



Assignment 4 answers Math 130 Linear Algebra
... One way is to show that the three standard vectors (1, 0, 0), (0, 1, 0), and (0, 0, 1) are linear combinations. Since all vectors in F 3 can be generated by them, if we can generate them, we’ll be able to generate all vectors. (This depends on the theorem: a linear combination of linear combinations ...
... One way is to show that the three standard vectors (1, 0, 0), (0, 1, 0), and (0, 0, 1) are linear combinations. Since all vectors in F 3 can be generated by them, if we can generate them, we’ll be able to generate all vectors. (This depends on the theorem: a linear combination of linear combinations ...




1. New Algebraic Tools for Classical Geometry
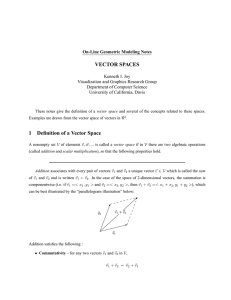
... As a rule, we use lower case letters to denote vectors, lower case Greek letters to denote scalars and calligraphic capital letters to denote sets. First, we define geometric algebra. Let V n be an n-dimensional vector space over real numbers R. The geometric algebra Gn = G(V n ) is generated from V ...
... As a rule, we use lower case letters to denote vectors, lower case Greek letters to denote scalars and calligraphic capital letters to denote sets. First, we define geometric algebra. Let V n be an n-dimensional vector space over real numbers R. The geometric algebra Gn = G(V n ) is generated from V ...

Lecture 11: High Dimensional Geometry, Curse of Dimensionality, Dimension Reduction
... A good approximation to picking a random point on the surface of Bn is by choosing random xi ∈ {−1, 1} independently for i = 1..n and normalizing to get √1n (x1 , ..., xn ). A better approximation is to pick each coordinate as a gaussian with mean 0 and variance 1/n. To get a point inside the ball, ...
... A good approximation to picking a random point on the surface of Bn is by choosing random xi ∈ {−1, 1} independently for i = 1..n and normalizing to get √1n (x1 , ..., xn ). A better approximation is to pick each coordinate as a gaussian with mean 0 and variance 1/n. To get a point inside the ball, ...



Vectors and Plane Geometry - University of Hawaii Mathematics
... three dimensional space R3 . Points P in the plane are described by pairs (a, b) of real numbers, where a and b stand for the x and y coordinates of the point P . This means, when we project P perpendicularly on the x–axis, then we get a, and when we project P on the y–axis, then we get b, see Figur ...
... three dimensional space R3 . Points P in the plane are described by pairs (a, b) of real numbers, where a and b stand for the x and y coordinates of the point P . This means, when we project P perpendicularly on the x–axis, then we get a, and when we project P on the y–axis, then we get b, see Figur ...

Math 310, Lesieutre Problem set #7 October 14, 2015 Problems for
... We want to find the general solution in parametric vector form, and then take the vectors that show up here. These span the set (in fact, they’re a basis for the nullspace in the lingo from this week). We need to get to rref: ...
... We want to find the general solution in parametric vector form, and then take the vectors that show up here. These span the set (in fact, they’re a basis for the nullspace in the lingo from this week). We need to get to rref: ...


Introduction to Vectors and Matrices
... forks in either of two ways. We can maintain symmetry (orthogonal form) or maintain positivity (Hermitian form) but not both. We will mostly here use the dot notation and call the inner product the dot product. But one should be aware that more than one inner product can be defined on the same space ...
... forks in either of two ways. We can maintain symmetry (orthogonal form) or maintain positivity (Hermitian form) but not both. We will mostly here use the dot notation and call the inner product the dot product. But one should be aware that more than one inner product can be defined on the same space ...





PDF (English
... how the dot product can be used to compute angles between vectors, or the relationship between the dot product of vectors and the angle between them. So, here I have two questions, two related questions for you. So the first one, you've got two vectors. i hat plus j hat plus 2 k hat. And a second ve ...
... how the dot product can be used to compute angles between vectors, or the relationship between the dot product of vectors and the angle between them. So, here I have two questions, two related questions for you. So the first one, you've got two vectors. i hat plus j hat plus 2 k hat. And a second ve ...


div, grad, and curl as linear transformations Let X be an open 1
... If X ⊂ Y is a subspace then there is a vector space X/Y called the quotient space which I will not describe3 . If X and Y are both subsets of some Rn , you can think of X/Y as all vectors in X which are perpendicular to Y . It turns out that dim(X/Y ) = k if and only if there are k linearly independ ...
... If X ⊂ Y is a subspace then there is a vector space X/Y called the quotient space which I will not describe3 . If X and Y are both subsets of some Rn , you can think of X/Y as all vectors in X which are perpendicular to Y . It turns out that dim(X/Y ) = k if and only if there are k linearly independ ...
Cross product

In mathematics and vector calculus, the cross product or vector product (occasionally directed area product to emphasize the geometric significance) is a binary operation on two vectors in three-dimensional space (R3) and is denoted by the symbol ×. The cross product a × b of two linearly independent vectors a and b is a vector that is perpendicular to both and therefore normal to the plane containing them. It has many applications in mathematics, physics, engineering, and computer programming. It should not be confused with dot product (projection product).If two vectors have the same direction (or have the exact opposite direction from one another, i.e. are not linearly independent) or if either one has zero length, then their cross product is zero. More generally, the magnitude of the product equals the area of a parallelogram with the vectors for sides; in particular, the magnitude of the product of two perpendicular vectors is the product of their lengths. The cross product is anticommutative (i.e. a × b = −b × a) and is distributive over addition (i.e. a × (b + c) = a × b + a × c). The space R3 together with the cross product is an algebra over the real numbers, which is neither commutative nor associative, but is a Lie algebra with the cross product being the Lie bracket.Like the dot product, it depends on the metric of Euclidean space, but unlike the dot product, it also depends on a choice of orientation or ""handedness"". The product can be generalized in various ways; it can be made independent of orientation by changing the result to pseudovector, or in arbitrary dimensions the exterior product of vectors can be used with a bivector or two-form result. Also, using the orientation and metric structure just as for the traditional 3-dimensional cross product, one can in n dimensions take the product of n − 1 vectors to produce a vector perpendicular to all of them. But if the product is limited to non-trivial binary products with vector results, it exists only in three and seven dimensions. If one adds the further requirement that the product be uniquely defined, then only the 3-dimensional cross product qualifies. (See § Generalizations, below, for other dimensions.)