Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Computational
Geometry
Hwangryol Ryu
Dongchul Kim
Computational Geometry
Intersection of line segment
Basic geometric objects
Point : ( x, y )
Line : {(x1,y1) , (x2,y2) }
Line segment : size of line is given
(x2,y2)
(x2,y2)
(x1,y1)
(x1,y1)
Basic geometric objects(contd)
Polygon
Convex
Non-convex
Convex : Each indegree less than 180
Intersection of line segment
Input : a pair of line segments
Output : yes – if they intersect
no – otherwise
How do we know that intersection(x,y) exits
between two lines?
(x, y)
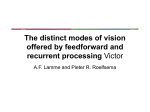
Intersection of line segment(…contd)
(x2,y2)
Algorithm
Find equation of first segment
(x1,y1)
Y=m1x+c1
Find equation of second segment
Y=m2x+c2
Find intersection of two lines : (x,y)
-
If ( x1 < x < x2 ) && ( x3 < x < x4 )
Then return (Intersection exits)
-
Else
return (No intersection exits)
(x, y)
(x3,y3)
(x4,y4)
Intersection of line segment(…contd)
Is there a pair of line
segments intersecting
each other?
Naive algorithm: Check each two
segments for intersection.
Complexity: O(n2).
Plane Sweep – Algorithm
Event is any end point or
intersection point.
Sweep the plane using a vertical
line.
Maintain two data structures:
Event priority queue – sorted by x
coordinate.
Sweep line status – Stores
segments currently intersected by
sweep line and maintain Red-Black
Tree to support data structure.
Plane Sweep – Algorithm
Problem: Given n segments in the plane, compute
all their intersections.
Assume:
No line segment is vertical.
No two segments are collinear.
No three segments intersect at a common point.
Event is any end point or intersection point.
Sweep the plane using a vertical line.
Maintain two data structures:
Event priority queue – sorted by x coordinate.
Sweep line status – Stores segments currently intersected
by sweep line, sorted by y coordinate.
Plane Sweep - Basic Idea
We are able to identify all intersections by
looking only at adjacent segments in the
sweep line status during the sweep.
Theorem: Just before an
intersection occurs, the two
relevant segments are adjacent
to each other in the sweep line
status.
Plane Sweep - Basic Idea(contd)
In practice: Look ahead: whenever two line segments
become adjacent along the sweep line, check for
their intersection to the right of the sweep line.
Plane Sweep – Algorithm
Initialization:
Add all segments’ endpoints to the event queue (O(n log n)).
Sweep line status is empty.
Algorithm proceeds by inserting and deleting discrete
events from the queue until it is empty.
Plane Sweep – Algorithm
Event A: Beginning of segment
Insert segment into sweep line
status.
Test for intersection to the right of
the sweep line with the segments
immediately above and below.
Insert point (if found) into event
queue.
Complexity: n such events,
O(log n) each O(n log n) total.
Plane Sweep – Algorithm
Event B: End of segment
Delete segment from sweep
line status.
Test for intersection to the
right of the sweep line
between the segments
immediately above and below.
Insert point (if found) into
event queue.
Complexity: n such events,
O(log n) each O(n log n)
total.
Plane Sweep – Algorithm
Event C: Intersection point
Report the point.
Swap the two line relevant
segments in the sweep line
status.
For the new upper segment –
test it against its predecessor for
an intersection. Insert point (if
found) into event queue.
Similar for new lower segment
(with successor).
Complexity: k such events,
O(logn) each O(klogn) total.
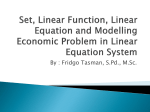
Plane Sweep – Example
a3
b4
Ex1)
s3
e1
a2
s4
a4
b3
s2
b1
s1
s0
a1
b0
b2
a0
Sweep Line
Status
s0,s1,s2,s3
Event
Queue
a4, b1, b2, b0, b3, b4
Plane Sweep – Example
a3
b4
s3
e1
a2
s4
a4
b3
s2
b1
s1
s0
a1
b0
b2
a0
Insert s4 to SLS
Action
Sweep Line
Status
Event
Queue
Test s4-s3 and s4-s2. Add e1 to EQ
s0,s1,s2, s4, s3
b1, e1, b2, b0, b3, b4
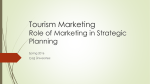
Plane Sweep – Example
a3
b4
s3
e1
a2
s4
a4
b3
s2
e2
s1
s0
a1
b0
b1
b2
a0
Action
Delete s1 from SLS
Test s0-s2. Add e2 to EQ
Sweep Line
Status
s0,s2,s4,s3
Event Queue e1, e2, b2, b0, b3, b4
Plane Sweep – Example
a3
b4
s3
e1
a2
s4
a4
b3
s2
e2
s1
b2
s0
a1
b0
b1
a0
Action
Swap s3 and s4 .
Test s3-s2.
Sweep Line
Status
s0,s2,s3,s4
Event Queue
e2, b2, b0, b3, b4
Plane Sweep –
Complexity Analysis
Total time complexity: O((n+k) logn). If kn2
this is almost like the naive algorithm.
Event queue: heap
Sweep line status: balanced binary tree
Total space complexity: O(n+k).