Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Boundary layer wikipedia , lookup
Hydraulic machinery wikipedia , lookup
Airy wave theory wikipedia , lookup
Cnoidal wave wikipedia , lookup
Flow measurement wikipedia , lookup
Euler equations (fluid dynamics) wikipedia , lookup
Lattice Boltzmann methods wikipedia , lookup
Compressible flow wikipedia , lookup
Wind-turbine aerodynamics wikipedia , lookup
Bernoulli's principle wikipedia , lookup
Flow conditioning wikipedia , lookup
Aerodynamics wikipedia , lookup
Reynolds number wikipedia , lookup
Derivation of the Navier–Stokes equations wikipedia , lookup
Navier–Stokes equations wikipedia , lookup
Lift (force) wikipedia , lookup
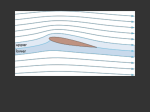
BULLETIN OF THE TRANSILVANIA UNIVERSITY OF BRAŞOV A NUMERICAL STUDY OF 2-D FLOW AROUND A FLAPPING AIRFOIL A. DUMITRACHE* A. CARABINEANU** Abstract: The paper explores two fundamental challenges of flapping flight. The first part presents a computational study of the fluid physics of a heaving airfoil to elucidate the important features of these flows and determine how the flow physics relate to important parameters such as power consumption and efficiency. The second part presents a method for creating a control model for flapping flight. Using proper orthogonal decomposition (POD), sets of orthogonal basis functions are generated for simulating flows at the various heaving and pitching parameters. The effects of these approximations on the accuracy of the model are assessed. Keywords: Flapping airfoil, Navier-Stokes equations, Proper orthogonal decomposition. 1. Introduction The oscillation of an airfoil-like appendage —"flapping" — is a common form of propulsion for many flying animals or many swimming species. The generation of thrust by an oscillating airfoil has a notable effect on the qualitative structure of the wake. Thrust production by an oscillating airfoil was first described in the early part of the 20th century. [Knoller, 1909] and [Betz, 1912] independently noted that the vertical motion of an airfoil produces an effective angle of attack so that the resulting normal force vector has a component in the forward direction. [Lai and Platzer, 1999] and [Jones et al., 1996] used a water tunnel and laser Doppler velocimetry to obtain high-resolution velocity measurements in the wake of a purely heaving airfoil. Their experimental results confirmed the calculations of [Triantafyllou et at., 1993], which identified the Strouhal number, St fA U as an important parameter for thrust generation. Here, f is the oscillation frequency, U the free stream velocity, and A is twice the amplitude of motion measured from the mean position. [Lai and Platzer, 1999] noted that the structure of the wake (drag or thrust) can be classified according to the Strouhal number, with those motions below a threshold of St 0.06 producing drag and those above producing thrust. [Jones et al., 1998] developed an inviscid model to determine the wake structure on a two-dimensional airfoil undergoing pitching, heaving, and combined motions. More recently, [Minotti, 2002] developed a model of a flapping flat plate from two-dimensional potential theory that included a stationary vortex near the leading edge to maintain a regular velocity at the singularity at the leading edge. None of these studies fully address the importance of viscous effects. Of course, as the length scales of flapping flight shrink, viscosity will play a greater role in the fluid * Institute of Mathematical Statistics and Applied Mathematics “Gheorghe Mihoc-Caius Iacob”. ** University of Bucharest, Department of Mathematics A numerical study of 2-d flow around a flapping airfoil 126 mechanics. 2. Problem definition It is considered a rigid, two-dimensional airfoil undergoing prescribed, periodic, flapping motions at zero angle of attack in an incompressible, viscous flow with constant horizontal (chord-wise) free stream velocity, U . The flapping consists of heaving (vertical), lagging (horizontal), and pitching (angular) motions and the airfoil is in cruise conditions: level flight with constant average velocity, U . Fig. 2.1 Newtonian and airfoil coordinate systems For computational simplicity, the problem is formulated in a non-inertial reference frame fixed to the airfoil such that the origin coincides with the pitch-axis, the x-axis is fixed parallel to the chord, and the y-axis is perpendicular to both the x-axis and the span (see Figure 2.1). In the inertial frame, the X-axis is horizontal (mean flow direction) and the Y-axis is vertical. The dimensional horizontal, vertical, and angular positions of the airfoil are denoted by X 0 , Y0 , and , respectively, where the first two are made nondimensional by dividing the absolute position, X 0 , Y0 , by the chord length, c. 2.1. Kinematics Introducing the reduced frequency, k 2 f c / U , the position of the airfoil for sinusoidal motions is given as Y0 h sin k, X 0 l sin k , max sin k , (2.1) where h Ymax c is the dimensionless heave amplitude, l X max c is the dimensionless lag amplitude, and U t c is the dimensionless time, and are dimensionless phase parameters for lagging and pitching, respectively. By differentiating Equation 2.1, the dimensionless heave velocity can be expressed as V0 Y0 kh cos k . Note that the maxi-mum heave velocity is given by the quantity kh= 2fYmax / U , which differs from the definition of St by a factor of . Being more intuitive, the quantity kh is preferred for categorizing the results, although conversion to St will be made when appropriate Bulletin of Transilvania University of Brasov Vol 13(48) - 2006 127 2.2 . Governing Equations In the non-inertial frame, the non-dimensional Navier-Stokes equations are written: u 1 2 p u u u a xyz t t Re (2.2) where a xyz is the acceleration of the non-inertial reference frame (including linear, centripetal, rotational and Coriolis terms). Taking the curl of Equation 2.2 and defining the vorticity in two-dimensions as u kˆ (where k̂ is the unit vector perpendicular to the plane of flow), results in the vorticity transport equation: 1 2 u 2 t Re (2.3) Note that the only source of vorticity from non-inertial effects is from the angular acceleration of non-inertial reference frame, denoted by . This observation is used to simplify matters by defining vorticity to be the sum of a background vorticity, Z, and a disturbance term, ' : Z ' where: Z 2 (2.4) Substituting these into Equation 2.3 results in: ' 1 2 u ' ' t Re (2.5) where a simplification is made from the fact that the gradient and Laplacian of the spatially-constant quantity Z are zero. Assuming incompressibility, Equation 2.2 is supplemented by the continuity equation u 0 and after defining the stream function, , by u kˆ (2.6) it can be related to through the continuity equation 2 (2.7) As with vorticity, the stream function and velocity components are decomposed into combinations of background and disturbance terms. The most convenient choice is to use the free stream velocity, U , as the background value, so that u U u' (2.8) A numerical study of 2-d flow around a flapping airfoil 128 and ' such that U kˆ ; u ' ' kˆ (2.9) For a constant free stream velocity, U , the equation for is given by 1 U U 0 x sin y cos V V0 y sin x cos x 2 y 2 2 (2.10) plus an arbitrary constant taken to be zero. Note that 2 2 Z and the stream function equation can be reduced to 2' 2 2 Z ' (2.11) That is, the problem has been reduced to two analytical expressions for the background values (Equations 2.4 and 2.10) and two partial differential equations: a vorticity transport equation for ' (Equation 2.5) and a Poisson equation for ' (Equation 2.11). The interaction between these two sets of equations is in the advection term for ' , which requires the combined background and disturbance velocity (Equation 2.8). 2.3 Boundary Conditions The airfoil is a no-slip surface so that the total vorticity at the airfoil, a can be related to the total stream function by a 2 n 2 airfoil (2.12) where refers to the normal derivative. Thus, n 'a 2 ' 2 Z 2 n airfoil n 2 airfoil (2.13) For the infinite-space problem, the appropriate boundary conditions at infinity are that the velocity equals the free stream velocity and the fluid is irrotational in the inertial frame. Thus, ' 0, ' kˆ 0. (2.14) 3 Numerical Implementation 3.1 Discretization of the Navier-Stokes Equations The governing equations are discretized using finite differences on a conformal map. A rectangular , domain is first mapped to a circular domain using a log-polar transformation, and the circular domain is mapped to an airfoil by means of a Joukowski transformation. Bulletin of Transilvania University of Brasov Vol 13(48) - 2006 129 Before discretization, the governing equations are transformed from physical x, y space to computational , space. The vorticity transport equation becomes ' 1 2 h1 h2 , , ' , ' , (3.1) t Re where the subscript , refers to derivatives in the , domain, h1 and h1 are the grid transformation metrics which relate the size of a grid cell in the x, y domain to the , domain. Additionally, the Poisson equation for ' becomes 2 , ' h1h2 '. (3.2) Stepping in time is performed using a second-order Runge-Kutta scheme (see [Schneider and Zedan, 1981]). 3.2 Boundary Conditions Boundary conditions are required for ' (Equation 2.3) and ' (Equation 2.11). At the airfoil. Equation 2.13 is discretized using a second order difference equation: 'a 2 8 1 7 0 2n 2 Z At the inlet, the flow is assumed to be irrotational and so ' 0 . At the outlet, viscous effects are neglected so that the material derivative of the vorticity vanishes. For the stream function, ' on the airfoil. At the outer boundary, the normal derivative of ' is prescribed, which amounts to specifying the tangential velocity. At the inlet, disturbances to the free stream flow are neglected so that ' 0 n inlet (3.3) If viscosity is again neglected, then the material derivative of velocity is affected only by the pressure gradient. Thus, at the outlet D ' 0, Dt n outlet (3.4) which has a similar form to the boundary condition for vorticity. 3.3 Forces and Power The total force on the airfoil is a combination of pressure and viscous forces. A simplified procedure for calculating the pressure on the airfoil is based on the relationship p 1 a ds (3.5) s Re n which relates the pressure gradient along a no-slip wall to the normal derivative of vorticity, modified for the d'Alembert forces. The viscous force is found from the shear stress on the airfoil, s which is related to the A numerical study of 2-d flow around a flapping airfoil 130 tangential velocity, u s by n 1 u e 1 a Re n Re (3.6) Once the pressure and viscous forces are known at each point, they are integrated numerically to find the force and moment on the airfoil, which can be easily resolved into the force components, FX and FY, and moment, M, in the inertial reference frame. For the calculation of average forces, it is convenient to have a whole number of steps in each flap, which has the duration 2 / k . The time step, is then 2 /( nk ) , where n is the number of steps per flap. The instantaneous power can be calculated from the total force by multiplying the force components by the appropriate velocity components in the inertial frame. The input power coefficient, Pi is the combination of the power needed to heave, lag, and pitch the airfoil: (3.7) Pi FY V0 FX U 0 M Note that the power input is negative by this definition. The output power coefficient, Po , from thrust is Po FXU (3.8) so that the output power is positive when thrust is produced and negative for drag. Integrating the instantaneous power yields the total work required (input) to flap the airfoil, Wi , and the work done in propelling it (output), W0. Dividing the work by the time over which the power is integrated (which can range from one stroke to several flaps), yields the average power. Following [Jones and Platzer, 1997] and [Wang, 2000], the thrust efficiency, , is defined as the ratio of total work out to total work in: Wo Wi . 3.4 Validation of the Code The performance of the model was assessed through several test simulations. Preliminarily, flow around a stationary circular cylinder was simulated at Re 100 using a 128 384 grid. The simulated St was 0.164 and the force coefficients on the cylinder were found to be CD, avg 1.31 , (average drag coefficient), CL, rms 0.226 (rms lift coefficient) and C L ,max 0.319 (maximum lift coefficient) To assess the dynamics of the vortex wake, the simulated flow behind an impulsively started cylinder was compared to the experimental results of [Bouard and Coutanceau, 1980] Re 550 . Additionally, the computational and experimental velocities along the mean wake line were compared for the same flow conditions as above. Bulletin of Transilvania University of Brasov Vol 13(48) - 2006 131 Fig. 3.1. Computed vorticity at the leading edge ( LE ) and trailing edge ( TE ) for various grid resolution To ascertain the effects of grid refinement on the solution, a heaving airfoil was simulated with kh 4.0 , h 0.25 , and Re 1000 using a number of grids. Figure 3.1 shows the vorticity at the leading and trailing edges after one stroke for various levels of grid refinement (where the relative grid spacing of 1 corresponds to a 512 512 grid). 4 Results of the CFD Model The numerical model described in the previous section was used to simulate a heaving airfoil with frequencies ranging from 2.0 k 10.0 and maxi-mum heave velocities from 0.8 kh 1.5 0.25 St 0.48 at Re = 500. A wide variety of flow patterns are observed in the parameter space studied. The long-term solutions for flows with kh 0.8 are periodic and symmetric, meaning each up-stroke and down-stroke are mirror images. For kh 1.0 , asymmetric solutions are observed. For kh 1.2 , aperiodic, quasiperiodic, and asymmetric solutions are common. The term aperiodic is self-explanatory; by quasi-periodic it is meant that for several periods the flow changes relatively little from period to period until there is a large qualitative change lasting for a few strokes, after which the flow returns to its former, slowly evolving state. Asymmetric solutions are those where there is no symmetry in either the forces on the airfoil or the vorticity in the wake in the direction of heaving, as when the wake is deflected from the mean heave position. 4.1 Flow Patterns During the first half of the stroke, vortex filaments form at both the leading and trailing edges. At the leading edge, the vortex filament begins to roll up into a vortex at midstroke. As the airfoil motion reverses, the vortex filament weakens and a significant secondary vortex extends from the airfoil, cutting off the filament feeding the leading edge vortex (LEV). The LEV then advects downstream. As the heaving frequency increase, the time scale of the heaving motion approaches the hydrodynamic time scale flow. As the frequency increases further, the LEV remains near the leading edge for a larger portion of the subsequent stroke where its strength is reduced substantially by interaction with the airfoil. The asymmetry in the flow leads to an asymmetry in the power coefficients, as well. A numerical study of 2-d flow around a flapping airfoil 132 At high frequency, the flow are highly aperiodic with large wake deflections. Analysis of the flow shows that the high frequency of oscillation allows successive trailing edge vortices to have significant interaction with one another. 4.2 Power and Efficiency Because many of the simulations produce aperiodic solutions, averages are taken over many flaps (starting after several flaps are made to allow for the suppression of the initial transients). The overall efficiency is very low: max 11% at k 5.333 and kh 1.2 . In comparison, [Wang, 2000] found the maximum efficiency for a thin ellipse to be 10% at similar values of frequency and amplitude. Figure 4.1 shows the horizontal (output) power components for two different simulations with kh 1.0 , k 2.0 (low efficiency) and k 5.333 (high efficiency). The horizontal axes are scaled by the appropriate k so that the strokes from each simulation coincide. For the k 5.333 case, the output power rises and falls smoothly and is roughly correlated with the velocity of the airfoil; peak power occurs when the airfoil is near the mid-stroke and is lowest when the airfoil is near the extremes. For the k 2.0 case, the output power initially rises at the start of each stroke but before the airfoil reaches mid-stroke, the power temporarily levels off, after which it remains substantially below the k 5.333 case. Interaction between the airfoil and the shed vortices induces a drag on the airfoil, which has a stronger effect at higher frequencies due to the greater proximity of the vortices. There is a strong correlation between heaving efficiency and the separation between the heaving frequency for a given profile and the frequency resulting in the maximum spatial amplification of this profile. As the heaving frequency increases, the driving frequency becomes greater than the frequency of the most unstable mode. Fig. 4.1. Output power for k = 2 and k = 5.333 over one heaving cycle. 5 Analysis of the CFD Model Over the parameter ranges covered in this numerical study, several distinct solution topologies are observed, including aperiodic and asymmetric solutions. In their comprehensive experimental investigation of flow around an oscillating cylinder, [Williamson and Roshko (1988)] identified a number of different flow regimes similar to those observed in this work, including deflected wakes as well as various numbers of vortices shed into the wake per oscillation, symmetrically or asymmetrically. Bulletin of Transilvania University of Brasov Vol 13(48) - 2006 133 Additionally, for a large portion of their parameter space, they found no stable pattern. Whereas [Williamson and Roshko, 1988] found sharp changes between the various flow regimes in their study of a circular cylinder, the results here demonstrate that for a heaving airfoil the transition regions are often characterized by aperiodic flows that "switch" between the neighboring flow regimes. Additionally, at high kh and high k, all of the simulations produced aperiodic results. The fate of the LEV can also be correlated to the heaving efficiency. While the overall efficiency was low, large increases in efficiency occur at the transition from a shed LEV to one that is dissipated. The results are also in accordance with [Gustafson, 1996] in that some of the vorticity contained in the LEV is subsequently recaptured by the airfoil. In agreement with [Anderson et al., 1998], high thrust coefficients and propulsion efficiencies corres-pond to the positive reinforcement of the trailing edge vortex (TEV) by the LEV. Additionally, thrust and efficiency are greatly reduced when there is negative reinforcement between the LEV and TEV. [Tuncer and Platzer, 1996] noted a large increase in efficiency is possible when a stationary airfoil is placed in the wake of a heaving airfoil. As the heave frequency is increased, the wavelength of the wake vortices is shortened and shed vortices remain nearer to the trailing edge for a greater portion of each flap, and the increased interaction leads to lower efficiency [Jones and Platzer, 1997]. While the current study focuses on heaving motions, it is expected that analogous relationships will hold for motions with pitching and lagging. With pitching, the behavior and evolution of the LEV can be controlled more effectively. Absent that in twodimensions, the pitching of the wing will assist in the streamlining of the motion and control of the LEV. 6 A Reduced-Order Model In the realm of flapping flight, recent experimental studies by [Srygley and Thomas, 2002] and [Fry et al., 2003] have shown that the forces generated by flapping insects are very sensitive to the wing kinematics. Since active control requires a solver that can run at the time-scale of the fluid motion, Navier-Stokes (N-S) solvers are not suited for active control of fluids. Alternatively, reduced-order models can be used to greatly simplify a fluid problem and drastically cut the computational resources needed to solve it. Reduced-order models, however, result in the loss of some information about the flow, thus adding another level of approximation to the problem. The focus of this second part is the development of a reduced-order model that can potentially be used in the active control of a flapping wing. One method that has shown promise uses proper orthogonal decomposition (POD, described in the next section) to generate a set of orthogonal modes from a given flow (either experimental of simulated). These modes can then be used in a Galerkin projection of the N-S equations. The POD basis functions are optimal in the sense that subsequent modes contain the maximum amount of remaining energy from the data set. In this way, it is possible to represent a complex flow using only a few basis functions, as opposed to the thousands of mesh points needed to determine a flow using traditional computational techniques. The result is to convert the non-linear partial differential N-S equations to a (comparatively small) set of coupled, non-linear, ordinary differential equations (ODE's). A typical CFD simulation of a flapping airfoil presented in this paper requires on the order of 30,000 degrees of freedom. The same simulation can be closely approximated by as few as ten to twenty ODE's. Recently, several authors have attempted to demonstrate the usefulness of POD for A numerical study of 2-d flow around a flapping airfoil 134 generating control models. 7 Derivation of the Reduced-Order Model 7.1 Proper Orthogonal Decomposition Proper orthogonal decomposition [POD], also known as Karhunen-Loeve expansion, was introduced in the context of turbulence by Lumley, where it was used to identify and examine the stability of coherent structures in turbulent flows (see [Holmes et al., 1996] for a review). With POD, a set of modes is produced from a series of flow snapshots generated by either computational or (less often) experimental means. Either the vorticity field, or the velocity field, u, can be used for the POD. When velocity is used, the eigenvalues of the decomposition are a direct measure of the kinetic energy contained in each mode and the POD basis functions are optimal in the sense that they capture the most kinetic energy possible for a given number of modes. The velocity formulation proved superior to the vorticity formulation for the current work, and only the former derivation is provided here. Let u k x represent a snapshot of the velocity field over domain D at time k and ui , u j be a suitable defined inner product. Following [Ravindran, 2000], a function is sought that gives the best representation of the ensemble of N snapshots k L u : 1 i N in that it maximizes L2 1 N ui , N , i 1 2 (7.1) . In other words, one seeks a function that has the largest mean square projection of the set L . To cast the problem into an equivalent eigenvalue, define 1 N K so that D u i x u i x'x' dx' N (7.2) i 1 K, N 1 N 2 ui , . Also define i 1 K, , 1 N N 2 ui , i 1 , . Let * be a function that maximizes . Writing variations of * as * ' , can be written as F dF d 0 and so K * , * K * , ' K ' , * 2 K ' , ' * , * * , ' ' , * 2 ' , ' K * , ' * , ' . The maximum occurs where . Since ' is an arbitrary variation, the maximization problem in Equation 7.1 is the same as solving the eigenvalue problem (7.3) K* * Assuming has the form (i.e., the modes are linear combinations of the snapshots) N w j u j , and using Equation 7.2, Equation 7.3 can be written CW W , where j 1 Cij D u i u j dxdy and W is the matrix of eigenvectors. By construction, C is non- negative Hermitian and the eigenvectors in W are orthogonal. Bulletin of Transilvania University of Brasov Vol 13(48) - 2006 135 For each eigenvalue of C, j , there is a corres-ponding mode, j . Using J modes, ordered by j , the snapshots can be approximated by u k x uˆ k x J y j k t j (7.4) j 1 where û is the approximate velocity profile and the coefficients, y j , are given by y j kt 1 uk , j j (7.5) Equation 7.5 will be referred to as a projection of a solution, since it is the result of projecting a snapshot u k onto the POD modes, j . It is convenient to normalize the modes such that i , i 1 , making the modes orthonormal. 7.2 Galerkin Projection The POD modes can be used to simulate a fluid flow by reformulating the N-S equations using a Galerkin projection, in the non-inertial reference frame of the airfoil. Given the appropriately modified Navier-Stokes equations, u 1 2 p u u u a 0 t kˆ r 2 r 2kˆ u , t Re (7.6) the time dependent velocity field, u x, t , is expanded as u x, t M m t u m x m 1 J y t x j j j 1 (7.7) where J is the number of POD modes and M is the number of control functions needed to simulate the desired motion (e.g., heaving, pitching, or lagging; described below). Note that m t are prescribed control inputs, while y j t are the dependent variables of the simulation. When control functions are used, the snapshots must be modified by subtracting the control functions before the decomposition is performed: M k umodified uk m kt um . m 1 Using [ ] to represent a boundary integral and noting that i , 2 u i , u i u , Equation 7.7 is projected onto the orthogonal modes, i , to get: u 1 1 i ,u u i , u i u i , a 0 i , ˆ r t Re Re (7.8) 2 i , r 2 i , i , ˆ u . The pressure term does not add any terms to Equation 7.8. Because the modes are linear combinations of the divergence free snapshots, each mode is itself divergence free. Therefore, one can write i , p p i , 1 p i 0 . The last step follows from the fact that the velocity on the airfoil is zero in the noninertial reference frame, and the pressure at the outer boundary is considered negligible. By orthogonality, the left hand side of Equation 7.8 reduces to: i , i , u t m y ~ i , um i i , t m 1 t M A numerical study of 2-d flow around a flapping airfoil 136 ~ where i , is retained to maintain the generality of the following derivation, even though ~ in practice the modes are normalized and i 1 . For the flapping airfoil, the prescribed control inputs are heaving, lagging, and angular (pitching) velocity. Thus, to use the control notation of Equation 7.7: h V y ; l V x ; p . After much algebra, the N-S equations are reduced to the following set of ODE’s: M J J 1 J 1 M m eim M J ~ y i i m a im y j bij y i y k cijk p2 dˆ ip m y j f ijm t m 1 t Re j 1 Re j 1 k 1 m 1 m 1 j 1 (7.9) M M M J m n g imn p y j hi j m hˆim m 1 n 1 m 1 j 1 where aim i , um ; bij i ,u j i u j cijk i , u j u k ; d ii i , iˆ d ih i , ˆj ; d ip i , kˆ r (7.10) dˆip i , r ; eim i ,um i um f ijm i , u j u m i ,u m u j g imn i ,um un hi j 2 i , kˆ u j ; hˆim 2 i , kˆ u m where the superscripts m and n refer to any of the motions being controlled. Equations 7.9 and 7.10 constitute an initial value problem with coupled, non-linear ODE's with constant coefficients a im , bij , etc. Solving these equations with a suitable time-stepping algorithm will be referred to as a Galerkin simulation. The velocity field produced by solving these equations will be denoted by u~x, t . 7.3 Definition of Errors Following [Graham et al., 1999], errors are classified into two categories, projection errors and simulation errors. Projection errors result from the inability to exactly recreate a snapshot using the POD modes of a given simulation. For this work, the projection error is defined as: p u uˆ, u uˆ u m 1 mum , u m 1 mu m M M (7.11) where M is the number of control functions (depending on the motions - heaving, pitching, or lagging - to be controlled). Simulation errors result from errors in yi , generated in the Galerkin simulation. They include discretization errors, numerical (round-off) errors, and most importantly, errors resulting from the loss of information about the flow during the POD. The simulation error is defined as the difference between the total error and the projection error, Bulletin of Transilvania University of Brasov Vol 13(48) - 2006 s t p , where the total error is given by u u~, u u~ t M M u mum , u mum m 1 m 1 137 (7.12) Ultimately, the measure of the success of the model will be its ability to reproduce the forces and moment on the airfoil. 7.4 Control Modes To be able to change the flapping parameters in this formulation, it is necessary to include a control function in the POD and subsequent Galerkin simulation. While the restrictions on the control function are fairly loose, the actual control function chosen can have a marked effect on the accuracy of the method. The control function is required to be divergence free and need only satisfy the appropriate boundary conditions; otherwise, it is arbitrary. Several methods were used to generate candidate control functions. The simplest was to impulsively start an airfoil with the desired motion in a quiescent fluid and use an arbitrary snapshot from the generated flow field. Additional control functions were generated by oscillating an airfoil and subtracting off either the mean flow or the flow around a stationary airfoil. The excellent agreement among the mode coefficients leads to very small simulation errors. While the errors using the control function from the impulsively started airfoil are also low, using a heaving airfoil less the stationary flow substantially reduces the errors. Note that the control function was generated from a simulation with heaving parameters identical to the test case. 8 Results of the POD/Galerkin Simulations The POD/Galerkin model described above is used to simulate a flapping airfoil at a variety of parameters. For each of the cases presented in this section, the POD modes were created by decomposing snapshots from one or more CFD simulations. The first demonstration of the reduced-order approach will focus on heaving only. As presented before, for certain heaving parameters the flow can be asymmetric or aperiodic. The aperiodic solutions cause serious problems for the POD approach, since the number of flaps (and thereby snapshots) required to include all the information in the flow grows substantially (infinitely, for chaotic solutions). Additionally, the asymmetric flows are dependent on starting conditions; while this could make for an interesting bifurcation analysis it is not the focus of this work. Therefore, only the symmetric, periodic heaving-only simulations will be discussed here; chaotic flows can be "stabilized" by including a pitching component. Among other factors, the accuracy of a Galerkin simulation is dependent on both the number of modes retained in the simulation and the number of snapshots used to generate these modes. As the number of snapshots is increased, the dynamic of finer flow details can be captured and the projection error is reduced. To investigate the effect of the number of snapshots on the error components, several additional test simulation are made using the same flapping parameters as above. As is evident, the simulation error typically increases when fewer snapshots are used in the decomposition. 138 A numerical study of 2-d flow around a flapping airfoil 8.1 Variation of the Heaving Parameters To be a useful control model, it is necessary that a Galerkin simulation be able to represent a range of flapping parameters that may differ from those used to create the POD modes. Thus, it is necessary that a set of POD modes be able to accurately reproduce the forces on the airfoil for a range of parameters in some vicinity of the parameters used to create the snapshots. For heaving motions, three non-dimensional para-meters can be used to describe the flow: k , h and Re , but the heaving control studies will be limited to k and h , the primary parameters of the heaving motion. There are a multitude of ways to construct the POD mode sets. One can simply use POD modes generated from a single CFD simulation with certain parameters and then alter t in Equation 7.9 to simulate a new set of parameters. Errors will be introduced into the Galerkin simulation because the modes do not contain all the necessary information about the new flow: i.e. they do not span the solution space for the new parameters. On the other hand, by combining snapshots from two or more CFD simulations, the information contained in the mode set can be enhanced. Thus, it is expected that, at least for the periodic and symmetric region of the parameter space, the sensitivity of the Galerkin simulation to changes in k and h is roughly constant. 8.2 Pitching As noted in Section 4, for certain sets of heaving parameters the resulting flow becomes aperiodic and the generation of a standard mode set becomes impractical. In particular, the parameters that produce the highest efficiency are either in or very near to the aperiodic regions. By allowing pitching in the airfoil motion, however, the region of periodic solutions can be extended further into the more energetic flapping regimes. Additional control functions were generated in a manner similar to the creation of the control function for heaving; an airfoil was oscillated in pitch or lag in a steady free stream, and the flow about a stationary airfoil in an identical free stream was later subtracted to produce a control mode with the desired motion. For the pitching cases presented here, the pitch-axis is at the leading edge and the pitching motion lags the heaving motion by 2 . If the simulation of an airfoil with k 5.56 , h 0.25 , max 0.2 , were for heaving only, the frequency and amplitude would place it in the aperiodic region of the parameter space. However, by adding the pitching motion, the flow is both periodic and symmetric. The errors are in range of 10%. Additionally, the efficiency of the flapping motion is nearly double that of the heaving only case; for the given parameters, 18% . There are many parameters needed to define the motion of a flapping wing. Even a twodimensional wing undergoing sinusoidal motion requires specifying the Reynolds number, frequency, the heave, lag, and pitch amplitudes, the lag and pitch phase angle, and location of the pitch axis. A comprehensive assessment of all of the parameters is not practical within the scope of this work. However, it is useful to assess the ability of the POD/Galerkin technique in simulating variations in more than one flapping parameter. To demonstrate this concept, a Galerkin simulation is performed at k 5.56 , h 0.25 , max 0.2 using POD modes Bulletin of Transilvania University of Brasov Vol 13(48) - 2006 139 generated from snapshots of CFD simulations with k 5.26 , h 0.25 , max 0.1875 , = 0.1875; and max k 5.26 , h 0.25, max 0.2125 ; k 5.88, h 0.25, k 5.88, h 0.25, max 0.2125 . Note that the CFD simulations vary in both flapping frequency and pitch amplitude and share neither of these parameters with the Galerkin simulation. Figure 8.1 shows the coefficient errors and force portrait for this simulation using 36 modes ( M 1 104 ). For the first flap, the forces track nearly as well for this simulation as for pitching only, demonstrating that the control of multiple parameters is as feasible as independent parameters. Fig. 8.1. – (a) Projection, simulation, and total errors for a Galerkin simulation with k 5.56 , h 0.25 , max 0.2 using a POD mode set created from CFD simulation; (b) Forces for the same simulation. 9 Assessment of the Reduced-Order Model The cases presented in Section 8 demonstrate that the flow around a flapping wing and the forces generated by the flapping motion can be modeled accurately using the POD/Galerkin approach described in Section 7. Variation of flapping parameters can be accommodated, but the parameter range is dependent on the method used to construct the POD mode sets. Section 8 demonstrates that mode sets created from individual CFD simulations are not useful for variations in flapping parameters. By combining snapshots from multiple CFD simulations, however, the Galerkin simulations can provide reliable results for small and moderate variations in flapping parameters. Thus, to simulate moderate changes in 140 A numerical study of 2-d flow around a flapping airfoil flapping parameters, two alternatives are possible: the first is to use many POD mode sets with narrow parameter ranges and switch among the sets as necessary; the alternative is to generate one large mode set with a wide range of parameters. The preferred method will depend on the structure of the controller. Using more snapshots requires more preprocessing and solving larger sets of equations. The preprocessing is unimportant in that it only needs to be performed once. More restrictive is increasing the size of the equation set; larger equation sets will be more computationally intensive for the controller. For example, a 25% change in frequency is achieved using 35 modes generated by combining snapshots from four CFD simulations. Therefore, there is a trade-off between the size of the mode set (and corresponding numbers of equations in the Galerkin simulation) and the useful range of that mode set. While the overall error of the Galerkin simulations is small (the difference in energy between the projected and simulated flows is often less than 10%), for some simulations, the forces deviate noticeably before the completion of one flap and become totally inaccurate after several flaps. The lack of accuracy in long-term prediction, however, is not a great impediment to the use of the POD/Galerkin approach for a control model. Indeed, if only long-term solutions (i.e., over several flaps such that the flow reaches a periodic state) are needed, much more efficient, if not as elegant, solutions are possible (most notably, a simple lookup table with flapping parameters as inputs and forces and moments as outputs). However, for active control at time-scales at or less than one flap, the long term inaccuracy is not as important, given a method for observing the flow and feeding it back into the controller; feedback loops are routinely used to account for the inability of a model to perfectly account for the physics of the controlled system. Observing the flow and generating feedback loops is no small task, however. The approach described above relies on global observability. That is, the POD modes are created from (spatially) complete know-ledge of the velocity field. In practice, information about the flow would be limited to local properties near the airfoil such as pressure, velocity, or shear, or integrated properties such as total forces on the airfoil. Thus, a feedback loop could not use global knowledge of the velocity field to recalibrate the Galerkin coefficients (e.g., by using the projection in Equation 7.5). 10 Conclusion This paper focuses on two important aspects of flap-ping flight: the physics of the flow of a fluid around a heaving airfoil and the development of a reduced-order model for the control of a flapping airfoil. A numerical study for two-dimensional flow around an airfoil undergoing prescribed oscillatory motion in a viscous flow is developed. The model is used to examine the flow characteristics and power coefficients of a symmetric airfoil heaving sinusoidally over a range of frequencies and amplitudes. Both periodic and aperiodic solutions are found. Additionally, some flows are asymmetric in that the up-stroke is not a mirror image of the down-stroke. For a given Strouhal number, the maximum efficiency occurs at an intermediate heaving amplitude. Above the opti-mum frequency, the efficiency decreases similarly to inviscid theory. The computational model is used as the basis for developing a reduced-order model for active control of flapping wing. Using POD, sets of orthogonal basis functions are generated for simulating flows at the various heaving and pitching parameters. With POD, most of the energy in the flow is concentrated in just a few basis functions. Even two-dimensional flapping requires a large number of parameters, only a few of which are Bulletin of Transilvania University of Brasov Vol 13(48) - 2006 141 examined here. The results of Section 8 demonstrate that variations of two parameters ( k and max ) can be modeled as well as variations of single parameters when the snapshots are taken from CFD simulations that vary in both parameters. Incorporating all of the parameters in two-dimensional flapping into a comprehensive set of POD modes would require a substantial amount of preprocessing, as well as large sets of modes to span all of the control space. Fixing certain parameters in the hardware would alleviate this problem to some extent. The suitability of this approach for controlling a flapping wing over a broad range of parameters is analysed. References 1. Ahmadi, A. R., Widnall, S. E.: Unsteady lifting-line theory as a singularperturbation problem. J. Fluid Mech 153, 1985, p. 59-81. 2. Anderson, J. M., Streituen, K., Barrett, K. S. and Triantafyllou, M. S. 1998 Oscillating foils of high propulsive efficiency. J. Fluid Mech. 360, pp.41-72. 3. Betz, A. 1912 Ein Beitrag zur Erklarung des Segel-fluges. Zeitschrift fur Flugtechnik und Motor- luftschiffahrt 3, pp. 269-272. 4. Bouard, R. and Coutanceau, M. 1980 The early stage of development of the wake behind an impulsively started cylinder for 40 < Re < 106. J. Fluid Mech. 101 (3), pp. 583-608. 5. Fry, S. N., Sayaman, R. and Dickinson, M. H. 2003 The aerodynamics of free-flight maneuvers in drosophila. Science 300, pp. 493-498. 6. Graham, W. R., Peraire, J. and: Tamg, K. Y. 1999 Optimal control of vortex shedding using flow-order models. Part II-model-based control. Int. J. Numer. Meth. Engng. 44, pp. 973-990. 7. Gustafson, K. 1996 Biological dynamical subsystems of hovering flight. Mathematics and Computers in Simulation 40, pp. 397-410. 8. Holmes, P., Lumley, J. L. and Berkooz, G. 1996 Turbulence, coherent structures, dynamical sys-tems and symmetry. Cambridge University Press. 9. Jones, K. D, Dohring, C. M. and Platzer, M. F. 1996 Wake structures behind plunging airfoils: A comparison of numerical and experimental results. AIAA Paper 96-0078. 34th AIAA Aerospace Sciences Meeting, Reno, NV. 10. Jones, K. D., Dohring, C. M. and: Platzer, M. F. 1998 Experimental and computational investigation of the Knoller-Betz effect. AIAA Journal 37 (7), pp. 1240-1246. 11. Knoller, R. 1909 Die Gesetze des Luftwiderstaades. Plug- und Motortechnik 3, pp. 17. 12. Lai, J. C. S. and Platzer, M. F. 1999 Jet characterris-tics of a plunging airfoil. AIAA Journal 37 (12), pp. 1529-1537. 13. Ly, H. V. and Than, H. T. 2001 Modeling and control of physical processes using proper orthogonal de-composition. Math. and Comp. Modeling 33, pp. 223-236. 14. Minotti, F. O. 2002 Unsteady two-dimensional theory of a flapping wing. Phys. Rev. E 66. 15. Ravindran, S. S. 2000 A reduced-order approach for optimal control of fluids using proper orthogonal decomposition. Int. J. Numer. Meth. Fluids 34, pp. 425-448. 16. Schneider, G. E. and Zedan, M. 1981 A modified strongly implicit procedure for the numerical solution of field problems. Num. Heat Transfer 4, pp. 1-19. A numerical study of 2-d flow around a flapping airfoil 142 17. Srygley, R. B. and Thomas, A. L. R. 2002 Unconventional liftgenerating mechanisms In free-flying butterflies. Nature 420, pp. 660-664. 18. Triantafyllou, G. S., Triantafyllou, M. S. and Grosenbaugh, M. A. 1993 Optimal thrust development in oscillating foils with application to fish propulsion. J. Fluid Struct. 7, pp. 205-224. 19. Tuncer, I. H. and Platzer., M. F. 1996 Thrust generation due to airfoil flapping. AIAA Journal 34, pp. 324-331. 20. Wang, Z. J. 2000 Vortex shedding and frequency selection in flapping flight. J. Fluid Mech. 410, pp. 323-341. 21. Williamson, C. H. K. and Roshko, A. 1988 Vortex formation in the wake of an oscillating cylinder. J. Fluids and Struct. 2, pp.355-381. 22. Willmott, P.: Unsteady lifting-line theory by the method of matched asymptotic expansions. J. Fluid. Mech. 186, 1988, p. 303-320. Un studiu numeric al curgerii 2-D in jurul unui profil batant Rezumat Articolul exploreaza doua caracteristici fundamentale ale zborului cu profil batant (zborul pasarilor). Prima parte prezinta un studiu computational al fizicii fluidelor unui profil cu miscare de “bataie” pentru a elucida caracteristicile importante ale acestor curgeri si a determina cum este raportata fizica curgerii la parametri importanti, cum sunt consumul de putere si randamentul. A doua parte prezinta o metoda de obtinere a unui model de control pentru acest tip de zbor. Folosind metoda de descompunere corespunzatoare (POD) , sunt generate un set de functii de baza ortogonale pentru simularea curgerii pentru diferiti parametrii de bataie si tangaj a profilului. Sunt determinate efectele acestor aproximatii asupra preciziei modelului. Cuvinte cheie: profil batant, ecuatii Navier-Stokes, descompunere ortogonala (POD)