Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Chapter 7
Parallel Ports
Basic Concepts of I/O
• I/O devices are also called peripheral devices.
• I/O devices are pieces of equipment that
exchange data with a computer.
– Examples include switches, light-emitting diodes,
cathode-ray tube screens, printers, modems,
keyboards, and disk drives.
Interface (Peripheral) Chip (1 of 2)
• A chip whose function is to synchronize data transfer
between the CPU and I/O devices
• Consists of control registers, status registers, data
direction latches, and control circuitry
• Has pins that are connected to the CPU and I/O port
pins that are connected to the I/O devices
• Each interface chip has a chip enable signal input or
inputs, when asserted, allow the interface chip to react to
the data transfer request.
• Data transfer between an I/O device and the CPU can
be proceeded bit-by-bit or in multiple bits (parallel).
Interface (Peripheral) Chip (2 of 2)
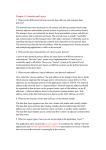
• Address decoder makes sure that each time one and only one
peripheral device responds to the CPU’s I/O request.
Address
Decoder
from
input
device I/O pins
CE
Interface
chip 1
to
output
device
CE
Interface
chip 1
Microprocessor
Data Bus
Figure 7.1 Interface chip, I/O devices, and microprocessor
I/O Schemes
• Isolated I/O scheme
– The microprocessor has dedicated instructions for I/O
operations.
– The microprocessor has a separate address space
for I/O devices.
• Memory-mapped I/O scheme
– The microprocessor uses the same instruction set to
perform memory accesses and I/O operations.
– The I/O devices and memory components are
resident in the same memory space.
I/O Transfer Synchronization
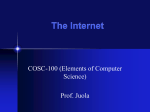
• The role of an interface chip
– Synchronizing data transfer between the CPU and the interface
chip
– Synchronizing data transfer between the interface chip and the
I/O device
Control signals
Microprocessor
Interface chip
handshake or
strobe signal
Data Bus
(such as R/W or
interrupt)
Data Bus
Figure 7.2 The role of an interface chip
I/O device
electronics
Synchronizing the Microprocessor
and the Interface Chip
• The polling method
– For input -- The microprocessor checks a status bit of the
interface chip to find out if the interface chip has received new
data from the input device.
– For output -- The microprocessor checks a status bit of the
interface chip to find out if it can send new data to the interface
chip.
• The interrupt-driven method
– For input -- The interface chip interrupts the microprocessor
whenever it has received new data from the input device.
– For output -- The interface chip interrupts the microprocessor
whenever it can accept new data from the microprocessor.
Synchronizing the Interface Chip
and the I/O Devices
•
Brute-force method -- useful when the data timing is unimportant
– For input -- Nothing special is done. The microprocessor reads the interface chip
and the interface chip returns the voltage levels on the input port pins to the
microprocessor.
– For output -- Nothing special is done. The interface chip places the data that it
received from the microprocessor directly on the output port pins.
•
The strobe method -- a strobe signal used to indicate that data are stable on
I/O port pins
– For input -- The interface chip latches the data into its data register using the
strobe signal.
– For output -- The interface chip places the data on port pins that it received from
the microprocessor and asserts the strobe signal. The output device latches the
data using the strobe signal.
•
The handshake method -- used when timing is crucial
– Two handshake signals used to synchronize the data transfer. One signal, call it
H1, is asserted by the interface chip. The other signal, call it H2, is asserted by
the I/O device.
– Two handshake modes available
• Pulse mode and interlocked mode
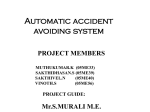
Input Handshake Protocol
• Step 1. The interface chip
asserts (or pulses) H1 to
indicate its intention to input
data.
• Step 2. The input device puts
data on the data port pins and
also asserts (or pulses) the
handshake signal H2.
• Step 3. The interface chip
latches the data and de-asserts
H1. After some delay, the input
device also de-asserts H2.
H1
Data
Valid Data
H2
(a) Interlocked
H1
Data
Valid Data
H2
(b) Pulse mode
Figure 7.3 Input Handshakes
Output Handshake Protocol
• Step 1. The interface chip
places data on the port pins
and asserts (or pulses) H1 to
indicate that it has valid data
to be output.
• Step 2. The output device
latches the data and asserts
(or pulses) H2 to
acknowledge the receipt of
data.
• Step 3. The interface chip
de-asserts H1 following the
assertion of H2. The output
device then de-asserts H2.
H1
Data
Valid Data
H2
(a) Interlocked
H1
Data
Valid Data
H2
(b) Pulse Mode
Figure 7.4 Output Handshaking
Overview of HCS12 Parallel Ports (1 of 3)
• The HCS12 members have from 48 to 144 I/O pins
arranged in 3 to 12 ports and packaged in a quad flat
pack (QFP) or low profile quad flat pack (LQFP).
• All I/O pins serve multiple functions.
• When a peripheral function is enabled, its associated
pins cannot be used as I/O pins.
• Each I/O port has several registers to support its
operation.
• Registers related to I/O ports have been assigned a
mnemonic name and the user can use these names to
refer to them:
movb
#$FF,PTA
; output $FF to Port A
Overview of HCS12 Parallel Ports (2 of 3)
• All I/O ports (except PAD0 and PAD1) have an associated data
direction register and a data register.
• The name of the data direction register is formed by adding the
letters “DDR” as the prefix to the port name. For example, DDRA,
DDRB, and DDRT.
• To configure a pin for output, write a ‘1’ to the associated bit in the
data direction register.
• To configure a pin for input, write a ‘0’ to the associated bit in the
data direction register.
movb #$FF,DDRA
movb #0,DDRA
bset DDRA,$81
; configure port A for output
; configure port A for input
; configure Port A pin 7 and 1 for output
Overview of HCS12 Parallel Ports (3 of 3)
• The name of port data register is formed by adding letters “PT” as
the prefix to the port name. For example, PTA, PTB, PTP, and PTT.
• We can also use “PORT” as the prefix to the port name for port A, B,
E, and K.
• Output a value to a port is done by storing that value to the port data
register.
movb
movb
#$FF,DDRH
; configure Port H for output
#$37,PTH; output the hex value 37 to port H
• Input a value from an input port is done by loading from the port data
register.
movb
ldaa
#0,DDRH ; configure Port H for input
PTH
; read data from port H into A
• An I/O port may have up to eight associated registers.
Port A and Port B
• In expanded mode, Port A carries the timemultiplexed higher address/data signals
A15/D15…A8/D8.
• In expanded mode, Port B carries the timemultiplexed lower address/data signals
A7/D7…A0/D0.
• In single chip mode, these two ports are used as
general I/O ports.
Port E
• Port E pins are used
for bus control and
interrupt service
request signals.
• When a Port E pin is
not used as control or
interrupt signal, it can
be used as general
I/O pin.
PE0/XIRQ
PE1/IRQ
PE2/R/W
PE3/LSTRB/TAGLO
PE4/ECLK
PE5/MODA/IPIPE0
PE6/MODB/IPIPE1
PE7/NOACC/XCLKS
Figure 7.5 Port E pins and their alternate functions
Port E Registers
•
Port E assignment register (PEAR)
– In expanded mode, the PEAR register assigns the function of each port E pin.
•
MODE register
– This register establishes the operation mode and other miscellaneous functions.
•
Pull-up control register (PUCR)
– This register selects the pull-up resistors for the pins associated with the core
ports.
– Port A, B, E, and K are in the core part.
•
Reduced drive register (RDRIV)
– This register selects reduced drive for the pins associated with the core ports.
– This gives reduced power consumption and reduced RFI with a slight increase in
transition time.
•
External bus interface control register (EBICTL)
– Only bit 0 is implemented (ESTR).
– The ESTR bit enables/disables the E clock stretching.
7
6
NOACCE
0
5
4
3
2
PIPOE NECLK LSTRE RDWE
1
0
0
0
$000A
NOACCE: No Access output enable. Can be read/written any time.
0 = PE7 is used as general-purpose I/O pin
1 = PE7 is output and indicates whether the cycle is a CPU free cycle
PIPOE: Pipe signal output enable.
In normal modes: write once. Special modes: write anytime except the first
time. This bit has no effect in single chip modes.
0 = PE[6:5] are general-purpose I/O
1 = PE[6:5] are outputs and indicate the state of the instruction queue.
NECLK: No external E clock. Can be read anytime.
In expanded modes, writes to this bit has no effect. E clock is required for
de-multiplexing the external address. NECLK can be written once in
normal single chip mode and can be written anytime in special single
chip mode.
0 = PE4 is the external E-clock.
1 = PE4 is a general-purpose I/O pin.
LSTRE: Low strobe (LSTRB) enable. Can be read anytime.
In normal modes: write once; special modes: write anytime. This bit has no
effect in single-chip modes or normal expanded narrow mode.
0 = PE3 is a general-purpose I/O pin.
1 = PE3 is configured as the LSTRB bus-control output, provided the
HCS12 is not in single chip or normal expanded narrow modes.
RDWE: Read/write enable. Can be read anytime.
In normal modes: write once; special modes: write anytime except the
first time. This bit has no effect in single-chip modes.
0 = PE2 is a general-purpose I/O pin
1 = PE2 is configured as the R/W pin. In single-chip modes, RDWE has
no effect and PE2 is a general-purpose I/O pin.
R/W is used for external writes. After reset in normal expanded mode, it
is disabled. If needed it should be enabled before any external writes.
Figure 7.6 PEAR register
7
6
5
4
3
2
1
0
MODC
MODB
MODA
0
IVIS
0
EMK
EME
MODC, MODB, MODA: mode select bits
000 = special single chip mode
001 = emulation narrow mode
010 = special test mode
011 = emulation wide mode
100 = normal single chip mode
101 = normal expanded narrow mode (external memory data bus is 8-bit)
110 = special peripheral mode
111 = normal expanded wide mode (external memory data bus is 16-bit)
IVIS: internal visibility
0 = No visibility of internal bus operations on external bus
1 = Internal bus operations are visible on external bus
EMK: emulate Port K
0 = PTK and DDRK are in memory map and port K can be used in general I/O
1 = If in any expanded mode, PTK and DDRK are removed from memory map
EME: emulate Port E
0 = PTE and DDRE are in the memory map so Port E can be used for general I/O
1 = If in any expanded mode or special peripheral mode, PORTE and DDRE are
removed from memory map and hence allows the user to emulate the function
of these registers externally.
Figure 7.7 The MODE register
reset:
7
6
5
4
3
2
1
0
PUPKE
0
0
PUPEE
0
0
PUPBE
PUPAE
1
0
0
1
0
0
0
0
PUPKE: pull-up Port K enable
0 = Port K pull-up resistors are disabled
1 = Port K pull-up resistors are enabled
PUPEE: pull-up Port E enable
0 = Port E input pins 7 and 4-0, pull-up resistors are disabled
1 = Port E input pins 7 and 4-0, pull-up resistors are enabled
PUPBE: pull-up Port B enable
0 = Port B pull-up resistors are disabled
1 = Port B pull-up resistors are enabled
PUPAE: pull-up Port A enable
0 = Port A pull-up resistors are disabled
1 = Port A pull-up resistors are enabled
Figure 7.8 Pull-Up control register
reset:
7
6
5
4
3
2
1
0
RDPK
0
0
RDPE
0
0
RDPB
RDPA
1
0
0
1
0
0
0
0
RDPK: reduced drive of Port K
0 = All Port K pins have full drive enabled
1 = All Port K pins have reduced drive enabled
RDPE: reduced drive of Port E
0 = All Port E pins have full drive enabled
1 = All Port E pins have reduced drive enabled
RDPB: reduced drive of Port B
0 = All Port B pins have full drive enabled
1 = All Port B pins have reduced drive enabled
RDPA: reduced drive of Port A
0 = All Port A pins have full drive enabled
1 = All Port A pins have reduced drive enabled
Figure 7.9 Reduced Drive Register (RDRIV)
Port K
• Has PTK and DDRK
registers
• Carries expanded address
XADDR14…XADDR19 in
expanded mode
• On the rising edge of the
RESET signal, the value of
the PK7 pin is latched into
the ROMON bit of the MISC
register in expanded mode.
If it is 1, the on-chip flash
memory is enabled.
– ROMON is forced to 1 in
single chip mode.
PK0/X14
PK1/X15
PK2/X16
PK3/X17
PK4/X18
PK5/X19
PK6/XCS
(only available in H sub-family)
PK7/ECS/ROMONE
Figure 7.10 Port K pins and their alternate functions
Port T
•
Has Port T data register (PTT), Port T
data direction register (DDRT), Port input
register (PTIT), reduced drive register
(RDRT), pull device enable register
(PERT), and port polarity select register
(PPST)
– The PTIT register allows the user to read
back the status of Port T pins.
– The RDRT register can configure the drive
strength (current output) of each port pin
as either full or reduced load.
– The PERT register is used to enable an
input Port T pin pull-up or pull-down
device.
– The PPST register selects whether a pulldown or pull-down device is connected to
the pin.
•
Port T pins are also used as timer input
capture/output compare pin.
PT0/IOC0
PT1/IOC1
PT2/IOC2
PT3/IOC3
PT4/IOC4
PT5/IOC5
PT6/IOC6
PT7/IOC7
Figure 7.14 Port T pins and their alternate functions
7
6
5
4
3
2
1
0
RDRT7
RDRT6
RDRT5
RDRT4
RDRT3
RDRT2
RDRT1
RDRT0
0
0
0
0
0
0
0
0
reset:
RDRT[7:0]: Reduced drive Port T
0 = full drive strength at output
1 = associated pin drives at about 1/3 of the full drive strength
Figure 7.11 Port T Reduced Drive register (RDRT)
reset:
7
6
5
4
3
2
1
0
PERT7
PERT6
PERT5
PERT4
PERT3
PERT2
PERT1
PERT0
0
0
0
0
0
0
0
0
PERT[7:0]: pull device enable Port T
0 = pull-up or pull-down is disabled
1 = either pull-up or pull-down is enabled
Figure 7.12 Port T Pull Device Enable register (PERT)
reset:
7
6
5
4
3
2
1
0
PPST7
PPST6
PPST5
PPST4
PPST3
PPST2
PPST1
PPST0
0
0
0
0
0
0
0
0
PPST[7:0]: pull device enable Port T
0 = A pull-up device is connected to the associated ort T pin , if enabled
by the associated bit in register PERT and if the port is used as
input or as wired-or output
1 = A pull-down device is connected to the associated Port T pin, if enabled
by the associated bit in register PERT and if the port is used as input
Figure 7.13 Port T Polarity Select register (PPST)
Port S
• Port S pins are used as general I/O, serial communication interface,
and serial peripheral interface pins.
• Port S has a Port S wired-or mode register (WOMS) in addition to all
registers associated with Port T.
7
6
5
4
3
2
1
0
WOMS7 WOMS6 WOMS5 WOMS4 WOMS3 WOMS2 WOMS1 WOMS0
reset:
0
0
0
0
0
0
0
0
WOMS[7:0]: Wired-or mode Port S
0 = Output buffers operate as push-pull outputs
1 = Output buffers operate as open-drain outputs
Figure 7.15 Port S Wired-Or Mode register (WOMS)
PS0/RXD0
PS1/TXD0
PS2/RXD1
PS3/TXD1
PS4/MISO0
PS5/MOSI0
PS6/SCK0
PS7/SS0
Figure 7.16 Port S pins and their alternate functions
Port M
• Port M has all the
equivalent registers that
Port S has and also a
module routing register
(MODRR).
– The MODRR configures
the rerouting of CAN0,
CAN4, SPI0, SPI1, and
SPI2 on defined port pins.
PM0/RXCAN0/RXB
PM1/TXCAN0/TXB
PM2/RXCAN1/RXCAN0/MISO0
PM3/TXCAN1/TXCAN0/SS0
PM4/RXCAN2/RXCAN0/RXCAN4/MOSI0
PM5/TXCAN2/TXCAN0/TXCAN4/SCK0
PM6/RXCAN3/RXCAN4
PM7/TXCAN3/TXCAN4
Figure 7.18 Port M pins and their alternate functions
7
0
reset:
6
5
4
3
2
1
0
MODRR6 MODRR5 MODRR4 MODRR3 MODRR2 MODRR1 MODRR0
0
0
0
0
CAN0 routing
0
0
0
0
SPI0 routing
MODRR1
MODRR0
0
0
1
1
0
1
0
1
RXCAN0
TXCAN0
PM1
PM0
PM31
PM21
PM52
PM42
reserved
MODRR4
0
1
MODRR3
MODRR2
0
0
1
1
0
1
0
1
RXCAN4
TXCAN4
PJ7
PJ6
PM53
PM43
PM74
PM64
reserved
PS4
PM25
PS5
PM46
SCK0
SS0
PS6
PM56
PS7
PM35
SCK1
SS1
PP2
PH2
PP3
PH3
SCK2
SS2
PP7
PH6
PP6
PH7
SPI1 routing
MODRR5
CAN4 routing
MISO0 MOSI0
0
1
MISO1 MOSI1
PP0
PH0
PP1
PH1
SPI2 routing
MODRR6
0
1
MISO2 MOSI2
PP4
PH4
PP5
PH5
Note: 1. Routing to this pin takes effect only if CAN1 is disabled.
2. Routing to this pin takes effect only if CAN2 is disabled.
3. Routing to this pin takes effect only if CAN2 disabled and CAN0 disabled if
routed here.
4. Routing to this pin takes effect only if CAN3 is disabled.
5. Routing to this pin takes effect only if CAN1 disabled and CAN0 disabled if
routed here.
6. Routing to this pin takes effect only if CAN2 is disabled and CAN0 disabled if
routed here and CAN4 disabled if routed here
Figure 7.17 Module Routing register (MODRR)
• Example 7.1 Give an instruction to configure the MODRR
register to achieve the following port routing:
1. CAN0: use pins PM1 and PM0
2. CAN1: use pins PM3 and PM2
3. CAN2: use pins PM5 and PM4
4. CAN3: use pins PM7 and PM6
5. I2C: use PJ7 and PJ6
6. SPI0: use pins PS7~PS4
7. SPI1: use pins PH3~PH0
8. SPI2: use pins PH7~PH4
• Solution: This routing requirement can be achieved by
preventing CAN4 from using any port pins and keep the default
routing after reset.
-The following instruction will satisfy the requirement:
movb #$60,MODRR
; CAN4 must be disabled
• Example 7.2 Give an instruction to configure the MODRR register to
achieve the following port routing:
1. CAN0: use pins PM1 and PM0
2. CAN1: use pins PM3 and PM2
3. CAN2: disabled
4. CAN3: disabled
5. I2C: use PJ7 and PJ6
6. SPI0: use pins PS7~PS4
7. SPI1: use pins PP3~PP0
8. SPI2: use pins PH7~PH4
• Solution: This routing requirement can be satisfied by the following
instruction:
movb
#$40,MODRR
; CAN2~CAN4 must be disabled
Port H, J, and P
•
These three I/O ports have the same set of registers:
–
–
–
–
–
–
–
–
•
•
•
•
Port I/O register (PTH, PTJ, PTP)
Port Input Register (PTIH, PTIJ, PTIP)
Port Data Direction Register (DDRH, DDRJ, DDRP)
Port Reduced Drive Register (RDRH, RDRJ, RDRP)
Port Pull Device Enable Register (PERH, PERJ, PERP)
Port Polarity Select Register (PPSH, PPSJ, PPSP)
Port Interrupt Enable Register (PIEH, PIEJ, PIEP)
Port Interrupt Flag Register (PIFH, PIFJ, PIFP)
These ports have edge-triggered interrupt capability in the wired-OR
fashion.
The SPI function pins can be rerouted to Port H and P.
The interrupt edges can be rising or falling and are programmed through
Port Device Enable Register and Port Polarity Select Register.
The Port Interrupt Register allows the user to enable interrupts on these
three ports.
7
6
5
4
3
2
1
0
PIEH7
PIEH6
PIEH5
PIEH4
PIEH3
PIEH2
PIEH1
PIEH0
0
0
0
0
0
0
0
0
reset:
PIEH[7:0]: Interrupt enable Port H
0 = interrupt is disabled
1 = interrupt is enabled
Figure 7.19 Port H Interrupt Enable Register (PIEH)
reset:
7
6
5
4
3
2
1
0
PIFH7
PIFH6
PIFH5
PIFH4
PIFH3
PIFH2
PIFH1
PIFH0
0
0
0
0
0
0
0
0
PIFH[7:0]: Interrupt flag Port H
0 = no active edge pending
1 = active edge has occurred (writing a '1' clears the associated flag)
Figure 7.20 Port P Interrupt Flag Register (PIFH)
PH0/MISO1/KWH0
PH1/MOSI1/KWH1
PJ0/KWJ0
PH2/SCK1/KWH2
PJ1/KWJ1
PH3/SS1/KWH3
PJ6/KWJ6/RXCAN4/SDA/RXCAN0
PH4/MISO2/KWH4
PJ7/KWJ7/TXCAN4/SCL/TXCAN0
PH5/MOSI2/KWH5
Figure 7.22 Port J pins and their alternate functions
PH6/SCK2/KWH6
PH7/SS2/KWH7
Figure 7.21 Port H pins and their alternate functions
PP0/MISO1/PWM0/KWP0
PP1/MOSI1/PWM1/KWP1
PP2/SCK1/PWM2/KWP2
PP3/SS1/PWM3/KWP3
PP4/MISO2/PWM4/KWP4
PP5/MOSI2/PWM5/KWP5
PP6/SS2/PWM6/KWP6
PP7/SCK2/PWM7/KWP7
Figure 7.23 Port P pins and their alternate functions
Port AD0 and AD1
• Many HCS12 devices have two 8-channel A/D converters (AD0 and
AD1).
• Device that has only one 8-channel module is referred to as AD.
• When A/D functions are disabled, these two ports can be used as
general input port.
• These two ports do not have data direction registers.
• Each module has a Digital Input Enable Register. In order to use an
A/D pin as a digital input, one needs to set its associated bit in this
register.
reset:
7
6
5
4
3
2
1
0
IEN7
IEN6
IEN5
IEN4
IEN3
IEN2
IEN1
IEN0
0
0
0
0
0
0
0
0
IENx: ATD digital input enable on channel x
0 = disable digital input buffer to PTADx pin
1 = enable digital input buffer to PTADx pin
Figure 7.24 ATD Input enable register (ATD0DIEN and ATD1DIEN)
Electrical Characteristic
Consideration for I/O Interfacing
• When interfacing I/O device to the MCU, one needs to
consider electrical compatibility issues.
– There are two electrical compatibility issues:
• Voltage level compatibility
• Current drive capability
• There are many IC technologies in use. Some are
bipolar, whereas others are unipolar (mainly CMOS and
BICMOS).
• Voltage parameters related to electrical compatibility
–
–
–
–
Input high voltage (VIH)
Input low voltage (VIL)
Output high voltage (VOH)
Output low voltage (VOL)
For Device X to Drive Device Y Correctly
• The output high voltage of device X (VOHX) must be
higher than the input high voltage of device Y (VIHY).
• The output low voltage of device X (VOLX) must be
lower than the input low voltage of device Y (VILY).
• The input and output voltage levels of several popular
logic families are shown in Table 7.3.
• At the same power supply level, the CMOS device has
no problem in driving the bipolar and CMOS devices.
• Bipolar devices have problem in driving CMOS devices.
• HCS12 cannot be driven by bipolar devices.
• Bipolar devices have problems driving CMOS devices
(including HCS12).
Table 7.3 Input and output voltage levels of common logic families
Logic family
VCC
VIH
VOH
VIL
VOL
HCS123
S4
LS4
AS4
F4
HC3
HCT3
ACT3
ABT5
BCT5
FCT5
5V
5V
5V
5V
5V
5V
5V
5V
5V
5V
5V
3.25 V
2V
2V
2V
2V
3.5 V
3.5 V
2V
2V
2V
2V
4.2 V
3.0~3.4 V1
3.0~3.4 V1
3.0~3.4 V1
3.4 V
4.9 V
4.9 V
4.9 V
3V
3.3 V
2.4 V
1.75 V
0.8 V
0.8 V
0.8 V
0.8 V
1.5 V
1.5 V
0.8 V
0.8 V
0.8 V
0.8 V
0.8 V
0.4~0.5 V2
0.4~0.5 V2
0.35 V
0.3 V
0.1 V
0.1 V
0.1 V
0.55 V
0.42 V
0.55 V
Notes.
1. VOH value will get lower when output current is larger.
2. VOL value will get higher when output current is larger. The VOL
values of different logic gates are slightly different.
3. HCS12, HC, HCT, ACT are based on the CMOS technology.
4. S, LS, AS and F logic families are based on the bipolar technology.
5. ABT, BCT, and FCT are using the Bi-CMOS technology.
Current Drive Capability
• The device that drives other devices must have enough sourcing
(supply current) and sinking (absorb current) capability.
• Current flows out from the driving device when the driving voltage is
high.
• Current flows into the driving device when the driving voltage is low.
• The driving device must be able to supply (or sink) enough current
needed by those devices being driven for proper operation.
• If a device cannot source or sink enough current, then using buffer
device is a common solution.
• The current capabilities of a logic device are determined by the
following currents:
–
–
–
–
Input high current (IIH)
Input low current (IIL)
Output high current (IOH)
Output low current (IOL)
• The current capability of several logic chip families are shown in
Table 7.4.
1. The IOH of an output pin must be equal to or larger than the total current
flowing into all the peripheral pins that are connected to this pin.
2. The IOL of an output pin must be equal to or larger than the total current
flowing out from all the peripheral pins that are connected to this pin.
Table 7.4 Current capabilities of common logic families1
Logic family
VCC
HCS1223
S
LS
AS
F
HC3
HCT3
ACT3
ABT3
BCT
FCT3
5V
5V
5V
5V
5V
5V
5V
5V
5V
5V
5V
IIH
2.5 A
50 A
20 A
20 A
20 A
1 A
1 A
1 A
1 A
20 A
1 A
IIL
IOH
IOL
2.5 A
1.0 mA
0.2 mA
0.5 mA
0.5 mA
1 A
1 A
1 A
1 A
1 mA
1 A
25 mA
1 mA
15 mA
15 mA
1 mA
25 mA
25 mA
24 mA
32 mA
15 mA
15 mA
25 mA
20 mA
24 mA
64 mA
20 mA
25 mA
25 mA
24 mA
64 MA
64 mA
64 mA
Notes.
1. Values are based on the 74xx244 of Texas Instrument (xx is the technology name)
2. The total HCS12 supply current is 65 mA.
3. The values for IIH and IIL are input leakage currents.
Timing Compatibility
• There is no timing problem when driving a peripheral pin that does
not contain latches or flip-flops.
• When driving a latch or flip-flop device, one needs to make sure that
the data set up time (tSU) and data hold time (tHD) are both satisfied.
• The data setup time and data hold time requirements are illustrated
in Figure 7.28.
Q
D
CLK
(a)
Q
D
tsu
thd
CLK
(b)
Figure 7.28 D flip-flop and its latching timing requirement
Interfacing with LED Devices
• Figure 7.29 suggests three methods for interfacing with LEDs.
• Circuit (a) and (b) are recommended for LEDs that need only small
current to light.
• Circuit (c) is recommended for LEDs that need larger current to light.
VCC
Port
pin
VCC
R1
Port
pin
(a) positive direct drive
R2
(b) inverse direct
drive
Port
pin
74HC04
R3
(c) buffered drive
Figure 7.29 An LED connected to a CMOS inverter through a current- limiting resistor.
• Example 7.3 Use Port B to drive eight LEDs using the circuit
shown in Figure 7.30. Light each LED for half a second in turn
and repeat assuming the HCS12 has a 24-MHz E clock.
HCS12
1.5K
PB7
PB6
PB5
PB4
PB3
PB2
PB1
PB0
Figure 7.30 Circuit connection for example 7.3
- To turn on one LED at a time for half a second in turn, one should output the
value $80, $40, $20, $10, $08,$04,$02, and $01 and stay for half a second in
each value.
The assembly program that performs the operation is as follows:
forever
led_lp
led_tab
#include "C:\miniide\hcs12.inc"
org
$1500
movb
#$FF,DDRB
; configure port B for output
bset
DDRJ,$02
; configure PJ1 pin for output
bclr
PTJ,$02
; enable LEDs to light
ldaa
#16
; initialize loop count to 8
ldx
#led_tab
; use X as the pointer to LED pattern table
movb
1,x+,PTB
; turn on one LED
ldy
#5
; wait for half a second
jsr
delayby100ms
;
"
dbne
a,led_lp
; reach the end of the table yet?
bra
forever
; start from beginning
dc.b
$80,$40,$20,$10,$08,$04,$02,$01
dc.b
$01,$02,$04,$08,$10,$20,$40,$80
#include "C:\miniide\delay.asm"
end
The C language version of the program is as follows:
#include "c:\egnu091\include\hcs12.h"
#include "c:\egnu091\include\delay.c"
main (void)
{
char led_tab[8] = {0x80,0x40,0x20,0x10,0x08,0x04,0x02,0x01,
0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80};
char i;
DDRB = 0xFF;
/* configure port B for output */
DDRJ |= 0x02;
/* configure PJ1 pin for output (needed for DRAGON12 board only) */
PTJ
&= 0xFD; /* enable LEDs to light (needed for DRAGON12 board only)*/
while (1){
for (i = 0; i < 16; i++) {
PTB = led_tab[i];
delayby100ms(5);
}
}
return 0;
}
Driving a Single Seven-Segment Display
• A common cathode seven-segment display is driven by the
74HC244 via resistors.
• The output high voltage of the 74HC244 is close to 5V with a 5V
power supply.
• The segment patterns for 0 to 9 are shown in Table 7.5.
PB0
a
74HC244
PB6
PB5
PB4
PB3
PB2
PB1
Table 7.5 BCD to seven-segment decoder
300 each
HCS12
BCD
digit
a
b f
c
b
g
d
e e
c
f
d
g
common cathode
Figure 7.31 Driving a single seven-segment display
0
1
2
3
4
5
6
7
8
9
Segments
a b c d e f g
1
0
1
1
0
1
1
1
1
1
1
1
1
1
1
0
0
1
1
1
1
1
0
1
1
1
1
1
1
1
1
0
1
1
0
1
1
0
1
1
1
0
1
0
0
0
1
0
1
0
1
0
0
0
1
1
1
0
1
1
0
0
1
1
1
1
1
0
1
1
Corresponding
Hex Number
$7E
$30
$6D
$79
$33
$5B
$5F
$70
$7F
$7B
Driving Multiple Seven-Segment Displays
#5
300
300
a
b
.
.
.
g
74HC244
PB6
PB5
PB0
c ommon
cathode
R
PK5
PK0
#0
. . . a
. . . b
. . .
c ommon
cathode
2N2222
R
PK4
#4
a
. b
.
.
g
.
.
.
2N2222
R
g
c ommon
cathode
IMAX = 70 mA
• Time multiplexing
technique is often used
to drive multiple
displays in order to
save I/O pins.
• One parallel port is
used to drive the
segment pattern and
the other port turns on
one display at a time.
Each display is turned
on and then off many
times within a second.
The persistence of
vision make us feel that
all displays are turned
on simultaneously.
2N2222
HCS12
Figure 7.32 Port B and Port K together drive six seven-segment displays (MC9S12DP256)
• Example 7.4 Write a sequence of instructions to display 4 on the
seven-segment display #4 in Figure 7.32.
• Solution: To display the digit 4 on the display #4, we need to:
– Output the hex value $33 to port B
– Set the PK4 pin to 1
– Clear pins PK5 and PK3...P0 to 0
four
#include <hcs12.inc>
equ
$33
movb
#$3F,DDRK
movb
#$FF,DDRB
bset
PTK,$10
bclr
PTK,$2F
movb
#four,PTB
In C language:
DDRK
DDRB
PTK
PTB
= 0x3F;
= 0xFF;
= 0x10;
= 0x33;
; seven-segment pattern of digit 4
; configure PORT K for output
; configure PORT B for output
; turn on seven-segment display #4
; turn off seven-segment displays #5, #3…#0
; output the seven-segment pattern to PORTP
• Example 7.5 Write a program to display 123456 on the
six seven-segment displays shown in Figure 7.32.
• Solution: Display 123456 on display #5, #4, #3, #2, #1,
and #0, respectively.
• The values to be output to Port B and Port K to display
one digit at a time is shown in Table 7.6.
Table 7.6 Table of display patterns for Example 7.5
seven-segment
displayed
Port K
Port B
display
BCD digit
#5
#4
#3
#2
#1
#0
1
2
3
4
5
6
- The program logic is shown in Figure 7.33.
$30
$6D
$79
$33
$5B
$5F
$20
$10
$08
$04
$02
$01
Start
X address of display table
Output the byte at [X] to port B
Output the byte at [X]+1 to Port K
Increment X by 2
Wait for 1 ms
no
X = display + 12?
yes
Figure 7.33 Time-multiplexed seven-segment display algorithm
#include
pat_port equ
pat_dir equ
sel_port equ
sel_dir
equ
org
movb
movb
forever ldx
loop
movb
movb
ldy
jsr
cpx
bne
bra
#include
disp_tab dc.b
dc.b
dc.b
dc.b
dc.b
dc.b
end
"c:\miniide\hcs12.inc"
PTB
; Port that drives the segment pattern
DDRB
; direction register of the segment pattern
PTK
; Port that selects the digit
DDRK
; data direction register of the digit select port
$1500
#$FF,pat_dir
; configure pattern port for output
#$3F,sel_dir
; configure digit select port for output
#disp_tab
; use X as the pointer
1,x+,pat_port
; output digit pattern and move the pointer
1,x+,sel_port
; output digit select value and move the pointer
#1
; wait for 1 ms
delayby1ms
; “
#disp_tab+12
; reach the end of the table
loop
forever
"c:\miniide\delay.asm"
$30,$20
; seven-segment display table
$6D,$10
$79,$08
$33,$04
$5B,$02
$5F,$01
#include “c:\egnu091\include\hcs12.h”
#include “c:\egnu091\include\delay.c”
#define pat_port
PTB
/* segment pattern port */
#define pat_dir
DDRB
/* pattern port data direction register */
#define sel_port
PTK
/* digit select port */
#define sel_dir
DDRK
/* digit select port direction register */
main (void)
{
char disp_tab[6][2] = {{0x30,0x20},{0x6D,0x10},{0x79,0x08},
{0x33,0x04},{0x5B,0x02},{0x5F,0x01}};
char i;
pat_dir = 0xFF;
/* configure pat_port for output */
sel_dir = 0x3F;
/* configure sel_port for output */
while (1) {
for (i = 0; i < 6; i++) {
pat_port = disp_tab[i][0];
/* output the segment pattern */
sel_port = disp_tab[i][1];
/* turn on the display */
delaybyms(1);
/* wait for 1 ms */
}
}
return 0;
}
Liquid Crystal Display (LCD) (1 of 2)
• The basic construction of an LCD is illustrated in Figure
7.34.
• The most common type of LCD allows the light to pass
through when activated.
• An LCD segment is activated when a low frequency
bipolar signal in the range of 30 Hz to 1KHz is applied to
it.
• LCD can display characters and graphics.
• LCDs are often sold in a module with LCDs and
controller unit built in.
• The Hitachi HD44780 is the most popular LCD controller
being used today.
Liquid Crystal Display (LCD) (2 of 2)
Segment
Frontplane
Glass
Backplane
Liquid crystal
Black cardboard backing
Figure 7.34 A liquid crystal display (LCD)
A HD44780-Based LCD Kit (1 of 3)
•
•
•
•
•
•
•
•
Display capability: 4 x 20
Uses the HD44780 as the controller as shown in Figure 7.35.
Pins DB7~DB0 are used to exchange data with the CPU.
E input should be connected to one of the address decoder output or I/O pin.
The RS signal selects instruction register (0) or data register (1).
The VEE signal allows the user to adjust the LCD contrast.
The HD44780 can be configured to display 1-line, 2-line, and 4-line information.
The pin assignment for character-based LCD module with less than and more than 80 characters
are shown in Table 7.7 and 7.8.
DB7
COM 16
LCDP (FRD7069)
DB0
E
R/W
RS
VEE
VCC
VSS
CONTROLLER
LSI
HD44780
SEG 40
SEG 160
4
SEGMENT DRIVER x 4
Figure 7.35 Block diagram of a HD44780-based LCD kit
A HD44780-Based LCD Kit (2 of 3)
Table 7.7 Pin assignment for displays with less than 80 characters
Pin No.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
symbol
I/O
Function
VSS
VCC
VEE
RS
R/W
E
DB0
DB1
DB2
DB3
DB4
DB5
DB6
DB7
I
I
I
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
Power supply (GND)
Power supply (+5V)
Contrast adjust
0 = instruction input, 1 = data input
0 = write to LCD, 1 = read from LCD
enable signal
data bus line 0
data bus line 1
data bus line 2
data bus line 3
data bus line 4
data bus line 5
data bus line 6
data bus line 7
A HD44780-Based LCD Kit (3 of 3)
Table 7.8 Pin assignment for displays with more than 80 characters
Pin No.
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
symbol
I/O
DB7
DB6
DB5
DB4
DB3
DB2
DB1
DB0
E1
R/W
RS
VEE
VSS
VCC
E2
N.C
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I/O
I
I
I
I
-
Function
data bus line 7
data bus line 6
data bus line 5
data bus line 4
data bus line 3
data bus line 2
data bus line 1
data bus line 0
enable signal row 0 & 1
0 = write to LCD, 1 = read from LCD
0 = instruction input, 1 = data input
Contrast adjust
Power supply (GND)
Power supply (+5V)
Enable signal row 2 & 3
HD44780 Commands (1 of 4)
Table 7.9 HD44780U instruction set
Code
Instruction
RS R/W B7 B6 B5 B4 B3 B2 B1 B0
Description
Clear display
0
0
0
0
0
0
0
0 0
1
Cursor home
0
0
0
0
0
0
0
0 1
*
Entry mode set
0
0
0
0
0
0
0
1 I/D S
Display on/off
control
0
0
0
0
0
0
1
D C
B
Cursor /display
shift
0
0
0
0
0
1 S/C R/L *
*
Function set
0
0
0
0
1 DL N
Set CGRAM
address
Set DDRAM
address
Read busy flag
and address
counter
0
0
0
1
CGRAM address
0
0
1
DDRAM address
0
1
BF
CGRAM/DDRAM
address
Write CGRAM
or DDRAM
Read from
CGRAM or
DDRAM
1
0
write data
Clears display and returns cursor to the
home position (address 0).
Returns cursor to home position (address
0). Also returns display being shifted to the
original position. DDRAM contents remain
unchanged.
Set cursor move direction (I/D), specifies
to shift the display (S). These operations
are performed during data read/write.
Sets on/off of all display (D), cursor on/
off (C) and blink of cursor position
character (B).
Sets cursor-move or display-(S/C), shift
direction (R/L). DDRAM contents remains
unchanged.
Sets interface data length (DL), number of
display line (N) and character font (F).
Sets the CGRAM address. CGRAM data is
sent and received after this setting.
Sets the DDRAM address. DDRAM data is
sent and received after this setting.
Reads busy flag (BF) indicating internal
operation is being performed and reads
CGRAM or DDRAM address counter
contents (depending on previous
instruction).
Writes data to CGRAM or DDRAM.
1
1
read data
Reads data from CGRAM or DDRAM.
F
*
*
Execution
time
1.64 ms
1.64 ms
40 s
40 s
40 s
40 s
40 s
40 s
0 s
40 s
40 s
HD44780 Commands (2 of 4)
Table 7.10 LCD instruction bit names
Bit name
I/D
S
D
C
B
S/C
R/L
DL
N
F
BF
Settings
0 = decrement cursor position.
0 = no display shift.
0 = display off
0 = cursor off
0 = cursor blink off
0 = move cursor
0 = shift left
0 = 4-bit interface
0 = 1/8 or 1/11 duty (1 line)
0 = 5x8 dots
0 = can accept instruction
1 = increment cursor position
1 = display shift
1 = display on
1 = cursor on
1 = cursor blink on
1 = shift display
1 = shift right
1 = 8-bit interface
1 = 1/16 duty (2 lines)
1 = 5 x 10 dots
1 = internal operation in progress
HD44780 Commands (3 of 4)
• The HD44780 has a display data RAM (DDRAM) to store data to be
displayed on the LCD.
• The address range of DDRAM for 1-line, 2-line, and 4-line LCDs are
shown in Table 7.11a, 7.11b, and 7.11c.
• The HD44780 has a character generator ROM that can generates 5
8 or 5 10 character patterns from a 8-bit code.
• The user can rewrite character patterns into the character generator
RAM (CGRAM).
• Up to eight 5 8 patterns or four 5 10 patterns can be
programmed.
Table 7.11a DDRAM address usage for a 1-line LCD
Display size
1*8
1 * 16
1 * 20
1 * 24
1 * 32
1 * 40
Visible
character positions
DDRAMaddresses
00..07
00..15
00..19
00..23
00..31
00..39
0x00..0x07
0x00..0x0F
0x00..0x13
0x00..0x17
0x00..0x1F
0x00..0x27
HD44780 Commands (4 of 4)
Table 7.11b DDRAM address usage for a 2-line LCD
Display size
2 * 16
2 * 20
2 * 24
2 * 32
2 * 40
Visible
character positions
DDRAM addresses
00..15
00..19
00..23
00..31
00..39
0x00..0x0F + 0x40..0x4F
0x00..0x13 + 0x40..0x53
0x00..0x17 + 0x40..0x57
0x00..0x1F + 0x40..0x5F
0x00..0x27 + 0x40..0x67
Table 7.11c DDRAM address usage for a 4-line LCD
Display size
4 * 16
4 * 20
4 * 40
Visible
character positions
00..15
00..19
00..39 on 1st controller
and 00..39 on 2nd
controller
DDRAM addresses
0x00..0x0F + 0x40..0x4F + 0x14..0x23 + 0x54..0x63
0x00..0x13 + 0x40..0x53 + 0x14..0x27 + 0x54..0x67
0x00..0x27 + 0x40..0x67 on 1st controller and
0x00..0x27 + 0x40..0x67 on 2nd controller
Registers of HD44780
•
•
•
•
•
•
•
The HD44780 has two 8-bit user accessible registers: instruction register
(IR) and data register (DR).
To write data into display data RAM or character generator RAM, the MCU
writes into the DR register.
The address of the data RAM should be set up with a previous instruction.
The DR register is also used for data storage when reading data from
DDRAM or CGRAM.
The register selection is shown in Table 7.12.
The HD44780 has a busy flag that is output from the DB7 pin.
The HD44780 uses a 7-bit address counter to keep track of the address of
the next DDRAM or CGRAM location to be accessed.
Table 7.12 Register selection
RS
R/W
0
0
1
1
0
1
0
1
Operation
IR write as an internal operation (display clear, etc)
Read busy flag (DB7) and address counter (DB0 to DB6)
DR write as an internal operation (DR to DDRAM or CGRAM)
DR read as an internal operation (DDRAM or CGRAM to DR)
HD44780 Instructions (1 of 3)
• Clear display
– Writes 0x20 (space character) to all DDRAM locations
– Sets 0 to the address counter (return cursor to upper left corner of the
LCD)
– Sets increment mode
• Return home
– Sets address counter to 0
– DDRAM contents not changed
• Entry mode set
– Sets incrementing or decrementing of the DDRAM address
– Controls the shifting (shifts if S bit = 1) of the display
• Display on/off control
– Turns on/off display
– Turns on/off cursor
– Turns on/off cursor blinking
HD44780 Instructions (2 of 3)
• Cursor or display shift
– This function shifts the cursor position to the right or left without writing
or reading display data.
– The shifting is controlled by two bits as shown in Table 7.13.
Table 7.13 LCD Shift function
S/C
R/L
0
0
1
1
0
1
0
1
Operation
Shifts the cursor position to the left. (AC is decremented by 1)
Shifts the cursor position to the right. (AC is incremented by 1)
Shifts the entire display to the left. The cursor follows the display shift.
Shifts the entire display to the right. The cursor follows the display shift.
• Function set
– Sets the interface length (DL bit) to be 4- or 8-bit
– Selects the number of lines (N bit) to be one or two lines
– Selects character font (F bit) to be 5 8 or 5 10
HD44780 Instructions (3 of 3)
• Set CGRAM address
– This command contains the address to be written into the
address counter.
• Set DDRAM address
– This command allows the user to set the starting address to
display information.
• Read busy flag and address
– This command reads the busy flag and the address counter.
– User can use this command to determine the LCD controller is
ready to accept another command.
– User can use this command to control where to start displaying
information.
Interfacing the HD44780 with the HCS12
• One can treat the LCD kit as an I/O device and use an I/O port and
several other I/O pins as control signals.
• The interface can be 4 bits or 8 bits.
• To read or write the LCD successfully, one must satisfy the timing
requirements of the LCD. The timing diagrams for read and write are
shown in Figure 7.37 and 7.38.
HD44780U-based
LCD Module
HCS12 MCU
PK6
E
PK5
R/W
PK4
RS
HD44780U-based
LCD Module
HCS12 MCU
5V
VCC
PK0
RS
PK1
E
5V
DB7..DB0
Figure 7.36a LCD interface example (8-bit bus, used in SSE256)
5V
VEE
PK5...PK2
GND
VCC
R/W
VEE
PH7...PH0
5V
DB7..DB4
GND
Figure 7.36b LCD interface example (4-bit bus, used in Dragon12)
RS
tAH
tA S
R/W
PWEH
tEf
E
t Er
t DDR
t DHR
DB0-DB7
Valid data
t CYCLE
Figure 7.37 HD44780U LCD controller read timing diagram
RS
tAH
tA S
R/W
PWEH
E
t Er
DB0-DB7
tEf
t D SW
tH
Valid data
t CYCLE
Figure 7.38 HD44780U LCD controller write timing diagram
Table 7.15 HD44780U bus timing parameters (2 MHz operation)
Symbol
tCYCLE
PWEH
tEr, tEf
tAS
tDDR
tDSW
tH
tDHR
tAH
•
Meaning
Enable cycle time
Enable pulse width (high level)
Enable rise and decay time
Address setup time, RS, R/W, E
Data delay time
Data setup time
Data hold time (write)
Data hold time (read)
Address hold time
Min
Typ
Max.
Unit
500
230
40
80
10
5
10
-
20
160
-
ns
ns
ns
ns
ns
ns
ns
ns
ns
Procedure to send a command to the IR register
– Step 1
• Pull the RS and the E signals to low.
– Step 2
• Pull the R/W signal to low.
– Step 3
• Pull the E signal to high.
– Step 4
• Output data to the output port attached to the LCD data bus. One needs to configure the
I/O Port for output before writing data to the LCD kit.
– Step 5
• Pull the E signal to low and make sure that the internal operation is complete.
• The procedure for writing a byte to the LCD data register
– Step 1
• Pull the RS signal to high.
– Step 2
• Pull the R/W signal to low.
– Step 3
• Pull the E signal to high.
– Step 4
• Output data to the I/O port attached to the LCD data bus.
– Step 5
• Pull the E signal to low and make sure that the internal operation is
complete.
• These procedures need to be repeated once for an LCD
kit with 4-bit interface.
• Write a function to send a command to the LCD kit
– Most LCD commands are completed in 40 ms.
– If the function waits for 40 ms after performing the specified operation,
then most commands will be completed when the function returns.
– The assembly code for the 8-bit interface is as follows:
lcdPort equ PTH
; LCD data port
lcdCtl
equ PTK
; LCD control port
lcdE
equ $80
; E signal pin (PK7)
lcdRW
equ $20
; R/W signal pin (PK5)
lcdRS
equ $10
; RS signal pin (PK4)
; the command is contained in A
cmd2lcd bclr lcdCtl,lcdRS+lcdRW
; select instruction register and Write
bset lcdCtl,lcdE
; pull the E signal high
staa lcdPort
; send the command, along with RS, E signals
nop
nop
bclr lcdCtl,lcdE
; pull the E signal low
bset lcdCtl,lcdRW
; pull R/W to high
ldy
#1
; adding this delay will complete the internal
jsr
delayby50us
; operation for most instructions
rts
• The function to configure LCD sends four commands to the LCD kit
–
–
–
–
Entry mode set
Display on/off
Function set
Clear display
lcdDIR
equ
lcdCtlDIR equ
openlcd movb
bset
ldy
jsr
ldaa
jsr
ldaa
jsr
ldaa
jsr
ldaa
jsr
ldy
jsr
rts
DDRH
DDRK
#$FF,lcdDIR
lcdCtlDir,$B0
#5
delayby100ms
#$38
cmd2lcd
#$0F
cmd2lcd
#$06
cmd2lcd
#$01
cmd2lcd
#2
delayby1ms
; configure port H for output
; configure control pins for output
; wait for LCD to complete internal
; configuration
; set 8-bit data, 2-line display, 5x8 font
;
"
; turn on display, cursor, and blinking
;
"
; move cursor right (entry mode set instruction)
;
"
; clear LCD screen and return to home position
;
"
; wait until "clear display" command is complete
;
"
• Function to output a character to the LCD
– The character to be output is in accumulator A.
putc2lcd bset
bclr
bset
staa
nop
nop
bclr
bset
ldy
jsr
rts
lcdCtl,lcdRS
lcdCtl,lcdRW
lcdCtl,lcdE
lcdPort
lcdCtl,lcdE
lcdCtl,lcdRW
#1
delayby50us
; select LCD Data register
; enable write to LCD
; pull E to high
; send data to LCD
; provide enough length to E signal
;
"
; pull the E signal low
; pull R/W high to complete the write cycle
; wait until the write operation is
; complete
• Function to output a string terminated by a NULL
character
– The string to be output is pointed to by index register X.
puts2lcd
ldaa
beq
jsr
bra
done_puts rts
1,x+
done_puts
putc2lcd
puts2lcd
; get one character from the string
; reach NULL character?
• Example 7.7 Write an assembly program to test the
previous four subroutines by displaying the following
messages on two lines:
hello world!
I am ready!
#include
lcdPort
lcdDIR
lcdCtl
lcdCtlDir
lcdE
lcdRW
lcdRS
"hcs12.inc"
equ
PTH
; LCD data pins (PH7~PH0)
equ
DDRH
; LCD data direction port
equ
PTK
; LCD control port
equ
DDRK
; LCD control port direction
equ
$80
; E signal pin
equ
$20
; R/W signal pin
equ
$10
; RS signal pin
org
$1500
lds
#$1500
; set up stack pointer
jsr
openlcd
; initialize the LCD
ldx
#msg1lcd
jsr
puts2lcd
ldaa #$C0
; move to the second row
jsr
cmd2lcd
;
"
ldx
#msg2lcd
jsr
puts2lcd
swi
msg1lcd fcc
"hello world!"
dc.b 0
msg2lcd fcc
"I am ready!"
dc.b 0
#include “c:\miniide\delay.asm"
; include delay routines here
; include the previous four LCD functions
#define
#define
#define
#define
#define
#define
void
void
void
void
void
{
lcdPort
PTH
lcdDIR
DDRH
lcdE
0x80
lcdRW
0x20
lcdRS
0x10
lcdCtlDIR DDRK
cmd2lcd (char cmd);
openlcd (void);
putc2lcd (char cx);
puts2lcd (char *ptr);
cmd2lcd (char cmd)
/* Port H drives LCD data pins */
/* Direction of LCD port */
/* E signal (PK7) */
/* R/W signal (PK5) */
/* RS signal (PK4) */
/* LCD control port direction */
char temp;
char xa, xb;
lcdCtl
&= ~(lcdRS+lcdRW); /* select instruction register & pull R/W low */
lcdCtl
|= lcdE;
/* pull E signal to high */
lcdPort
= cmd ;
/* output command */
xa
= 1;
/* dummy statements to lengthen E */
xb
= 2;
/*
"
*/
lcdCtl
&= ~lcdE;
/* pull E signal to low */
lcdCtl
|= lcdRW;
/* pull R/W to high */
delayby50us(1);
/* wait until the command is complete */
}
void openlcd(void)
{
lcdDIR
= 0xFF;
lcdCtlDIR = 0xB0;
delayby100ms(5);
cmd2lcd (0x38);
cmd2lcd (0x0F);
cmd2lcd (0x06);
cmd2lcd (0x01);
delayby1ms (2);
}
/* configure lcdPort port for output */
/* configure LCD control pins for output */
/* wait for LCD to become ready */
/* set 8-bit data, 2-line display, 5x8 font */
/* turn on display, cursor, blinking */
/* move cursor right */
/* clear screen, move cursor to home */
/* wait until "clear display" command is complete */
void putc2lcd(char cx)
{
char temp;
char xa, xb;
lcdCtl
|= lcdRS;
lcdCtl
&= ~lcdRW;
lcdCtl
|= lcdE;
lcdPort = cx;
xa
= 1;
xb
= 2;
lcdCtl
&= ~lcdE;
lcdCtl
|= lcdRW;
delayby50us(1);
}
void puts2lcd (char *ptr)
{
while (*ptr) {
putc2lcd(*ptr);
ptr++;
}
}
/* select LCD data register and pull R/W high*/
/* pull R/W to low */
/* pull E signal to high */
/* output data byte */
/* create enough width for E */
/* create enough width for E */
/* pull E to low */
/* pull R/W signal to high */
• Write a C program to test the SSE256 LCD functions.
#include
"c:\egnu091\include\hcs12.h"
#include
"c:\egnu091\include\delay.c"
#include
“c:\egnu091\include\lcd_util_SSE256.c”
main (void)
{
char *msg1 = "hello world!";
char *msg2 = "I am ready!";
openlcd();
cmd2lcd(0x80);
/* move cursor to the 1st column of row 1 */
puts2lcd(msg1);
cmd2lcd(0xC0);
/* move cursor to 2nd row, 1st column */
puts2lcd(msg2);
return 0;
}
Interfacing with DIP Switches (1 of 2)
• Switches are often grouped together. It is most common
to have four or eight switches in a DIP package.
• DIP switches are often used to provide setup information
to the microcontroller. After power is turned on, the
microcontroller reads the settings of the DIP switches
and performs accordingly.
VCC
SWDIP-8
10K
HCS12
PA0
PA1
PA2
PA3
PA4
PA5
PA6
PA7
Figure 7.39 Connecting a set of eight DIP switches to Port A of the HCS12
Interfacing with DIP Switches (2 of 2)
• Example 7.9 Write a sequence of instructions to read the
value from an eight-switch DIP connected to PORTA of
the HCS12 into accumulator A.
• Solution
#include “c:\miniide\hcs12.inc”
movb
#0,DDRA
; configure Port A for input
ldaa
PTA
; read Port A
In C language:
#include “c:\egnu091\include\hcs12.h”
void main ()
{
char xx;
DDRA = 0;
xx = PTA;
}
Interfacing to a Keyboard
• A keyboard is arranged as an array of switches, which can be
mechanical, membrane, capacitors, or Hall-effect in construction.
• Mechanical switches are most popular for keyboards.
– Mechanical switches have a problem called contact bounce. Closing a
mechanical switch generates a series of pulses because the switch
contacts do not come to rest immediately.
– In addition, a human cannot type more than 50 keys in a second.
Reading the keyboard more than 50 times a second will read the same
key stroke too many times.
• A keyboard input is divided into three steps:
– Scan the keyboard to discover which key has been pressed.
– Debounce the keyboard to determine if a key is indeed pressed. Both
hardware and software approaches for key debouncing are available.
– Lookup the ASCII table to find out the ASCII code of the pressed key.
Hardware
Debouncing Techniques
VDD
Set
Q
R
Q
Reset
Set
Reset
R
(a) Set-reset latch
• SR latches
• Non-inverting CMOS
gates
• Integrating debouncer
VDD
R
4050
Vout
(b) CMOS gate debouncer
VDD
R
H
Vout
Threshold level
C
L
Switch closed
(c) Integrating RC circuit debouncer
Figure 7.42 Hardware debouncing techniques
Software Debouncing Technique
• The most popular and simple one has been the
wait and see method.
– In this method, the program simply waits for about 10
ms and reexamines the same key again to see if it is
still pressed.
ASCII Code Table Lookup
• The ASCII code of each key can be stored in a
table for easy look up.
•
•
•
•
Interfacing the HCS12 to a Keypad
A keypad usually consists of 12 to 24 keys and is adequate for many
applications.
Like a keyboard, a keypad also needs debouncing.
A 16-key keypad can be easily interfaced to one of the HCS12 parallel
ports.
A circuit that interfaces a 16-key keypad is shown in Figure 7.41. In this
Figure, pins PA7..PA4 each control four keys.
HCS12 MCU
PA7
PA6
PA5
PA4
PA3
3
7
B
F
PA2
2
6
A
E
PA1
1
5
9
D
PA0
0
4
8
C
10K
VCC
Figure 7.41 Sixteen-key keypad connected to the HCS12
PA7
PA6
PA5
PA4
1
1
1
0
1
1
0
1
1
0
1
1
0
1
1
1
Selected keys
0, 1,
4, 5,
8, 9,
C, D,
2,
6,
A,
E,
and 3
and 7
and B
and F
Table 7.16 Sixteen-key keypad row selections
• Example 7.10 Write a program to perform keypad scanning,
debouncing, and returns the ASCII code in accumulator A to the
caller.
• Solution
– Pins PA4..PA7 each control one row of four keys.
– Scanning is performed by setting one of the PA7..PA4 pins to low, the
other three pins to high and testing one key at a time.
#include “c:\miniide\hcs12.inc"
keyboard equ
PTA
get_char
scan_r0
scan_k0
scan_k1
scan_k2
scan_k3
key0
key1
movb
movb
brclr
brclr
brclr
brclr
bra
jmp
jmp
#$F0,DDRA
#$EF,keyboard
keyboard,$01,key0
keyboard,$02,key1
keyboard,$04,key2
keyboard,$08,key3
scan_r1
db_key0
db_key1
; set PA7~PA4 for output, PA3~PA0 for input
; scan the row containing keys 0123
; is key 0 pressed?
; is key 1 pressed?
; is key 2 pressed?
; is key 3 pressed?
key2
key3
scan_r1
scan_k4
scan_k5
scan_k6
scan_k7
key4
key5
key6
key7
scan_r2
scan_k8
scan_k9
scan_kA
scan_kB
key8
key9
jmp
jmp
movb
brclr
brclr
brclr
brclr
bra
jmp
jmp
jmp
jmp
movb
bclr
brclr
brclr
brclr
brclr
bra
jmp
jmp
db_key2
db_key3
#$DF,keyboard
keyboard,$01,key4
keyboard,$02,key5
keyboard,$04,key6
keyboard,$08,key7
scan_r2
db_key4
db_key5
db_key6
db_key7
#$BF,keyboard
keyboard,$40
keyboard,$01,key8
keyboard,$02,key9
keyboard,$04,keyA
keyboard,$08,keyB
scan_r3
db_key8
db_key9
; scan the row containing keys 4567
; is key 4 pressed?
; is key 5 pressed?
; is key 6 pressed?
; is key 7 pressed?
; scan the row containing keys 89AB
; “
; is key 8 pressed?
; is key 9 pressed?
; is key A pressed?
; is key B pressed?
keyA
keyB
scan_r3
scan_kC
scan_kD
scan_kE
scan_kF
jmp
jmp
movb
brclr
brclr
brclr
brclr
jmp
keyC
jmp
keyD
jmp
keyE
jmp
keyF
jmp
; debounce key 0
db_key0 jsr
brclr
jmp
getc0
ldaa
rts
; debounce key 1
db_keyA
db_keyB
#$7F,keyboard
keyboard,$01,keyC
keyboard,$02,keyD
keyboard,$04,keyE
keyboard,$08,keyF
scan_r0
db_keyC
db_keyD
db_keyE
db_keyF
; scan the row containing keys CDEF
; is key C pressed?
; is key D pressed?
; is key E pressed?
; is key F pressed?
delay10ms
keyboard,$01,getc0
scan_k1
#$30
; return the ASCII code of 0
db_key1 jsr
brclr
jmp
getc1
ldaa
rts
db_key2 jsr
brclr
jmp
getc2
ldaa
rts
db_key3 jsr
brclr
jmp
getc3
ldaa
rts
db_key4 jsr
brclr
delay10ms
keyboard,$02,getc1
scan_k2
#$31
; return the ASCII code of 1
delay10ms
keyboard,$04,getc2
scan_k3
#$32
; return the ASCII code of 2
delay10ms
keyboard,$08,getc3
scan_r1
#$33
; return the ASCII code of 3
delay10ms
keyboard,$01,getc4
jmp
getc4
ldaa
rts
db_key5 jsr
brclr
jmp
getc5
ldaa
rts
db_key6 jsr
brclr
jmp
getc6
ldaa
rts
db_key7 jsr
brclr
jmp
scan_k5
#$34
; return the ASCII code of 4
delay10ms
keyboard,$02,getc5
scan_k6
#$35
; return the ASCII code of 5
delay10ms
keyboard,$04,getc6
scan_k7
#$36
; return the ASCII code of 6
delay10ms
keyboard,$08,getc7
scan_r2
getc7
db_key8
getc8
db_key9
getc9
db_keyA
getcA
db_keyB
getcB
ldaa
rts
jsr
brclr
jmp
ldaa
rts
jsr
brclr
jmp
ldaa
rts
jsr
brclr
jmp
ldaa
rts
jsr
brclr
jmp
ldaa
rts
#$37
; return the ASCII code of 7
delay10ms
keyboard,$01,getc8
scan_k9
#$38
; return the ASCII code of 8
delay10ms
keyboard,$02,getc9
scan_kA
#$39
; return the ASCII code of 9
delay10ms
keyboard,$04,getcA
scan_kB
#$41
; get the ASCII code of A
delay10ms
keyboard,$08,getcB
scan_r3
#$42
; get the ASCII code of B
db_keyC
getcC
db_keyD
getcD
db_keyE
getcE
db_keyF
getcF
jsr
brclr
jmp
ldaa
rts
jsr
brclr
jmp
ldaa
rts
delay10ms
keyboard,$01,getcC
scan_kD
#$43
; get the ASCII code of C
jsr
brclr
jmp
ldaa
rts
jsr
brclr
jmp
ldaa
rts
delay10ms
keyboard,$04,getcE
scan_kF
#$45
; get the ASCII code of E
delay10ms
keyboard,$02,getcD
scan_kE
#$44
; get the ASCII code of D
delay10ms
keyboard,$08,getcF
scan_r0
#$46
; get the ASCII code of F
delay10ms movb
movb
movb
ldd
addd
std
wait_lp2
brclr
rts
#$90,TSCR1
#$06,TSCR2
#$01,TIOS
TCNT
#3750
TC0
TFLG1,$01,wait_lp2
; enable TCNT & fast flags clear
; configure prescale factor to 64
; enable OC0
; start an output compare operation
; with 10 ms time delay
The AD7302 D/A Converter (1 of 2)
• A dual-channel 8-bit D/A converter made by Analog
Devices
• The AD7302 converts an 8-bit digital value into an
analog voltage.
• The block diagram is shown in Figure 7.43. The AD7302
is designed to be a memory-mapped device. The CS
signal must be low for this chip to work.
• The AD7302 needs a reference voltage to operate. The
reference voltage could be external one (from the REFIN
pin) or the internal VDD.
• Each conversion takes about 2 ms to complete.
The AD7302 D/A Converter (2 of 2)
AD7302
Input
Register
DAC
Register
I DAC A
I/V
VOUT A
D7
D0
Input
Register
DAC
Register
I DAC B
I/V
VOUT B
A/B
WR
CS
Control
Logic
Power On
Reset
MUX
÷2
PD
CLR
LDAC
REFIN
VDD
DGND
Figure 7.24 Functional block diagram of the AD7302
- The output from either DAC is given by
VOUTA/B = 2 × VREF × (N/256)
where, N is the digital value to be converted.
AGND
Using the AD7302 to
Generate Sawtooth Waveform
• Configure PB7…PB0, PJ0…PJ1 for output.
• Output the digital value from 0 to 255 and repeat. For each value,
pull the PJ0 to low and then to high so that the value on pins
PB7..PB0 can be transferred to the AD7302.
• Pull the signal PJ1 to low during the process.
HCS12
5V
AD7302
PB7~PB0
D7..D0
VDD
REFIN
PJ0
PJ1
VDD
WR
PD
CLR
A/B
CS
LDAC
VOUTA
VOUT B
AGND
DGND
Figure 7.44 Circuit connection between the AD7302 and the HCS12
Example 7.10 Write a program to generate a sawtooth waveform from VOUTA pin.
The assembly program is as follows:
#include "c:\miniide\hcs12.inc"
org
$1500
movb #$FF,DDRB
; configure PORTB for output
bset
DDRJ,$03
; configure PJ1~PJ0 for output
bclr
PTJ,$02
; select VOUTA output
loop
inc
PORTB
; increase the output by one step
bclr
PTJ,$01
; generate a rising edge on PJ0 pin
bset
PTJ,$01
;
"
bset
PTJ,$01
; add 9 more “bset” instructions to provide 2 ms
bset
PTJ,$01
; for D/A conversion to complete
bset
PTJ,$01
;
"
bset
PTJ,$01
;
“
bset
PTJ,$01
;
“
bset
PTJ,$01
;
"
bset
PTJ,$01
;
“
bset
PTJ,$01
;
“
bset
PTJ,$01
;
“
bra
loop
; to complete the D/A conversion
end
The C language version of the program is on next page.
#include “c:\egnu091\include\hcs12.h”
void main(void)
{
DDRB
= 0xFF;
/* configure PORTB for output */
DDRJ
|= 0x03;
/* configure pins PJ1~PJ0 for output */
PTJ
&= 0xFD;
/* pull the signal A/B to low too select channel A */
while (1) {
PTB += 1;
PTJ &= 0xFE;
/* generate a rising edge */
PTJ |= 0x01;
/*
“
*/
PTJ |= 0x01;
/* use dummy statements to provide 2 ms */
PTJ |= 0x01;
/* time for D/A conversion to complete */
PTJ |= 0x01;
PTJ |= 0x01;
PTJ |= 0x01;
PTJ |= 0x01;
PTJ |= 0x01;
PTJ |= 0x01;
PTJ |= 0x01;
}
}
Stepper Motor Control (1 of 7)
• It is digital in nature and provides high degree of control.
• In its simplest form, a stepper motor has a permanent
magnet rotor and a stator consisting of two coils. The
rotor aligns with the stator coil that is energized.
• By changing the coil that is energized, the rotor is turned.
• Figure 7.45a to 7.45d illustrate how the rotor rotates
clockwise in full step.
• By changing the energizing order as shown in Figure
7.46, the stepper will rotate counterclockwise in full step.
Stepper Motor Control (2 of 7)
N
C4
current
flow
C4
S
1st
1st
S
N
N
S
N
S
N
C1
C2
C2
2nd
Figure 7.45a Stepper motor full step 1
C1
N
current
flow
C3
2nd
S
C3
S
Figure 7.45b Stepper motor full step 2
Stepper Motor Control (3 of 7)
S
C4
current
flow
C4
N
1st
1st
S
N
S
N
S
S
N
N
C1
C2
C1
C2
S
current
flow
C3
2nd
2nd
Figure 7.45c Stepper motor full step 3
C3
N
Figure 7.44d Stepper motor full step 4
Stepper Motor Control (4 of 7)
N
S
C4 rotor
C4 rotor
N
C2
S
C1
N S
C2
N
S
N S
C1
N
Step 1
C3
C3
S
S
N
Step 2
C4 rotor
C4 rotor
S
N
S
C2
N
C1
C3
N
N
S
N
C1
C2
S
Step 3
S
C3
Step 4
Figure 7.46 Full-step counterclockwise operation of step motor
Stepper Motor Control (5 of 7)
• In a four-pole stepper motor shown in Figure 7.45 & 7.46, a full step
is 90 degrees.
• The stepper motor may also operate with half step. A half step
occurs when the rotor (in a four-pole step) is moved to eight discrete
positions (45º).
• To operate the stepper motor in half steps, sometimes both coils
may have to be on at the same time. When two coils in close
proximity are energized, there is a resultant magnetic field whose
center will depend on the relative strengths of the two magnetic
fields.
• Figure 7.47 illustrates the half-stepping sequence.
• The step sizes of the stepper motors may vary from approximately
0.72º to 90º. The most common step sizes are 1.8º, 7.5º, and 15º.
• The actual stator of a real motor has more segments than previously
indicated. One example is shown in Figure 7.48.
S
C3
N
C4
C3
S
C1
rotor
C1
C4 rotor
S
S
C2
Step 8
C2
N
Step 6
C2
N
Step 4
N
N S
S
N
C1
rotor
Step 2
S
N
N
S
S
S
N
S
N
S
S
N
S
N
S
N
C4
C3
C4
C4
C3
C3
N
C4
C3
S
S
N
N
C1
N
rotor
N
rotor
S
rotor
S
rotor
C1
C1
C1
Figure 7.47 Half-step operation of the stepper motor
Step 7
C2
N
S
N
S
N
S
N
C3
S
C4
C3
C2
S
S
S
N
N
S
C1
N
N
N
N
Step 5
C2
Step 3
S
N
C2
Step 1
C2
N
S
N
S
S
N
N
C4 rotor
S
S
Stepper Motor Control (6 of 7)
Stepper Motor
Control
(7 of 7)
C1
C2
C8
S
rotor
N
S
S
C3
S
N
C7
N
N
S
N
C4
C6
C5
Figure 7.48 Actual internal construction of step motor
Stepper Motor Drivers (1 of 6)
•
•
•
•
•
•
•
•
Driving a step motor involves applying a series of voltages to the coils of the
motor.
A subset of coils is energized at a time to cause the motor to rotate one
step. The pattern of coils energized must be followed exactly for the motor
to work correctly.
A microcontroller can easily time the duration that the coil is energized, and
control the speed of the stepper motor in a precise manner.
The circuit in Figure 7.49 shows how the transistors are used to switch the
current to each of the four coils of the stepper motor.
The diodes in Figure 7.49 are called fly back diodes and are used to
protect the transistors from reverse bias.
The transistor loads are the windings in the stepper motor. The windings are
inductors, storing energy in a magnetic field.
When the current is cut off, the inductor dispenses its stored energy in the
form of an electric current.
This current attempts to flow through the transistor, reversely biasing its
collector-emitter pair. The diodes are placed to prevent this current from
going through the transistors.
Stepper Motor Drivers (2 of 6)
VCC
R
R
Q4
VCC
PP3
R
PP2
PP1
PP0
R
Q3
VCC
R
R
Step Motor
VCC
Q2
VCC
R
R
VCC
Q1
Figure 7.49 Driving a step motor
Stepper Motor Drivers (3 of 6)
• The normal full-step sequence shown in Table 7.17
should be used for high-torque applications.
• For lower-torque applications the half-step mode is used
and its sequence is shown in Table 7.18.
• The microcontroller outputs the voltage pattern in the
sequence shown in Table 7.17 or 7.18.
• Table 7.17 & 7.18 are circular. The values may be output
in the order as shown in the table, which will rotate the
motor clockwise; or in the reverse order, which will rotate
the motor counterclockwise.
• A delay of about 5 to 15 ms is required between two
steps to prevent motor from missing steps.
Stepper Motor Drivers (4 of 6)
Table 7.17 Full-step sequence for clockwise rotation
Step
Q1
PP0
Q2
PP1
Q3
PP2
Q4
PP3
value
1
2
3
4
1
on
on
off
off
on
off
off
on
on
off
on
off
off
on
on
off
on
on
off
off
1010
1001
0101
0110
1010
Table 7.18 Half-step sequence for clockwise rotation
Step
1
2
3
4
5
6
7
8
1
Q1
PP0
on
on
on
off
off
off
off
off
on
Q2
PP1
off
off
off
off
on
on
on
off
off
Q3
PP2
on
off
off
off
off
off
on
on
on
Q4
PP3
off
off
on
on
on
off
off
off
off
value
1010
1000
1001
0001
0101
0100
0110
0010
1010
Stepper Motor Drivers (5 of 6)
•
•
Example 7.11 Assuming that pins PP3...PP0 are used to drive the four
transistor in Figure 7.30, write a subroutine to rotate the stepper motor
clockwise one cycle using the half-step sequence.
Solution:
#include
step1
step2
step3
step4
step5
step6
step7
step8
half_step
"c:\miniide\hcs12.inc"
equ
$0A
equ
$08
equ
$09
equ
$01
equ
$05
equ
$04
equ
$06
equ
$02
movb
#$FF,DDRP
movb
#step1,PTP
bsr
delay10ms
movb
#step2,PTP
bsr
delay10ms
movb
#step3,PTP
bsr
delay10ms
movb
#step4,PTP
; configure PTP for output
Stepper Motor Drivers (6 of 6)
movb #step5,PTP
bsr
delay10ms
movb #step6,PTP
bsr
delay10ms
movb #step7,PTP
bsr
delay10ms
movb #step8,PTP
bsr
delay10ms
movb #step1,PTP
bsr
delay10ms
rts
; the following subroutine waits for 10 ms
delay10ms movb #$90,TSCR1
movb #$06,TSCR2
bset
TIOS,IOS0
ldd
TCNT
addd
#3750
std
TC0
wait_lp2
brclr
TFLG1,$01,wait_lp2
rts
end
; enable TCNT & fast flags clear
; configure prescale factor to 64
; enable OC0
; start an output compare operation
; with 10 ms time delay10ms
Key Wakeups
• Many embedded products are powered by battery. To lengthen the
battery life, most microcontrollers have incorporated power-saving
modes such as the WAIT, STOP modes.
• All HCS12 members have incorporated the key wakeup feature
which would wake up the CPU when keys connected to certain input
ports are pressed.
• After entering the wait or stop mode, the MCU will be interrupted
when one of these pins is pressed.
• The port H, J, and P of the HCS12 have implemented the keywakeup function.
• The user selects the active edge for wakeup by programming the
port device enable register and the port polarity select register.
• The port interrupt enable register and the interrupt flag register
together allow the user to wake up the MCU.
Key Wakeup Initialization
•
Step 1
– Set the direction of the key wakeup bits to input by writing zeros to the data
direction register.
•
Step 2
– Select the rising edge or the falling edge of the wake up pin to interrupt the MCU
by programming the related registers.
•
Step 4
– Write the service routine for the key wakeup interrupt and initialize the key
wakeup interrupt vector.
•
Step 5
– Clear any flags that have been set in the key wakeup flag register.
•
Step 6
– Enable the key wakeup function by setting the appropriate bits in the wakeup
interrupt enable register.
•
Step 7
– Clear the global interrupt mask (the I bit of the CCR register).
Considerations of the
Key Wakeup Application
•
Many applications are designed to be a wait loop that waits for the user to request for
service.
–
•
•
•
•
•
•
•
When a request is entered, the application calls an appropriate routine to provide the service.
After the service is done, the routine returns to the wait loop.
After the completion of a service to a user request, the application software starts a
timer.
If the user enters another command before the timer times out, the application
software resets the timer and responds to the user request.
If the timer times out before the user makes another service request, the application
software puts the microcontroller in low power mode to save power.
Whenever the user presses a key, an interrupt is generated to wake up the
microcontroller.
The service routine for the key interrupt simply clears the key wakeup flag and
returns to the wait loop.
Since we can choose either the rising or the falling edge to interrupt the CPU, the
choice is based on whether there is pull-down or pull-up device inside the chip.
If the MCU has internal pull down device, then choose the rising edge as the active
edge. Otherwise, choose the falling edge as the active edge.
Start
Perform reset initialization
Perform key wakeup initialization
Enable key wakeup interrupt
Start a timer
yes
User service request?
Service the request
no
no
Timer times out?
yes
Enter low power mode
(execute STOP or WAI instruction)
Key wakeup interrupt?
no
Stay in low power mode
yes after servicing the interrupt
implemented in
hardware
Figure 7.51 Logic flow of embedded applications that incorporate key wakeup feature
• Example 7.13 Write an instruction sequence to configure
Port P upper four pins for wakeup feature. Program the
Port P so that pins PP7...PP4 generate interrupt
whenever there is a falling edge applied to any one of
these four pins.
• Solution:
#include “c:\miniide\hcs12.inc”
…
bclr DDRP,$F0
bset PERP,$F0
bclr PPSP,$F0
movb #$FF,PIFP
bset PIEP,$F0
cli
; configure PP<7:4> pins for input
; enable PP7~PP4 pins’ pull device
; choose pull-up device
; clear the Port P key wakeup flags
; enable Port P interrupt
; enable key wakeup interrupt globally