Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Modified Newtonian dynamics wikipedia , lookup
Centripetal force wikipedia , lookup
Analytical mechanics wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Classical mechanics wikipedia , lookup
Lagrangian mechanics wikipedia , lookup
Theoretical and experimental justification for the Schrödinger equation wikipedia , lookup
Relativistic mechanics wikipedia , lookup
N-body problem wikipedia , lookup
Spinodal decomposition wikipedia , lookup
Hunting oscillation wikipedia , lookup
Rigid body dynamics wikipedia , lookup
Routhian mechanics wikipedia , lookup
Relativistic quantum mechanics wikipedia , lookup
Work (physics) wikipedia , lookup
Classical central-force problem wikipedia , lookup
Equation of state wikipedia , lookup
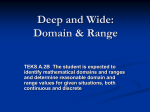
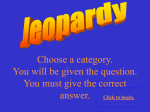
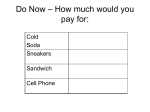
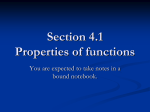
Ch 9 HW Day 6: p 296 – 308, #’s 79, 81, 83, 85, 88, 90*, 93, 94, 96*, 99 Notes for #81 Hi, kids! Just to let you know for yo-yo problems, the torque (T∙r) depends on “little” r, while the moment of inertia, I, assumes the disk (yo-yo) has radius “big” R (because it does!). That just means you can’t cancel all of the r’s out in the beginning. 81 •• Picture the Problem The forces acting on the yo-yo are shown in the figure. Apply Newton’s 2nd law in both translational and rotational form to obtain simultaneous equations in T, a, and from which we can eliminate and solve for T and a. Apply Newton’s 2nd law to the yo-yo: F y mg T m(a y ) so, T = mg – ma (1) and : Tr I 0 (2) Use a r to eliminate in equation (2) Tr I 0 Eliminate T between equations (1) and (3) to obtain: (mg – ma)r = (½ mR2)(a/r) (4) Cancel out the m’s, multiply both sides by r, distribute on the left. a r gr2 – ar2 = ½ R2a move – ar2 to the right side Substitute 12 mR 2 for I0 in equation (4): gr2 = ½ R2a + ar2 Factor out the a on the right side, and divide Solve for a: gr2 = (½ R2+ r2)a gr2 = a 2 2 (½ R + r ) (3) Substitute numerical values and evaluate a: Use equation (1) to solve for and evaluate T: a (9.81 m/s 2 )(0.01) 2 0.192 m/s 2 1 2 2 (0.1) (0.01) 2 T mg a 0.1kg 9.81m/s 2 0.192 m/s 2 0.962 N 88 •• Picture the Problem The three forces acting on the basketball are the weight of the ball, the normal force, and the force of friction. Because the weight can be assumed to be acting at the center of mass, and the normal force acts through the center of mass, the only force which exerts a torque about the center of mass is the frictional force. We can use Newton’s 2nd law to find a system of simultaneous equations that we can solve for the quantities called for in the problem statement. (a) Apply Newton’s 2nd law in both translational and rotational form to the ball: F F x mg sin f s ma , y Fn mg cos 0 and f s r I 0 0 Because the basketball is rolling without slipping we know that: Substitute in equation (3) to obtain: fsr I 0 From Table 9-1 we have: I 0 23 mr 2 Substitute for I0 and in equation (4) and solve for fs: Substitute for fs in equation (1) and solve for a: (b) Find fs using equation (5): (1) (2) a r fsr a (3) a r (4) 2 3 3 5 g sin mr 2 ar f s f s 23 m 53 g sin 23 ma 2 5 mg sin (5) (c) Solve equation (2) for Fn: Fn mg cos Use the definition of fs,max to obtain: f s,max s Fn s mg cos max Use the result of part (b) to obtain: 2 5 Solve for max: mg sin max s mg cos max max tan 1 52 s 94 ••• Picture the Problem Let M represent the combined mass of the two disks and their connecting rod and I their moment of inertia. The object’s initial potential energy is transformed into translational and rotational kinetic energy as it rolls down the incline. The force diagram shows the forces acting on this composite object as it rolls down the incline. Application of Newton’s 2nd law will allow us to derive an expression for the acceleration of the object. (a) Apply Newton’s 2nd law to the disks and rod: F F x Mg sin f s Ma , y Fn Mg cos 0 , (1) (2) and Eliminate fs and between equations (1) and (3) and solve for a to obtain: Express the moment of inertia of the two disks plus connecting rod: a 0 f s r I (3) Mg sin I M 2 r (4) I 2 I disk I rod 212 mdisk R 2 12 mrod r 2 mdisk R 2 12 mrod r 2 Substitute numerical values and evaluate I: I 20 kg 0.3 m 12 1 kg 0.02 m 2 1.80 kg m 2 2 Substitute in equation (4) and evaluate a: 41 kg 9.81 m/s 2 sin30 a 1.80 kg m 2 41 kg 0.02 m 2 0.0443 m/s 2 (b) Find from a: a 0.0443 m/s 2 2.21 rad/s 2 r 0.02 m (c) Express the kinetic energy of translation of the disks-plus-rod when it has rolled a distance s down the incline: K trans 12 Mv 2 Using a constant-acceleration equation, relate the speed of the disks-plus-rod to their acceleration and the distance moved: v 2 v02 2as or, because v0 = 0, Substitute to obtain: K trans Mas v 2 2 a s 41 kg 0.0443 m/s 2 2 m 3.63 J (d) Express the rotational kinetic energy of the disks after rolling 2 m in terms of their initial potential energy and their translational kinetic energy: Substitute numerical values and evaluate Krot: K rot U i K trans Mgh K trans K rot 41kg 9.81m/s 2 2 m sin30 3.63 J 399 J 93 ••• Picture the Problem The kinetic energy of the wheel is the sum of its translational and rotational kinetic energies. Because the wheel is a composite object, we can model its moment of inertia by treating the rim as a cylindrical shell and the spokes as rods. K K trans K rot Express the kinetic energy of the wheel: 12 M tot v 2 12 I cm 2 12 M tot v 2 12 I cm v2 R2 where Mtot = Mrim + 4Mspoke I cm I rim I spokes Express the moment of inertia of the wheel: M rim R 2 4 13 M spoke R 2 M rim 43 M spoke R 2 K 12 M tot v 2 12 M rim 43 M spoke R 2 Substitute for Icm in the equation for K: M 1 2 tot M rim 23 M spoke v 2 Rv 2 2 K 12 7.8 kg 3 kg 23 1.2 kg 6 m/s Substitute numerical values and evaluate K: 2 223 J 99 •• Picture the Problem The forces responsible for the rotation of the gears are shown in the diagram to the right. The forces acting through the centers of mass of the two gears have been omitted because they produce no torque. We can apply Newton’s 2nd law in rotational form to obtain the equations of motion of the gears and the not slipping condition to relate their angular accelerations. (a) Apply I to the gears to obtain their equations of motion: Because the gears do not slip relative to each other, the tangential accelerations of the points where they are in contact must be the same: Divide equation (1) by R1 to obtain: Divide equation (2) by R2 to obtain: 2 N m FR1 I11 (1) and FR2 I 2 2 (2) where F is the force keeping the gears from slipping with respect to each other. R11 R2 2 or 2 R1 1 12 1 R2 2 Nm I F 1 1 R1 R1 F I2 2 R2 (3) Add these equations to obtain: 2 N m I1 I 1 2 2 R1 R1 R2 Use equation (3) to eliminate 2: 2 N m I1 I 1 2 1 R1 R1 2 R2 Solve for 1 to obtain: Substitute numerical values and evaluate 1: 1 1 2Nm R I1 1 I 2 2 R2 2Nm 0.5 m 1 kg m 2 16 kg m 2 21 m 0.400 rad/s 2 Use equation (3) to evaluate 2: 2 12 0.400 rad/s 2 0.200 rad/s 2 (b) To counterbalance the 2N·m torque, a counter torque of 2 N·m must be applied to the first gear. Use equation (2) with 1 = 0 to find F: 2 N m FR1 0 and F 2Nm 2Nm 4.00 N R1 0.5 m