
(1)
... (c) {u , v , w } if all three vectors are in R2 (d) {u , v , w } if the vector equation x1 u + x2 v + x3 w = 0 has only the trivial solution. (e) {u , v , w } if the volume of the box equal to six. ...
... (c) {u , v , w } if all three vectors are in R2 (d) {u , v , w } if the vector equation x1 u + x2 v + x3 w = 0 has only the trivial solution. (e) {u , v , w } if the volume of the box equal to six. ...

Multiplicative Inverses of Matrices and Matrix Equations 1. Find the
... where A is the coefficient matrix and B is the constant matrix ...
... where A is the coefficient matrix and B is the constant matrix ...


Algebraic functions
... unit length (column matrices or column vectors, see Chapter 18) y= a1f1+a2f2+a3f3+ ….+anfn F= b1f1+b2f2+b3f3+ ….+bnfn ...
... unit length (column matrices or column vectors, see Chapter 18) y= a1f1+a2f2+a3f3+ ….+anfn F= b1f1+b2f2+b3f3+ ….+bnfn ...

Skew-Tsankov algebraic curvature tensors in the Lorentzian setting
... In the Riemannian setting, a metric ϕ and any skew-symmetric endomorphism ψ can be simultaneously diagonalized (with 1-dimensional complex Jordan blocks) with respect to one another. This is not always true in the pseudoRiemannian setting, specifically in the Lorentzian setting. The simultaneous dia ...
... In the Riemannian setting, a metric ϕ and any skew-symmetric endomorphism ψ can be simultaneously diagonalized (with 1-dimensional complex Jordan blocks) with respect to one another. This is not always true in the pseudoRiemannian setting, specifically in the Lorentzian setting. The simultaneous dia ...


1. (14 points) Consider the system of differential equations dx1 dt
... (a) Solve the system if k = −2, x1 (0) = −3 and x2 (0) = 3. (b) Sketch the phase portrait for this system when k = −2. (c) For which values of k will the trajectories in the phase portrait be spirals into the origin? spirals out of the origin? Explain. 2. (14 points) Let R be the region in the plane ...
... (a) Solve the system if k = −2, x1 (0) = −3 and x2 (0) = 3. (b) Sketch the phase portrait for this system when k = −2. (c) For which values of k will the trajectories in the phase portrait be spirals into the origin? spirals out of the origin? Explain. 2. (14 points) Let R be the region in the plane ...




Overview Quick review The advantages of a diagonal matrix
... Overview Before the break, we began to study eigenvectors and eigenvalues, introducing the characteristic equation as a tool for finding the eigenvalues of a matrix: det(A − λI) = 0. ...
... Overview Before the break, we began to study eigenvectors and eigenvalues, introducing the characteristic equation as a tool for finding the eigenvalues of a matrix: det(A − λI) = 0. ...
HELM Workbook 22 (Eigenvalues and Eigenvectors) EVS Questions
... Which of the vectors below is an eigenvector, corresponding to the eigenvalue λ= 7 of the matrix ...
... Which of the vectors below is an eigenvector, corresponding to the eigenvalue λ= 7 of the matrix ...





Lecture 33 - Math TAMU
... We need to find a diagonal matrix B and an invertible matrix U such that A = UBU −1 . Suppose that v1 = (x1 , y1 ), v2 = (x2 , y2 ) is a basis for R2 formed by eigenvectors of A, i.e., Avi = λi vi for some λi ∈ R. Then we can take ...
... We need to find a diagonal matrix B and an invertible matrix U such that A = UBU −1 . Suppose that v1 = (x1 , y1 ), v2 = (x2 , y2 ) is a basis for R2 formed by eigenvectors of A, i.e., Avi = λi vi for some λi ∈ R. Then we can take ...

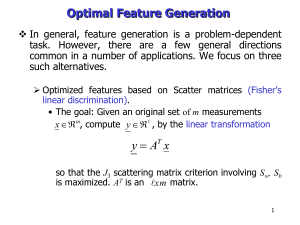
Feature Generation
... The above guarantees maximum J3 value. In this case: J3,x = J3,y. For a two-class problem, this results to the well known Fisher’s linear discriminant ...
... The above guarantees maximum J3 value. In this case: J3,x = J3,y. For a two-class problem, this results to the well known Fisher’s linear discriminant ...


Jordan normal form

In linear algebra, a Jordan normal form (often called Jordan canonical form)of a linear operator on a finite-dimensional vector space is an upper triangular matrix of a particular form called a Jordan matrix, representing the operator with respect to some basis. Such matrix has each non-zero off-diagonal entry equal to 1, immediately above the main diagonal (on the superdiagonal), and with identical diagonal entries to the left and below them. If the vector space is over a field K, then a basis with respect to which the matrix has the required form exists if and only if all eigenvalues of the matrix lie in K, or equivalently if the characteristic polynomial of the operator splits into linear factors over K. This condition is always satisfied if K is the field of complex numbers. The diagonal entries of the normal form are the eigenvalues of the operator, with the number of times each one occurs being given by its algebraic multiplicity.If the operator is originally given by a square matrix M, then its Jordan normal form is also called the Jordan normal form of M. Any square matrix has a Jordan normal form if the field of coefficients is extended to one containing all the eigenvalues of the matrix. In spite of its name, the normal form for a given M is not entirely unique, as it is a block diagonal matrix formed of Jordan blocks, the order of which is not fixed; it is conventional to group blocks for the same eigenvalue together, but no ordering is imposed among the eigenvalues, nor among the blocks for a given eigenvalue, although the latter could for instance be ordered by weakly decreasing size.The Jordan–Chevalley decomposition is particularly simple with respect to a basis for which the operator takes its Jordan normal form. The diagonal form for diagonalizable matrices, for instance normal matrices, is a special case of the Jordan normal form.The Jordan normal form is named after Camille Jordan.