Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Mercury-arc valve wikipedia , lookup
Transformer wikipedia , lookup
Skin effect wikipedia , lookup
Mains electricity wikipedia , lookup
Current source wikipedia , lookup
Electric motor wikipedia , lookup
Commutator (electric) wikipedia , lookup
Electrification wikipedia , lookup
Power engineering wikipedia , lookup
Switched-mode power supply wikipedia , lookup
Induction motor wikipedia , lookup
Power MOSFET wikipedia , lookup
Voltage optimisation wikipedia , lookup
Power electronics wikipedia , lookup
Rectiverter wikipedia , lookup
Stepper motor wikipedia , lookup
Electric machine wikipedia , lookup
Brushed DC electric motor wikipedia , lookup
Alternating current wikipedia , lookup
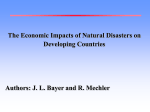
1 of 4 LOSS MINIMIZATION IN DC MOTOR DRIVES DE ANGELO C., BOSSIO G., GARCÍA G. Grupo de Electrónica Aplicada (GEA) Facultad de Ingeniería, Universidad Nacional de Río Cuarto Ruta Nac. #36 Km. 601, 5800 Río Cuarto, Argentina E-mail: cdeangelo@; gbossio@; [email protected] Keywords: Electrical Machinery Control, Electrical Drives, Power electronics. Abstract: In this work, a method to minimize DC Motor Drive losses is presented. It is based on a model that includes motor and converter losses. The method is theoretically presented and experimental results to validate the proposed model are shown. 1. Introduction According to some researches, the majority of the installed electric machines operate at two thirds or less of their rated load (Nailen 1989). This means that there is margin to improve the efficiency in these machines. Fig. 1 shows, according to experimental results, how the drive efficiency raises when the excitation is adjusted for each steady state operating point, principally for a power demand less than its rated value. To minimize the DC machine losses in steady state there are, basically, two different strategies.(Margaris 1991). The first one measures the speed and armature current and, via a loss model, determines the optimal excitation value. The second one measures the incoming power to the drive and searches for the optimal excitation value. 1.8 Optimal efficiency / Nominal efficiency It is well known that when a DC machine power demand is less than its rated value, it is not necessary to maintain the excitation at its maximum value. Excessive excitation increases the machine copper and iron losses. Therefore, the excitation can be adjusted according to the load requirements to reduce drive losses in steady state. 1.9 1.7 200 rpm 1.6 400 rpm 1.5 600 rpm 1.4 800 rpm 1.3 1.2 1.1 1 0.20 0.30 0.40 0.50 0.60 0.70 0.80 0.90 1.00 Output Power [pu] Fig. 1. Optimal efficiency obtained by controlling field current for different operating points (experimental results). In the present work, a loss-model-based controller, that includes converter losses, is proposed to obtain a good dynamic response. Moreover, to correct the error caused by parameter variations, this controller uses the measurement of the drive input power to “fine tune” the optimization during steady state. 2. Drive Model Including Losses Losses in a DC Motor Drive (DCMD) depend on the armature current, the field current and the machine speed. The expressions of the most relevant drive losses will be described in the following paragraphs. 2 of 4 2.1 Copper Losses, PCu These are due to the electric current flowing through the armature and field windings, and are given by (1), where Ia, If, Ra and Rf are the armature and field currents, and the armature and field resistances, respectively. (1) PCu Ra .I a 2 R f .I f 2. 1) IGBT Conduction Losses: These losses are modeled by considering a linear approximation of the device data sheet curves. Therefore, the conduction losses in each IGBT are: Pc Vt a.I c .I c .D, 2.2 Brush Contact Losses, Pe As the armature current flows, an electric arc is formed between the brushes and the collector. The arc voltage drop, Ve , can be considered constant for every load condition (Langsdorf 1958). Therefore, these losses can be represented by: Pe Ve .I a . (2) 2.3 Iron Losses, PFe These are eddy currents and hysteresis losses that can be represented by (3), where cp and ch are the eddy currents and hysteresis losses coefficients, respectively, is the rotor speed, and is the flux produced by the excitation current (Langsdorf 1958). PFe c p .2 .2 ch ..2 . (3) These losses can be modeled as a non-linear resistance connected in parallel with the armature. The expression of this iron loss resistance can be obtained by considering that the iron losses, based on the proposed model, are: (4) E 2 PFe a , RPFe (6) where Ic is the collector current, Vt and a are constants which depend on the IGBT characteristics and D is the duty cycle. 2) IGBT Switching Losses: These losses are modeled knowing the IGBT turn-on and turn-off energy, according to a linear approximation of the device data sheet curves: Pon f .h.I c .k v , Poff f .m.I c .k v , (7) where Pon are the turn-on losses, Poff are the turnoff losses, f is the switching frequency, h and m are constants, and kv is a constant that depends on the collector – emitter voltage, VDC, and on the test voltage of the utilized components, Vtest. 3) Diode Conduction Losses: These losses are modeled considering a linear approximation of the device. These losses, for each diode, are given by: Pcd Vtd ad .I fd .I fd .1 D , (8) where Ifd is the forward current and Vtd and ad are constants. where RPFe is the iron loss resistance, and Ea = Ke.. is the back EMF. Equaling (3) and (4), the iron loss resistance yields: RPFe manual data sheets. The converter losses can be separated into the following components: K e 2 . k . 2 , c p . k1 k1 (5) 2 where k1 = ch /cp and k2 = Ke /cp. Losses in the active device due to the reverse recovery of the diode and diode switching losses can be neglected since they represent, approximately, only 1.5% and 0.4%, respectively, of the converter total losses. By considering the losses described before, replacing Ic and Ifd currents by the motor armature current, and the duty cycle by its expression as a function of the motor variables, 2.4 Converter Losses, Pconv In this work only the armature converter losses were modeled since the field converter losses can be neglected if compared with the armature converter losses. Based on an IGBT simplified model (Clemente 1996), the parameters which the losses depend on can be defined and their values can be obtained from the D 1 Ea I .R a a 1 , 2 VDC VDC (9) the total converter losses (2 IGBTs + 2 diodes) yields: Pconv Vt 2. f .kv .h m Vtd .I a a ad .I a 2 . (10) 3 of 4 From (10), it can be concluded that the converter losses can be modeled by a term that is a function of the armature current, and other term that depends on the second power of the armature current. Therefore, losses can be represented as a battery, Econv (which is a function of the switching frequency f, the DC link voltage VDC and the component parameters) and a resistance, Rconv, which only depends on the component parameters: Pconv Econv.I a Rconv.I a 2 . Based on the proposed model, an algorithm to control the DCMD torque or speed by driving independently the armature and field currents was implemented. A speed or torque control loop was closed through the armature current while a field current control loop was closed to minimize losses for any operating point. (11) From these equations it can be seen that converter losses do not depend on the machine speed, since the model parameters do not include the back EMF. These results were verified experimentally. 2.5 Total Power Loss, Pt Based on the stated, the total DCMD losses can be represented by the following equation: Pt Ra Rconv .I a 2 Ve Econv .I a 4. Proposal to Implement the Controller (12) 2 2 R f K . .I f 2 . RPFe In (12), a linear relationship between flux and field current is assumed . Saturation can be neglected because the aim of this work is to find a model to minimize losses reducing the excitation. Then, the back EMF can be expressed as Ea = K.If.. Based on the considerations above, a DCMD equivalent circuit, including losses, as shown in Fig. 2, is proposed 4.1 Losses Minimization To design the field current control loop, an excitation condition, able to produce the minimum losses for each operating point, must be found. Assuming that the DC machine is in steady state, speed and torque (Te) can be considering constant to obtain the minimum losses condition. Considering the linear relationship between flux and field current, the lossess minimization condition can be derived from: Pt I f (13) 0, Te , from which the following equation can be obtained: 2.Ra Rconv .I a 2 Ve Econv .I a (14) K 2 .2 2 2. R f .I f . RPFe Operating (14), the following loss minimization condition can be obtained: If Fig. 2. Drive model including losses. 3. Experimental Validation of the Proposed Model From different tests, the proposed model parameters were obtained. Fig. 3 shows a comparison between theoretical and experimental results that validate the proposed model. 2.Ra Rconv .I a 2 Ve Econv .I a . 2. R f k ..k2 (15) Equation (15) allows to calculate the optimum field-current value that minimizes the DCMD losses for a specific operating point. To simplify the implementation, in this equation, the iron losses resistance RPFe is substituted by its equivalent (5), and the constant k K 2 / k1 . As the algorithm depends on the system parameters, which can change with temperature, time, different machines, etc., the minimum loss condition calculated by (15) is not exact. To solve this inconvenience, a control loop, to perform a “fine tuning” of the field current value to minimize the DCMD losses is proposed. This loop is closed measuring the DC link 4 of 4 power (DC link voltage VDCL times DC link current IDCL), . Clemente S. “A Simple Tool for Interactive Design of Inverters,” PCIM OnLine. 1996. The proposed controller is shown in Fig. 4. Lehonard W. Control of Electrical Drives, 2nd ed., SpringerVerlag, Germany, 1995. 5. Conclusions In this work, a DCMD model including copper and iron motor losses, and converter losses is proposed. 0.70 1000 r.p.m. 0.60 600 r.p.m. 0.50 Efficiency 400 r.p.m. 0.40 200 r.p.m. 0.30 0.20 Proposed model Experimental results 0.10 0.00 0.00 5.00 10.00 15.00 20.00 25.00 Torque [Nm] Fig. 3. Experimental and simulated DCMD efficiency with constant field current for different speeds. * ia * Regulator - Langsdorf A. Principles of direct-current machines, McGraw – Hill Book Company, New York, 1958. Current controled converter ia Field current control i f~ vDCL i f* Current controled converter rriente if Fine tuning if control iDCL Fig. 4. Proposed Controller. This model was experimentally validated. Based on this model, an algorithm to minimize the DCMD losses, controlling independently the armature and field currents is proposed. References Nailen R. “Can field tests prove motor efficiency?,” IEEE Trans. on Industry Applications, vol. 25, 1989. Margaris N., Goutas T., Doulgeri Z., and Paschali A. “Loss Minimization in DC Drives,” IEEE Trans. On Industrial Electronics, vol. 38, No. 5, pp. 328–336. 1991.