








Investigation
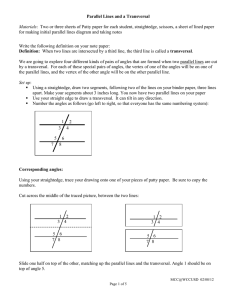
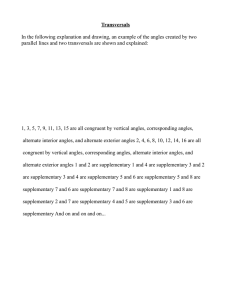
... triangles, Triangle DEG and Triangle FEG. Angles 1, 2, and 3 represent the interior angles of Triangle DEG and Angles 4, 5, and 6 represent the interior angles of Triangle FEG. ...
... triangles, Triangle DEG and Triangle FEG. Angles 1, 2, and 3 represent the interior angles of Triangle DEG and Angles 4, 5, and 6 represent the interior angles of Triangle FEG. ...

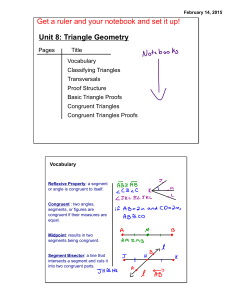
Vocabulary
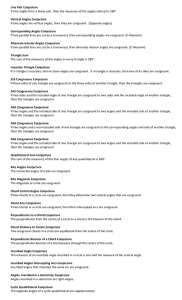
... Use a full sentence to write a definition for each of the following terms:* Complementary Angles are two angles whose measures add up to 90 degrees. Supplementary Angles are two angles whose measures add up to 180 degrees. A Diagonal is a line segment that connects two vertices of a polygon but is n ...
... Use a full sentence to write a definition for each of the following terms:* Complementary Angles are two angles whose measures add up to 90 degrees. Supplementary Angles are two angles whose measures add up to 180 degrees. A Diagonal is a line segment that connects two vertices of a polygon but is n ...


