Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Specific impulse wikipedia , lookup
Jerk (physics) wikipedia , lookup
Fictitious force wikipedia , lookup
Classical mechanics wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Atomic theory wikipedia , lookup
Brownian motion wikipedia , lookup
Modified Newtonian dynamics wikipedia , lookup
Equations of motion wikipedia , lookup
Rigid body dynamics wikipedia , lookup
Electromagnetic mass wikipedia , lookup
Centripetal force wikipedia , lookup
Work (physics) wikipedia , lookup
Relativistic mechanics wikipedia , lookup
Newton's laws of motion wikipedia , lookup
Classical central-force problem wikipedia , lookup
Hooke's law wikipedia , lookup
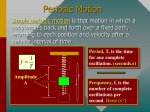
Springs and Simple Harmonic Motion LBS 164L OBJECTIVES: 1. To understand Hooke’s law (system under a restoring force) and to use various methods to determine the force constant of a spring. 2. To investigate the simple harmonic motion of a spring and a pendulum, and to understand the restoring force in both cases. APPARATUS: Spring, string, masses, digital timer, and stand with attached measuring stick. THEORY: Many forces vary with position. That is, they can grow stronger or weaker as the position of the particle undergoing the force changes. One such example is the force exerted on a mass attached to a spring. As the particle is moved away from the attached spring, the spring will exert more force to restore it to the equilibrium position (where the spring and attached mass are not in motion). The same force will resist the compression of the spring. In both cases (compression and expansion of the spring), the restoring force increases as the distance the particle is moved from equilibrium increases. The importance of the spring system is that it is encountered in our daily lives in many ways (i.e. shock absorbers, analog wristwatches, grandfather clocks, and garage doors) as well as being used as a model for describing chemical bonds. In fact, practically all forces can be described as spring forces when the displacements are kept small. Hooke’s Law can very well approximate the force exerted by a spring: F(x) = -kx where x is the displacement from the equilibrium length of the spring, F(x) is the position dependent restoring force exerted by the spring on the particle, and k is the force constant of the spring (what is the negative sign showing us?). This is an approximation in that Hooke’s Law is the limiting case for small displacements. When a mass is added to the end of a spring and hung vertically, the force of gravity pulls the mass down until the force of the spring is pulling upwards with the same force. By knowing the mass (M) attached and measuring the displacement (x) from the equilibrium position, the force constant can be calculated by: Mg k x where g is the acceleration of gravity. The new equilibrium position established with the mass attached can be used to investigate Simple Harmonic Motion by applying a small SHM and Hooke's Law Page 1 LBS 164L perturbation (a displacement in this case) to the position of the mass. If the mass is displaced a small amount (say a few centimeters), then the spring will accelerate the mass toward the equilibrium position. Since this acceleration leaves the mass some velocity at the equilibrium position, it does not stop there, but instead continues until the force of the spring decelerates it to a turning point. At the turning point the mass has a velocity of zero and the spring starts to accelerate the mass downward again. This process continues until friction and heat loss drain the energy, and the mass and spring system settle into the equilibrium state it was in before the perturbation. The above mass-spring system is in Simple Harmonic Motion. A system in Simple Harmonic Motion is one where the displacement varies with time according to the relationship: x Acos( t ) where A, , and are constants of motion. The constant is the angular frequency and is defined as 2 2 f T where f is the frequency of vibration and T is the period. has units of rad/s and f has units of Hz. For the spring system we are investigating, the motion can be characterized by k M and the force constant can be determined by k = M2. But springs are not the only devices that move in simple harmonic motion. The first study done concerning Simple Harmonic Motion was that of Galileo on the Simple Pendulum. Galileo found that the frequency (or period) for the oscillation of a pendulum was dependent only upon the length of the pendulum and not on the mass. This discovery lead directly to more accurate clocks. This relationship can be summed up as: g . L where L is the length of the pendulum and g is the gravitational constant. Procedure: Exploring the Simple Pendulum 1. Tie some string to a weight holder, tie the other end of the string to the stand, and measure the length of the string-holder system. Make sure that the string is not so long that the holder hits the table. 2. Choose around 100g of mass and add it to the holder. Pull the mass and string to the side and release it. As the mass crosses the stand (zero), start the timer. Stop the timer when the mass has completed five full cycles (past zero five times going in the same direction). 3. Repeat step 2 using another mass. For this string length, calculate the frequency of these pendulums. What do you find that is interesting? 4. Repeat steps 1-3 with a different length string. SHM and Hooke's Law Page 2 LBS 164L 5. When did the frequencies change (when adding mass or changing string length or both)? Does this agree with theory? Using the theory above, calculate the expected frequencies for the experimental conditions and compare your experimental results to the calculated. Obtaining k from the force of gravity (Hooke’s Law) 1. Obtain a spring, a selection of fifty gram masses, and a weight holder if they are not already at your station. Hang the spring from the stand with a weight holder attached. Adjust the measuring stick on the stand so that the bottom of the weight holder is at zero. 2. Measure the displacement with at least three different masses added. The maximum displacement should be at least 6 cm. 4. Repeat step 2 at least two more times. 5. Using MS Excel, make a table to enter your data. For each mass, determine the best value of the displacement and its uncertainty. Calculate the force constant, k, and the uncertainty for each of the measurements of k. To find the uncertainty in k, assume each mass added has a value of 50.00 ± 0.03 g. 5. Using Kaleidagraph, make a plot of mass vs. displacement. Add error bars as needed and then do a linear best-fit line for the data. Display the equation showing the errors. What does the slope give you from the line? What should the intercept be? Obtaining k from the frequency (Simple Harmonic Motion) 1. To your spring, add a holder and a fifty gram mass if they are not already attached. Allow the system to become motionless. Adjust the measuring stick so that the bottom of the holder is zero. 2. Displace the bottom of the holder 3 or 4 centimeters and release. 3. As you release the mass, start the timer. 4. Stop the timer when the holder passes through the bottom point after five complete cycles. 5. Repeat the above at least two more times with this mass. 6. Using a four different masses, repeat steps 1-5. 7. In MS Excel, make a table and enter your data. Calculate the best value for the time and the uncertainty in time for each mass. Use the relation between the period, the spring constant and the mass to calculate and k. Note that the mass must now include the holder which has m = 20.0 ± 0.3 g. 1 8. Make a plot in Kaleidagraph of M vs. 2 from your data. Display the equation of the best-fit line showing the errors. What does this slope give you? Extra Credit Project: If you have time, see what happens to the spring constant k if two springs are hooked together. Does it get bigger or smaller? Can you explain why? SHM and Hooke's Law Page 3 LBS 164L