Document
... Solution The pivot point is at the hinges of the door, opposite to where you were pushing the door. The force you used was 50N, at a distance 1.0m from the pivot point. You hit the door perpendicular to its plane, so the angle between the door and the direction of force was 90 degrees. Since = r x ...
... Solution The pivot point is at the hinges of the door, opposite to where you were pushing the door. The force you used was 50N, at a distance 1.0m from the pivot point. You hit the door perpendicular to its plane, so the angle between the door and the direction of force was 90 degrees. Since = r x ...


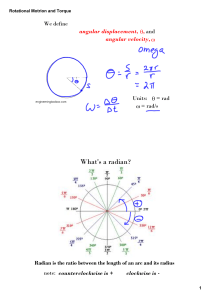
Rotational Dynamics and Static Equilibrium
... When forces have both vertical and horizontal components, in order to be in equilibrium an object must have no net torque, and no net force in either the x- or y-direction. ...
... When forces have both vertical and horizontal components, in order to be in equilibrium an object must have no net torque, and no net force in either the x- or y-direction. ...


UNIVERSITY OF TOYOTA HOT SHEET
... PROHIBITED. Price comparisons, if any, are based on Manufacturer’s Suggested Retail price. Actual dealer price may vary. Toyota Motor Sales, U.S.A., Inc., by the publication and/or dissemination of this publication does not create any warranties, either expressed or implied, as to Toyota products. T ...
... PROHIBITED. Price comparisons, if any, are based on Manufacturer’s Suggested Retail price. Actual dealer price may vary. Toyota Motor Sales, U.S.A., Inc., by the publication and/or dissemination of this publication does not create any warranties, either expressed or implied, as to Toyota products. T ...






AOCS
... motors). • For three-axes of torque, three wheels are necessary. Usually use four wheels for redundancy (use wheel speed biasing equation) • If external torques exist, wheels will angularly accelerate to counteract these torques. They will eventually reach an RPM limit (~3000-6000 RPM) at which time ...
... motors). • For three-axes of torque, three wheels are necessary. Usually use four wheels for redundancy (use wheel speed biasing equation) • If external torques exist, wheels will angularly accelerate to counteract these torques. They will eventually reach an RPM limit (~3000-6000 RPM) at which time ...
Physics 140 HOMEWORK Chapter 10B Q7. Figure 10
... XFBD for double-pulley (“device”): T downward at r on right; Fappl at top at R to left; n at com upward; mdevice g downward at com. ~a = 0. α CCW. FBD for box: T upward; mg down. ~a = 0.8 m/s2 upward. Make +x upward. Eq for box: T − mg = ma ⇒ T = m(g + a) = (30 kg)(9.8 + 0.8) m/s2 = 318 N. Torque Eq ...
... XFBD for double-pulley (“device”): T downward at r on right; Fappl at top at R to left; n at com upward; mdevice g downward at com. ~a = 0. α CCW. FBD for box: T upward; mg down. ~a = 0.8 m/s2 upward. Make +x upward. Eq for box: T − mg = ma ⇒ T = m(g + a) = (30 kg)(9.8 + 0.8) m/s2 = 318 N. Torque Eq ...


SolutionstoassignedproblemsChapter10
... the vertical axis . 46. (a) The free body diagrams are shown. Note that only the forces producing torque are shown on the pulley. There would also be a gravity force on the pulley (since it has mass) and a normal force from the pulley’s suspension, but they are not shown. (b) Write Newton’s second l ...
... the vertical axis . 46. (a) The free body diagrams are shown. Note that only the forces producing torque are shown on the pulley. There would also be a gravity force on the pulley (since it has mass) and a normal force from the pulley’s suspension, but they are not shown. (b) Write Newton’s second l ...
Concept Questions
... Step 1: Draw free body force diagrams for each object and indicate the point of application of each force Step 2: Select point to compute torque about (generally select center of ...
... Step 1: Draw free body force diagrams for each object and indicate the point of application of each force Step 2: Select point to compute torque about (generally select center of ...