Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Classical mechanics wikipedia , lookup
Jerk (physics) wikipedia , lookup
Lagrangian mechanics wikipedia , lookup
Routhian mechanics wikipedia , lookup
Center of mass wikipedia , lookup
Fictitious force wikipedia , lookup
Virtual work wikipedia , lookup
Modified Newtonian dynamics wikipedia , lookup
Computational electromagnetics wikipedia , lookup
Mass versus weight wikipedia , lookup
Centrifugal force wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Centripetal force wikipedia , lookup
Electromagnetism wikipedia , lookup
N-body problem wikipedia , lookup
Hooke's law wikipedia , lookup
Equations of motion wikipedia , lookup
Classical central-force problem wikipedia , lookup
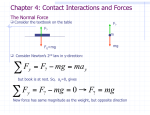
Equilibrium of Concurrent, Coplanar Force Systems EF 202 - Week 5 1 Equilibrium • Newton’s First Law - If, and only if, an object’s “mass center” has zero acceleration, then the sum of ALL of the forces acting on the object (body) is zero. • Where is a body’s mass center? We’ll study that in Module 4. But in this class, the entire body is at rest, so we know that the mass center, wherever it is, has zero acceleration. 2 Problem Solving Strategy 1. Identify ALL forces acting on the body by making a “free-body diagram” (FBD). 2. Invoke Newton’s First Law. (Add all the force vectors on the FBD and set the result equal to zero.) 3. Solve. 3 Free-Body Diagram 1. Define the “body.” 2. “Free” the body from the rest of the world by cutting through EVERYTHING that connects the body to anything else. 3. Sketch the freed body. 4. To the sketch, add EVERY force that is (or may be) acting on the body. 4 Concurrent, Coplanar Force System • Coplanar system • • The lines of action of all forces lie in a common plane. Concurrent system • The lines of action of all forces intersect at a common point. 5 Independent Equations • In a given problem, we can find only as many unknowns as we have independent equations. • For a system of coplanar, concurrent forces, Newton’s First Law yields only two independent equations for a given FBD. 6 Problem 3-4 Find magnitude and direction of F. 1. Make FBD. 2. Newton’s First Law 3. Solve. 1. Figure is already an FBD. 2. F 0 7.5 kNsin 30 ˆi cos 30 ˆj 2.25 kNcos60 ˆi sin 60 ˆj 0 F cos ˆi sin ˆj 4.5 kNˆi 7 3. Collect and equate components. For the ˆi components: F cos 4.5 kN 7.5 kN sin 30 2.25 kN cos60 0 (1) For the ˆj components: F sin 7.5 kN cos 30 2.25 kNsin 60 0 (2) Now, what? COUNT EQUATIONS AND UNKNOWNS!!!!!!! Two equations, (1) and (2), and two unknowns, F and . 8 From (1) and (2), F cos 7.125 kN (3) F sin 8.444 kN (4) Now, what? For the angle, divide (4) by (3) to get tan 1.185 49.8 For the magnitude, F F F 2 x 2 y F cos F sin 2 F 11.0 kN 9 2 Ideal Cable • • Neglect weight (massless). Neglect bending stiffness. • • • Force parallel to cable. Force only tensile. Neglect stretching (inextensible). 10 Problem 3-8 Find the forces in cables AB and AC. 1. Make FBD. 2. Newton’s First Law 3. Solve. 12 kg 11 COUNT EQUATIONS AND UNKNOWNS!!!!!!! 12 13 14 Problem 3-40 Find the forces in all five cables. Since there are 5 unknowns, we’ll need at least 3 FBD’s. 30kg 15 16 17 Linear Spring - I • Like an ideal cable, but extensible and resists either stretching or shortening. • • Force is either tensile or compressive. • When the force is not zero, it is proportional to the spring’s deformation (stretch or contraction). When the force is zero, the spring is undeformed and its length is called its free length or natural length. 18 Linear Spring - II • The constant of proportionality between the force in a spring and its deformation is called the spring’s stiffness or its spring rate. • Stiffness is usually represented by the letter k. 19 Equation for Spring Tension Compression OR F k l0 l F k l l0 stretch contraction l0 natural/free/undeformed length (length when F = 0) 20 Assumed Tension F k l l0 • Directions of loads are reversed on objects to which springs are attached (Newton III). 21 Assumed Compression F k l0 l • • Direction assumed for spring load cannot be wrong! Equation used for spring load can be wrong! 22 Problem 3-14 Spring AB is stretched 3m. What is the mass of the suspended block? 23 24 25