Image Processing Fundamentals
... • Eigenvalues and eigenvectors are only defined for square matrices (i.e., m = n) • Eigenvectors are not unique (e.g., if v is an eigenvector, so is kv) • Suppose λ1, λ2, ..., λn are the eigenvalues of A, then: ...
... • Eigenvalues and eigenvectors are only defined for square matrices (i.e., m = n) • Eigenvectors are not unique (e.g., if v is an eigenvector, so is kv) • Suppose λ1, λ2, ..., λn are the eigenvalues of A, then: ...

1 The Chain Rule - McGill Math Department
... One important consequence of the matrix version of the chain rule is that if (y1 , y2 , · · · , yn ) = F (x1 , x2 , · · · , xn ) and (x1 , x2 , · · · , xn ) = G(y1 , y2 , · · · , yn ) are two transformations such that (x1 , x2 , · · · , xn ) = G(F (x1 , x2 , · · · , xn )) then the Jacobian matrices ...
... One important consequence of the matrix version of the chain rule is that if (y1 , y2 , · · · , yn ) = F (x1 , x2 , · · · , xn ) and (x1 , x2 , · · · , xn ) = G(y1 , y2 , · · · , yn ) are two transformations such that (x1 , x2 , · · · , xn ) = G(F (x1 , x2 , · · · , xn )) then the Jacobian matrices ...




doc
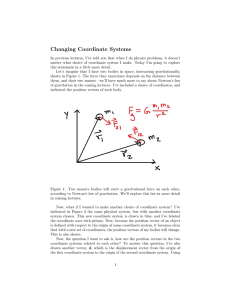
... Normally Newton’s second law is written as F=ma which means the force on an object is equal to the object’s mass times its acceleration, where bold indicates a vector. Consider gravity. The acceleration of gravity is independent of the object being pulled. The force of gravity is proportional to the ...
... Normally Newton’s second law is written as F=ma which means the force on an object is equal to the object’s mass times its acceleration, where bold indicates a vector. Consider gravity. The acceleration of gravity is independent of the object being pulled. The force of gravity is proportional to the ...







Here
... Solution: The conditions that W must satisfy are (a) (0, 0) ∈ W . That is, the zero vector of R2 must be in W. (b) For every x, y ∈ W , we must have the vector x + y ∈ W. That is, W is closed under addition. (c) For every x ∈ W and for every α ∈ R, we must have that α · x ∈ W. That is, W is closed u ...
... Solution: The conditions that W must satisfy are (a) (0, 0) ∈ W . That is, the zero vector of R2 must be in W. (b) For every x, y ∈ W , we must have the vector x + y ∈ W. That is, W is closed under addition. (c) For every x ∈ W and for every α ∈ R, we must have that α · x ∈ W. That is, W is closed u ...



Linear Transformations
... Mathematics has as its objects of study sets with various structures. These sets include sets of numbers (such as the integers, rationals, reals, and complexes) whose structure (at least from an algebraic point of view) arise from the operations of addition and multiplication with their relevant pro ...
... Mathematics has as its objects of study sets with various structures. These sets include sets of numbers (such as the integers, rationals, reals, and complexes) whose structure (at least from an algebraic point of view) arise from the operations of addition and multiplication with their relevant pro ...