Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Rotation matrix wikipedia , lookup
Euclidean vector wikipedia , lookup
Exterior algebra wikipedia , lookup
System of linear equations wikipedia , lookup
Determinant wikipedia , lookup
Matrix (mathematics) wikipedia , lookup
Non-negative matrix factorization wikipedia , lookup
Covariance and contravariance of vectors wikipedia , lookup
Gaussian elimination wikipedia , lookup
Principal component analysis wikipedia , lookup
Vector space wikipedia , lookup
Jordan normal form wikipedia , lookup
Cayley–Hamilton theorem wikipedia , lookup
Orthogonal matrix wikipedia , lookup
Perron–Frobenius theorem wikipedia , lookup
Singular-value decomposition wikipedia , lookup
Eigenvalues and eigenvectors wikipedia , lookup
Matrix calculus wikipedia , lookup
Matrix multiplication wikipedia , lookup
Vector space
Definition (over reals)
A set X is called a vector space over IR if addition and scalar multiplication are defined and satisfy for all x, y, x ∈
X and λ, µ ∈ IR:
• Addition:
associative x + (y + z) = (x + y) + z
commutative x + y = y + x
identity element ∃0 ∈ X : x + 0 = x
inverse element ∀x ∈ X ∃x0 ∈ X : x + x0 = 0
• Scalar multiplication:
distributive over elements λ(x + y) = λx + λy
distributive over scalars (λ + µ)x = λx + µx
associative over scalars λ(µx) = (λµ)x
identity element ∃1 ∈ IR : 1x = x
Properties and operations in vector spaces
subspace Any non-empty subset of X being itself a vector space (E.g. projection)
linear combination given λi ∈ IR, xi ∈ X
n
X
λi xi
i=1
span The span of vectors x1 , . . . , xn is defined as the set of their linear combinations
( n
)
X
λi xi , λi ∈ IR
i=1
Basis in vector space
Linear independency
A set of vectors xi is linearly independent if none of them can be written as a linear combination of the others
Basis
• A set of vectors xi is a basis for X if any element in X can be uniquely written as a linear combination of vectors
xi .
• Necessary condition is that vectors xi are linearly independent
• All bases of X have the same number of elements, called the dimension of the vector space.
Linear maps
Definition
Given two vector spaces X , Z, a function f : X → Z is a linear map if for all x, y ∈ X , λ ∈ IR:
• f (x + y) = f (x) + f (y)
• f (λx) = λf (x)
Linear maps as matrices
A linear map between two finite-dimensional spaces X , Z of dimensions n, m can always be written as a matrix:
• Let {x1 , . . . , xn } and {z1 , . . . , zm } be some bases for X and Z respectively.
• For any x ∈ X we have:
f (x) = f (
f (xi ) =
f (x) =
n
X
λi xi ) =
i=1
m
X
n
X
λi f (xi )
i=1
aij zj
j=1
n X
m
X
λi aij zj =
i=1 j=1
m X
n
m
X
X
(
λi aij )zj =
µj zj
j=1 i=1
j=1
Linear maps as matrices
• Matrix of basis transformation
M ∈ IRm×n
a11
= ...
am1
...
..
.
...
a1n
..
.
amn
• Mapping from basis coefficients to basis coefficients
Mλ = µ
Matrix properties
transpose Matrix obtained exchanging rows with columns (indicated with M T ). Properties:
(M N )T = N T M T
trace Sum of diagonal elements of a matrix
tr(M ) =
n
X
Mii
i=1
inverse The matrix which multiplied with the original matrix gives the identity
M M −1 = I
rank The rank of an n × m matrix is the dimension of the space spanned by its columns
2
Metric structure
Norm
A function || · || : X → IR+
0 is a norm if for all x, y ∈ X , λ ∈ IR:
• ||x + y|| ≤ ||x|| + ||y||
• ||λx|| = |λ| ||x||
• ||x|| > 0 if x 6= 0
Metric
A norm defines a metric d : X × X → IR+
0:
d(x, y) = ||x − y||
Note
The concept of norm is stronger than that of metric: not any metric gives rise to a norm
Dot product
Bilinear form
A function Q : X × X → IR is a bilinear form if for all x, y, z ∈ X , λ, µ ∈ IR:
• Q(λx + µy, z) = λQ(x, z) + µQ(y, z)
• Q(x, λy + µz) = λQ(x, y) + µQ(x, z)
A bilinear form is symmetric if for all x, y ∈ X :
• Q(x, y) = Q(y, x)
Dot product
Dot product
A dot product h·, ·i : X × X → IR is a symmetric bilinear form which is positive definite:
hx, xi ≥ 0 ∀ x ∈ X
A strictly positive definite dot product satisfies
hx, xi = 0 if f x = 0
Norm
Any dot product defines a corresponding norm via:
||x|| =
p
hx, xi
3
Properties of dot product
angle The angle θ between two vectors is defined as:
cosθ =
hx, zi
||x|| ||z||
orthogonal Two vectors are orthogonal if
hx, yi = 0
orthonormal A set of vectors {x1 , . . . , xn } is orthonormal if
hxi , xj i = δij
where δij = 1 if i = j, 0 otherwise.
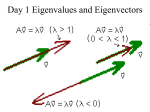
Eigenvalues and eigenvectors
Definition
Given a matrix M , the real value λ and (non-zero) vector x are an eigenvalue and corresponding eigenvector of
M if
M x = λx
Spectral decomposition
• Given an n × n symmetric matrix M , it is possible to find an orthonormal set of n eigenvectors.
• The matrix V having eigenvectors as columns is unitary, that is V T = V −1
• M can be factorized as:
M = V ΛV T
where Λ is the diagonal matrix of eigenvalues corresponding to eigenvectors in V
Eigenvalues and eigenvectors
Singular matrices
• A matrix is singular if it has a zero eigenvalue
M x = 0x = 0
• A singular matrix has linearly dependent columns:
4
Eigenvalues and eigenvectors
Symmetric matrices
Eigenvectors corresponding to distinct eigenvalues are orthogonal:
λhx, zi = hAx, zi
= (Ax)T z
= x T AT z
= xT Az
= hx, Azi
= µhx, zi
Note
An n × n symmetric matrix can have at most n distinct eigenvalues.
Positive semi-definite matrix
Definition
An n × n symmetrix matrix M is positive semi-definite if all its eigenvalues are non-negative.
Alternative sufficient and necessary conditions
• for all x ∈ IRn
xT M x ≥ 0
• there exists a real matrix B s.t.
M = BT B
Functional analysis
Cauchy sequence
• A sequence (xi )i∈IN in a normed space X is called a Cauchy sequence if for all > 0 there exists n ∈ IN s.t.
∀n0 , n00 > n ||xn0 − xn00 || < .
• A Cauchy sequence converges to a point x ∈ X if
lim ||xn − x|| → 0
n→∞
Banach and Hilbert spaces
• A space is complete if all Cauchy sequences in the space converge (to a point in the space).
• A complete normed space is called a Banach space
• A complete dot product space is called a Hilbert space
Hilbert spaces
• A Hilbert space can be (and often is) infinite dimensional
• Infinite dimensional Hilbert spaces are usually required to be separable, i.e. there exists a countable dense
subset: for any > 0 there exists a sequence (xi )i∈IN of elements of the space s.t. for all x ∈ X
min ||xi − x|| < xi
5