
Problem Set 2 - Massachusetts Institute of Technology
... 1. Density matrices. A density matrix (also sometimes known as a density operator) is a representation of statistical mixtures of quantum states. This exercise introduces some examples of density matrices, and explores some of their properties. (a) Let |ψi = a|0i + b|1i be a qubit state. Give the ma ...
... 1. Density matrices. A density matrix (also sometimes known as a density operator) is a representation of statistical mixtures of quantum states. This exercise introduces some examples of density matrices, and explores some of their properties. (a) Let |ψi = a|0i + b|1i be a qubit state. Give the ma ...


Square Roots and Adjacency Matrices
... (as a matrix, technically speaking, isn’t spanning anything.) In the future / on the final!, make sure you don’t do this, and write a collection of vectors as, well, ...
... (as a matrix, technically speaking, isn’t spanning anything.) In the future / on the final!, make sure you don’t do this, and write a collection of vectors as, well, ...


Greatest Common Divisor of Two Polynomials Let a@) = A” + ay +
... as linear combinations of the remaining 6(a) - k columns (which are linearly independent), then the greatest common divisor is given by the coefficients of column k + ...
... as linear combinations of the remaining 6(a) - k columns (which are linearly independent), then the greatest common divisor is given by the coefficients of column k + ...






21-241 (Fall 15) Problems for Review Session (Sep 27, 2015) 1.
... (a) Differentiation is a linear transformation. (b) To prove that R2 restricted to x ≥ y is not a vector space, we want to show that the closure property does not hold. It suffices to show that there is a v = (xv , yv ) with xv ≥ yv , and its inverse −v = (−xv , −yv ) is not in the space since −xv ≤ ...
... (a) Differentiation is a linear transformation. (b) To prove that R2 restricted to x ≥ y is not a vector space, we want to show that the closure property does not hold. It suffices to show that there is a v = (xv , yv ) with xv ≥ yv , and its inverse −v = (−xv , −yv ) is not in the space since −xv ≤ ...


Uniqueness of Reduced Row Echelon Form
... Uniqueness of Reduced Row Echelon Form Many introductory linear algebra books either fail to mention this result, omit its proof, or present a proof which is unnecessarily complicated or uses arguments beyond the context in which the result occurs. Here’s a proof which, hopefully, suffers from none ...
... Uniqueness of Reduced Row Echelon Form Many introductory linear algebra books either fail to mention this result, omit its proof, or present a proof which is unnecessarily complicated or uses arguments beyond the context in which the result occurs. Here’s a proof which, hopefully, suffers from none ...
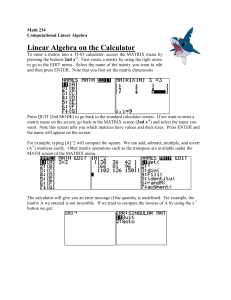
Computational Linear Algebra
... Press QUIT (2nd MODE) to go back to the standard calculator screen. If we want to enter a matrix name on the screen, go back to the MATRIX screen (2nd x-1) and select the name you want. Note this screen tells you which matrices have values and their sizes. Press ENTER and the name will appear on the ...
... Press QUIT (2nd MODE) to go back to the standard calculator screen. If we want to enter a matrix name on the screen, go back to the MATRIX screen (2nd x-1) and select the name you want. Note this screen tells you which matrices have values and their sizes. Press ENTER and the name will appear on the ...


2 - UCSD Math Department
... We skipped the example below and the equations of a plane. Equations of planes. a(x − x0 ) + b(y − y0 ) + c(z − z0 ) = 0, where (x0 , y0 , z0 ) is a point in the plane and n = (a, b, c) is normal to the plane. In fact, if (x, y, z) is a point in the plane then the vector (x − x0 , y − y0 , z − z0 ) ...
... We skipped the example below and the equations of a plane. Equations of planes. a(x − x0 ) + b(y − y0 ) + c(z − z0 ) = 0, where (x0 , y0 , z0 ) is a point in the plane and n = (a, b, c) is normal to the plane. In fact, if (x, y, z) is a point in the plane then the vector (x − x0 , y − y0 , z − z0 ) ...






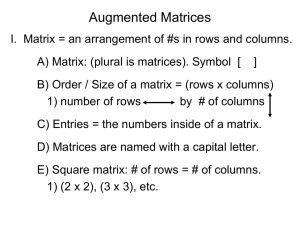
11.1: Matrix Operations - Algebra 1 and Algebra 2
... Matrix: A rectangular arrangement of numbers in horizontal rows and vertical columns. (*Organizes data) Element: each number in a matrix Dimensions of a Matrix: m x n (where m = #rows, and n = #columns) ...
... Matrix: A rectangular arrangement of numbers in horizontal rows and vertical columns. (*Organizes data) Element: each number in a matrix Dimensions of a Matrix: m x n (where m = #rows, and n = #columns) ...

Non-negative matrix factorization

NMF redirects here. For the bridge convention, see new minor forcing.Non-negative matrix factorization (NMF), also non-negative matrix approximation is a group of algorithms in multivariate analysis and linear algebra where a matrix V is factorized into (usually) two matrices W and H, with the property that all three matrices have no negative elements. This non-negativity makes the resulting matrices easier to inspect. Also, in applications such as processing of audio spectrograms non-negativity is inherent to the data being considered. Since the problem is not exactly solvable in general, it is commonly approximated numerically.NMF finds applications in such fields as computer vision, document clustering, chemometrics, audio signal processing and recommender systems.