Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Factorization of polynomials over finite fields wikipedia , lookup
Quartic function wikipedia , lookup
Polynomial ring wikipedia , lookup
Eisenstein's criterion wikipedia , lookup
Quadratic form wikipedia , lookup
Tensor operator wikipedia , lookup
Determinant wikipedia , lookup
Factorization wikipedia , lookup
Symmetry in quantum mechanics wikipedia , lookup
System of linear equations wikipedia , lookup
Matrix (mathematics) wikipedia , lookup
System of polynomial equations wikipedia , lookup
Non-negative matrix factorization wikipedia , lookup
Cartesian tensor wikipedia , lookup
Orthogonal matrix wikipedia , lookup
Linear algebra wikipedia , lookup
Basis (linear algebra) wikipedia , lookup
Fundamental theorem of algebra wikipedia , lookup
Bra–ket notation wikipedia , lookup
Singular-value decomposition wikipedia , lookup
Jordan normal form wikipedia , lookup
Four-vector wikipedia , lookup
Perron–Frobenius theorem wikipedia , lookup
Matrix calculus wikipedia , lookup
Matrix multiplication wikipedia , lookup
Matrix Analysis
Basic Operations
A matrix is a rectangular array of elements arranged in horizontal rows and vertical
columns, and usually enclosed in brackets. A matrix is real-valued (or, simply, real) if
all its elements are real numbers or real-valued functions; it is complex-valued if at
least one element is a complex number or a complex-valued function. If all its
elements are numbers, then a matrix is called a constant matrix.
Matrices are designated by boldface uppercase letters. A general matrix A having r
rows and с columns may be written
a11
a
A 21
a r1
a12
a22
a11
a1c
a2c
arc
where the elements of the matrix are double subscripted to denote location. By
convention, the row index precedes the column index, thus, a25 represents the element
of A appearing in the second row and fifth column, while a31 represents the element
appearing in the third row and first column. A matrix A may also be denoted as [aij],
where aij denotes the general element of A appearing in the ith row and jth column.
A matrix having r rows and с columns has order (or size) "r by c," usually written
rc. Two matrices are equal if they have the same order and their corresponding
elements are equal.
The transpose of a matrix A, denoted as AT, is obtained by converting the rows of A
into the columns of A one at a time in sequence. If A has order mn, then AT has
order nm.
Vectors and DOT Products
A vector is a matrix having either one row or one column. A matrix consisting of a
single row is called a row vector; a matrix having a single column is called a column
vector. The dot product А-В of two vectors of the same order is obtained by
multiplying together corresponding elements of A and В and then summing the
results. The dot product is a scalar, by which we mean it is of the same general type as
the elements themselves.
Matrix Addition and Matrix Subtraction
The sum A + В of two matrices A = [aij] and В = [bij] having the same order is the
matrix obtained by adding corresponding elements of A and B. That is,
A + B = [aij] + [aij] = [aij + bij]
Matrix addition is both associative and commutative. Thus,
A + (B + C) = (A + В) + С and A + В = В + А
The matrix subtraction A – В is denned similarly: A and В must have the same order,
and the subtractions must be performed on corresponding elements to yield the matrix
[aij – bij].
Scalar Multiplication and Matrix Multiplication
For any scalar k, the matrix kA (or, equivalently, Ak) is obtained by multiplying every
element of A by the scalar k. That is, kA= k[aij] = [kaij].
Let A=[aij] and B = [bij] have orders rp and pc, respectively, so that the number of
columns of A equals the number of rows of B. Then the product AB is defined to be
the matrix С = [cij] of order rс whose elements are given by
p
cij aik bkj
i 0, 1, 2, , r;
j 0, 1, 2, c
k 1
Each element cij of AB is a dot product; it is obtained by forming the transpose of the
ith row of A and then taking its dot product with the yth column of B.
Matrix multiplication is associative and distributes over addition and subtraction; in
general, it is not commutative. Thus,
A(BC) = (AB)C
A(B + C) = AB + AC
(B - C)A = BA - CA
but, in general, AB ВА. Also,
(AB)T=ATBT
Linear Transformation
Introduction
Suppose S = {u1, u2,..., un} is a basis of a vector space V over a field k and, for v V,
suppose
v = alu1 + a2u2 + … +апиn
Then the coordinate vector of v relative to the basis S, which we write as a column
vector unless otherwise specified or implied, is denoted and defined by
a1
a
vs 2 a1
an
a2 an
T
The mapping v[v]S, determined by the basis S, is an isomorphism between
V and the space Kn
Matrix Representation of a Linear Operator
Let T be a linear operator on a vector space V over a field K and suppose S = {u1, u2,
...,un} is a basis of V. Now T(u1), ..., Т(un) are vectors in V and so each is a linear
combination of the vectors in the basis S; say,
T(u1) = a11u1 + a12u1 + … + a1nu1
T(u2) = a21u1 + a22u1 + … + a2nu1
………………………………….
T(un) = an1u1 + an2u1 + … + annu1
The following definition applies.
Definition: The transpose of the above matrix of coefficients, denoted by mS(T) or
[T]S, is called the matrix representation of T relative to the basis S or
simply the matrix of T in the basis S; that is,
a11
a
TS 21
an1
a12
a22
an 2
a1n
a2 n
ann
(The subscript S may be omitted if the basis S is understood.)
Remark: Using the coordinate (column) vector notation, the matrix representation of
T may also be written in the form
mT= [T] = ([T(ul)], [T(u2)],..., [T(un)])
that is, the columns of m(T) are the coordinate vectors ([T(ul)], [T(u2)],..., [T(un)].
Example 1
(a)
Let V be the vector space of polynomials in t over R of degree 3, and let
D:VV be the differential operator defined by D(p(t)) = d(p(t))/dt. We
compute the matrix of D in the basis {1, t, t2, t3}.
2
3
D(1) = 0 = 0 + 0t + 0t + 0t
D(t) =1 = 1 + 0t + 0t2 + 0t3
D(t3) = 3t2 = 0 + 0t + 3t2 + 0t3
0
0
D
0
0
1 0 0
0 2 0
0 0 3
0 0 0
[Note that the coordinate vectors D(l), D(t), D(t2), and D(t3) are the columns, not the
rows, of [D].]
(b)
Consider the linear operator F : R2 R2 defined by F(x, y) = (4x2y,
2x+y) and the following bases of R2:
(c)
S={m,=A. 1),мг = (-1,0)} and E = {e, = A, 0), e2 = @, 1)}
(d)
We have
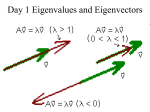
Eigenvalues and Eigenvectors
CHARACTERISTIC EQUATION
Consider the problem of solving the system of two first-order linear differential
equations, du1/dt = 7u1 − 4u2 and du2/dt = 5u1 − 2u2. In matrix notation, this system is
or equivalently, u'=Au
Eq(1)
u1
u1
7 4
, A
and u
u
u . Because solutions of a single
5 2
2
2
where u
equation u' = λu have the form u = αeλt, we are motivated to seek solutions of Eq(1)
that also have the form
u1 = α1eλt and u2 = α2eλt.
Eq(2)
Differentiating these two expressions and substituting the results in Eq(1) yields
In other words, solutions of Eq(1) having the form Eq(2) can be constructed provided
1
in the matrix equation Ax = λx can be found. Clearly,
2
solutions for λ and x =
x=0 trivially satisfies Ax = λx, but x = 0 provides no useful information concerning
the solution of Eq(1). What we really need are scalars λ and nonzero vectors x that
satisfy Ax = λx. Writing Ax = λx as (A − λI) x = 0 shows that the vectors of interest
are the nonzero vectors in N (A − λI) . But N (A − λI) contains nonzero vectors if and
only if A − λI is singular. Therefore, the scalars of interest are precisely the values of
λ that make A − λI singular or, equivalently, the λ ’s for which det (A − λI) = 0.
These observations motivate the definition of eigenvalues and eigenvectors.
Eigenvalues and Eigenvectors
For an n × n matrix A, scalars λ and vectors xn×1 0 satisfying Ax = λx are called
eigenvalues and eigenvectors of A, respectively, and any such pair, (λ, x), is called
an eigenpair for A. The set of distinct eigenvalues, denoted by σ (A) , is called the
spectrum of A.
λ σ (A) A − λI is singular det (A − λI) = 0.
Eq(3)
{x 0| x N (A − λI)_ is the set of all eigenvectors associated with λ. From
now on, N (A − λI) is called an eigenspace for A.
Nonzero row vectors y* such that y*(A − λI) = 0 are called lefthand
eigenvectors for A
Let’s now face the problem of finding the eigenvalues and eigenvectors of the matrix
7 4
appearing in Eq(1). As noted in Eq(3), the eigenvalues are the scalars
A
5
2
λ for which det (A − λI) = 0. Expansion of det (A − λI) produces the second-degree
polynomial
which is called the characteristic polynomial for A. Consequently, the eigenvalues
for A are the solutions of the characteristic equation p(λ) = 0 (i.e., the roots of the
characteristic polynomial), and they are λ = 2 and λ = 3. The eigenvectors associated
with λ = 2 and λ = 3 are simply the nonzero vectors in the eigenspaces N (A − 2I) and
N (A − 3I), respectively. But determining these eigenspaces amounts to nothing more
than solving the two homogeneous systems, (A − 2I) x = 0 and (A − 3I) x = 0.
For λ = 2,
For λ = 3,
In other words, the eigenvectors of A associated with λ = 2 are all nonzero multiples
of x = (4/5 1)T , and the eigenvectors associated with λ = 3 are all nonzero multiples of
y = (1 1)T . Although there are an infinite number of eigenvectors associated with
each eigenvalue, each eigenspace is one dimensional, so, for this example, there is
only one independent eigenvector associated with each eigenvalue. Let’s complete the
discussion concerning the system of differential equations u' = Au in Eq(1). Coupling
Eq(2) with the eigenpairs (λ1, x) and (λ2, y) of A computed above produces two
solutions of u' = Au, namely,
It turns out that all other solutions are linear combinations of these two particular
solutions.
Below is a summary of some general statements concerning features of the
characteristic polynomial and the characteristic equation.
Characteristic Polynomial and Equation
The characteristic polynomial of An×n is p(λ) = det (A − λI). The
degree of p(λ) is n, and the leading term in p(λ) is (−1)nλn.
The characteristic equation for A is p(λ) = 0.
The eigenvalues of A are the solutions of the characteristic equation or,
equivalently, the roots of the characteristic polynomial.
Altogether, A has n eigenvalues, but some may be complex numbers
(even if the entries of A are real numbers), and some eigenvalues may
be repeated.
If A contains only real numbers, then its complex eigenvalues must
occur in conjugate pairs—i.e., if λ σ (A) , then σ (A) .
Proof. The fact that det (A − λI) is a polynomial of degree n whose leading term is
(−1)nλn follows from the definition of determinant
Then
is a polynomial in λ. The highest power of λ is produced by the term
earlier contained the proof that the eigenvalues are precisely the solutions of the
characteristic equation, but, for the sake of completeness, it’s repeated below:
The fundamental theorem of algebra is a deep result that insures every polynomial of
degree n with real or complex coefficients has n roots, but some roots may be
complex numbers (even if all the coefficients are real), and some roots may be
repeated. Consequently, A has n eigenvalues, but some may be complex, and some
may be repeated. The fact that complex eigenvalues of real matrices must occur in
conjugate pairs is a consequence of the fact that the roots of a polynomial with real
coefficients occur in conjugate pairs.
1 1
1
1
Example: Determine the eigenvalues and eigenvectors of A
Solution: The characteristic polynomial is
so the characteristic equation is λ2 − 2λ+2 = 0. Application of the quadratic formula
yields
so the spectrum of A is σ (A) = {1 + i, 1 − i}. Notice that the eigenvalues are complex
conjugates of each other—as they must be because complex eigenvalues of real
matrices must occur in conjugate pairs. Now find the eigenspaces.
For λ = 1 + i,
For λ = 1− i,
In other words, the eigenvectors associated with λ1 = 1 + i are all nonzero multiples of
x1 = (i 1)T , and the eigenvectors associated with λ2 = 1 − i are all nonzero multiples
of x2 = (−i 1)T . In previous sections, you could be successful by thinking only in
terms of real numbers and by dancing around those statements and issues involving
complex numbers. But this example makes it clear that avoiding complex numbers,
even when dealing with real matrices, is no longer possible—very innocent looking
matrices, such as the one in this example, can possess complex eigenvalues and
eigenvectors.