

Simple Harmonic Motion
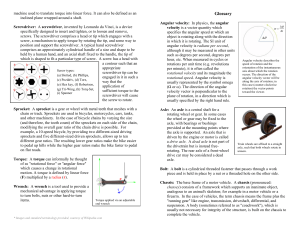
... spring force and acceleration are zero. At maximum displacement, spring force and acceleration is a maximum and velocity is at zero. The negative sign in the equation signifies that the direction of the spring force is always opposite the direction of the mass’s displacement. The term k stands ...
... spring force and acceleration are zero. At maximum displacement, spring force and acceleration is a maximum and velocity is at zero. The negative sign in the equation signifies that the direction of the spring force is always opposite the direction of the mass’s displacement. The term k stands ...




Newtonian Mechanics - University of Iowa Physics
... Next I use the concept of inertial mass to decompose the acceleration function into a part that depends on the particle and a part that is independent of the particle. If I consider two different point particles connected to identical springs, the two point particles will experience different accele ...
... Next I use the concept of inertial mass to decompose the acceleration function into a part that depends on the particle and a part that is independent of the particle. If I consider two different point particles connected to identical springs, the two point particles will experience different accele ...



Equations of Motion
... If the dragster is traveling with a known velocity and the magnitude of the opposing drag force at any instant is given as a function of velocity, can we determine the time and distance required for dragster to come to a stop if its engine is shut off? How ? ...
... If the dragster is traveling with a known velocity and the magnitude of the opposing drag force at any instant is given as a function of velocity, can we determine the time and distance required for dragster to come to a stop if its engine is shut off? How ? ...

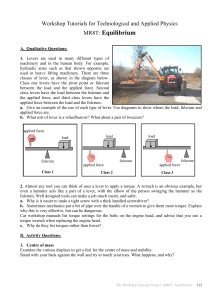
Static Equilibrium - University of Colorado Boulder
... Torque is always computed with respect to some axis or pivot point. If the object is not moving at all, we can pick any point as the axis. We can always pretend that the object is about to rotate about that point. Let us choose the right end of the bar as our pivot point. Then the tension force does ...
... Torque is always computed with respect to some axis or pivot point. If the object is not moving at all, we can pick any point as the axis. We can always pretend that the object is about to rotate about that point. Let us choose the right end of the bar as our pivot point. Then the tension force does ...