





Torque and rotational inertia
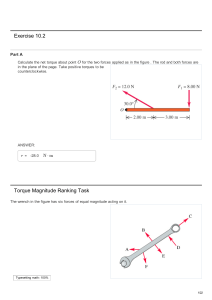
... Even if the acrobat was not there and the blue hat worker let go, the plank would still rotate clockwise, so there is a torque of gravity on the plank itself. In fact, because the plank is spread throughout the x-dimension, there are many torques acting on the many little bits of plank, each a diffe ...
... Even if the acrobat was not there and the blue hat worker let go, the plank would still rotate clockwise, so there is a torque of gravity on the plank itself. In fact, because the plank is spread throughout the x-dimension, there are many torques acting on the many little bits of plank, each a diffe ...
AP Physics – Applying Forces
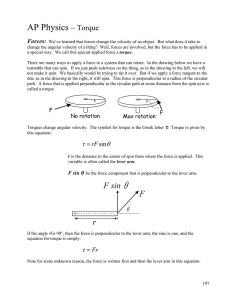
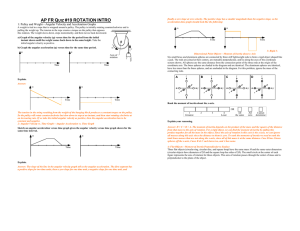
... turntable that can spin. If we just push sideways on the thing, as in the drawing to the left, we will not make it spin. We basically would be trying to tip it over. But if we apply a force tangent to the disc as in the drawing to the right, it will spin. This force is perpendicular to a radius of t ...
... turntable that can spin. If we just push sideways on the thing, as in the drawing to the left, we will not make it spin. We basically would be trying to tip it over. But if we apply a force tangent to the disc as in the drawing to the right, it will spin. This force is perpendicular to a radius of t ...




CHAPTER 9 ROTATIONAL DYNAMICS
... The space probe is initially moving with a constant translational velocity and zero angular velocity through outer space. a. When the two engines are fired, each generates a thrust T in opposite directions; hence, the net force on the space probe is zero. Since the net force on the probe is zero, th ...
... The space probe is initially moving with a constant translational velocity and zero angular velocity through outer space. a. When the two engines are fired, each generates a thrust T in opposite directions; hence, the net force on the space probe is zero. Since the net force on the probe is zero, th ...



Chapter 2 Vehicle Dynamics Modeling
... There are numerous integration routines that can be used to integrate the state space equations [15]. Two criteria for selecting which integration routine to use are the computation time and accuracy of the results. One such method is the Runge-Kutta routine, which has an accuracy of a Taylor series ...
... There are numerous integration routines that can be used to integrate the state space equations [15]. Two criteria for selecting which integration routine to use are the computation time and accuracy of the results. One such method is the Runge-Kutta routine, which has an accuracy of a Taylor series ...

Agenda
... • However, you must have enough torque to pull the arm and manipulator up and down. • You must also have enough torque to keep hold on the object the robot is manipulating. It is not just friction holding it there. ...
... • However, you must have enough torque to pull the arm and manipulator up and down. • You must also have enough torque to keep hold on the object the robot is manipulating. It is not just friction holding it there. ...
Moment of Inertia
... Angular Mechanics – Torque and moment of inertia Now let’s put it all together, we can calculate torque and moment of inertia, so let’s relate ...
... Angular Mechanics – Torque and moment of inertia Now let’s put it all together, we can calculate torque and moment of inertia, so let’s relate ...
2AngDyn - TuHS Physics
... Angular Mechanics – Torque and moment of inertia Now let’s put it all together, we can calculate torque and moment of inertia, so let’s relate ...
... Angular Mechanics – Torque and moment of inertia Now let’s put it all together, we can calculate torque and moment of inertia, so let’s relate ...



Rotational Equilibrium and Dynamics - Faculty
... solid, horizontal disk of radius 1.50 m is set in motion by wrapping a rope about the rim of the disk and pulling on the rope. What constant force must be exerted on the rope to bring the merry-go-round from rest to an angular speed of 0.500 rev/s in 2.00 s? Solution: This problem is clear enough wi ...
... solid, horizontal disk of radius 1.50 m is set in motion by wrapping a rope about the rim of the disk and pulling on the rope. What constant force must be exerted on the rope to bring the merry-go-round from rest to an angular speed of 0.500 rev/s in 2.00 s? Solution: This problem is clear enough wi ...
