If there is a segment of the line inside the clip region, sequence
of infinite line intersections must go: enter, enter, leave, leave
0 Algorithm:
0 n f
0
x
n
p 4 y
1
0
MP
0
0
d1>d2 => pi positive => next point at (xi+1,yi+1)
Algorithm
For integers, slope between 0 and 1:
- x=x1, y=y1, p=2 y - x, draw (x, y)
- until x=x2
- x=x+1
- p>0 ? y=y+1, draw (x, y), p=p+2 y - 2 x
- p<0? y=y, draw (x, y), p=p+2 y
n (s x) 0
Inside
Visibility
Given a set of polygons, which is visible at each pixel? (in
front, etc.). Also called hidden surface removal
Algorithms known have two main classes:
- Object precision: computations that decompose polygons in
world to solve
- Image precision: computations at the pixel level
All the spaces in the viewing pipeline maintain depth, so we
can work in any space
- Value that will determine which pixel to draw
Z-buffer (depth buffer) (Image Precision)
- Easy to update from one pixel to the next
Decision Variable pi x(d1 d 2 ) 2y( xi 1) 2xyi x(2c 1) For each pixel on screen, have at least two buffers
-Color buffer stores the current color of each pixel
d1<d2 => pi negative => next point at (xi+1,yi)
-Z-Buffer stores at each pixel the depth of the nearest thing seen so far
To clip a polygon to a line/plane:
Inside-Outside Testing
uy
(1,0,0) in view space (b) v should be (0,1,0) (c) n should be (0,0,1)
uy
- Clip polygon each time to line containing edge
- Only works for convex clip regions
- edge crosses the clip line/plane from out to in: emit crossing point,
next vertex
- edge crosses clip line/plane from in to out: emit crossing
- edge goes from out to out: emit nothing
- edge goes from in to in: emit next vertex
- Specified with respect to the image plane, not the world
yi 1 round ( yi m)
Bresenham’s Algorithm
Plot the pixel whose y-value is closest to the line
Given (xi,yi), must choose from either (xi+1,yi+1) or (xi+1,yi)
Compute a decision variable
Sutherland-Hodgman Clip
Clip the polygon against each edge of the clip region in turn
Look at the next vertex in the list, and the edge from the last
vertex to the next. If the
A direction that we want to appear (up) in the image
yi 1 round (mxi 1 b)
xi 1 xi 1,
- the plane as nxx+nyy+nzz+d=0, with (nx,ny,nz) pointing inward
- and nxpx+nypy+nzpz+d>0
General Projection Cases
Specifying a View
The center of the image plane, (cx,cy,cz)
A vector that points back toward the viewer: (dx,dy,dz)
0 0 cx u x
1 0 c y v x
0 1 c z nx
0 0 1 0
xi 1 xi 1,
- step x, compute new y at each step by adding m to old y, rounding:
In general, a point, p, is inside a plane if:
- Assume Viewer is looking in –z, with x to the right and y up
- near z=n
0
0
r l r l xview
xscreen 2 r l
- far, z=f (f<n)
y
0
t b t b yview
2
t
b
0
screen
- left, x=l
z screen 0
0
2 n f n f n f zview
- right, x=r(r>l)
0
0
1
1 0
1
- top, y=t
- bottom, y=b(b<t) x screen M view screen x view
0 1
0 0
0 0
1 0
- step x, compute new y at each step by equation, rounding:
- X coordinate in 3D must be > -1
- In homogeneous screen space, same as: xscreen> -wscreen
Simple Projection Example
The region of space that we wish to render as a view volume
uz
Consider lines of the form y=m x + c, where m=y/x,
0<m<1, integer coordinates
Variety of slow algorithms (Why slow?):
Why clipping is done in canonical view space?
Ie. to check against the left plane:
- Projection lines are perpendicular to the image plane
- Like a camera with infinite focal length
uy
- Slope -1 ~ 1, one pixel per column. Otherwise, one pixel per row
- Constant brightness? Lines of the same length should light the same
number of pixels (normally ignore this)
- Anti-aliasing? (Getting rid of the “jaggies”)
- The normals to the clip planes point inward, toward the visible stuff
Orthographic Projection
Orthographic projection projects all the points in the world
along parallel lines onto the image plane
u x
v
x
nx
0
Rasterizing
Drawing Points
When points are mapped into window coordinates, they could
land anywhere – not just at a pixel center
Solution is the simple, obvious one 1.Map to window space
2.Fill the closest pixel 3.Can also specify a radius – fill a
square of that size, or fill a circle (Square is faster)
Drawing Lines
1/6
2/3
1/6
Filter
Ideal
=1/6
=2/3
=1/6
over
=1/6
=2/3
=1/6
Pre-Filtered and composited
Post-Filtering (Supersampling)
Sample at a higher resolution than required for display, and
filter image down
Two basic approaches:
-Generate extra samples, filter the result(traditional super-sampling)
-Generate multiple (say 4) images, each with the image plane slightly
offset. Then average the images
BSP-Trees (Object Precision)
Building BSP-Trees: 1.Choose polygon (arbitrary)
BSP-Tree Rendering:
Things on the opposite side of a splitting plane from the
viewpoint cannot obscure things on the viewpoint side
At each node (for back to front rendering):
1.Recurse down the side of the sub-tree that does not contain the
viewpoint (Test viewpoint against the split plane to decide which tree)
2.Draw the polygon in the splitting plane (Paint over whatever has
already been drawn)
3.Recurse down the side of the tree containing the viewpoint
Advantages: -One tree works for any viewing point
- Filter anti-aliasing and transparency work
- Can also render front to back, and avoid drawing back polygons that
cannot contribute to the view
Disadvantages: -Can be many small pieces of polygon - Overrendering