






Math 1300 Geometry review and extension exercises
... This is an extra review sheet. These exercises test your basic skill with vectors, linear systems and geometry and in a few places to use common sense with vectors. Some hints may be found at the end. 1. Determine whether the system has a unique solution, no solution, or infinitely many solutions by ...
... This is an extra review sheet. These exercises test your basic skill with vectors, linear systems and geometry and in a few places to use common sense with vectors. Some hints may be found at the end. 1. Determine whether the system has a unique solution, no solution, or infinitely many solutions by ...


Chapter 4 Crossings: few and many
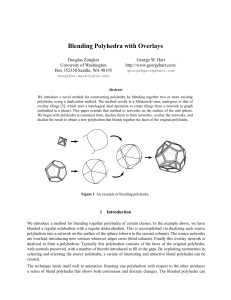
... one unit down, and reflect this lower part over the y-axis. Then in the empty strip between the lines y = 0 and y = −1, reconnect the severed edges by straight-line segments (the ith end from the left on the x-axis with the ith end from the right on the line y = −1), and remove all self-crossings th ...
... one unit down, and reflect this lower part over the y-axis. Then in the empty strip between the lines y = 0 and y = −1, reconnect the severed edges by straight-line segments (the ith end from the left on the x-axis with the ith end from the right on the line y = −1), and remove all self-crossings th ...


Geometry of Surfaces
... 360◦ the Gauss number of P , and V − E + F the Euler number of P . The Gauss number characterizes geometry of P while the Euler number characterizes the combinatorics of P . The theorem says that for every polyhedron P , The Gauss Number of P = The Euler Number of P . Thus combinatorics of a polyhed ...
... 360◦ the Gauss number of P , and V − E + F the Euler number of P . The Gauss number characterizes geometry of P while the Euler number characterizes the combinatorics of P . The theorem says that for every polyhedron P , The Gauss Number of P = The Euler Number of P . Thus combinatorics of a polyhed ...

Exam 1 Study Guide - Math
... 8. Give the best name for the 3-D shapes represented by the following pictures. Angles that look like right angles are right angles in the 3-D shape. ...
... 8. Give the best name for the 3-D shapes represented by the following pictures. Angles that look like right angles are right angles in the 3-D shape. ...


Platonic Solids - hrsbstaff.ednet.ns.ca
... And that makes five regular polyhedra. What about the regular hexagon, that is, the sixsided figure? Well, its interior angles are 120°, so if we fit three of them together at a vertex the angles sum to precisely 360°, and therefore they lie flat, just like four squares (or six equilateral triangles ...
... And that makes five regular polyhedra. What about the regular hexagon, that is, the sixsided figure? Well, its interior angles are 120°, so if we fit three of them together at a vertex the angles sum to precisely 360°, and therefore they lie flat, just like four squares (or six equilateral triangles ...





Algebra I Vocabulary
... A replacement for the variable(s) in an open sentence that results in a true sentence. A method for solving a system of equations that uses substitution of one equation into the other equation to solve for the other variable. A set of equation (two or more) with the same variables. ...
... A replacement for the variable(s) in an open sentence that results in a true sentence. A method for solving a system of equations that uses substitution of one equation into the other equation to solve for the other variable. A set of equation (two or more) with the same variables. ...


DEFINITIONS and GLOSSARY • Graph paper: paper
... Naught (or nought, pronounced as “not”): the British word for "zero”. It is often used to indicate 0 subscripts, so would be spoken as " naught." ...
... Naught (or nought, pronounced as “not”): the British word for "zero”. It is often used to indicate 0 subscripts, so would be spoken as " naught." ...

Steinitz's theorem

In polyhedral combinatorics, a branch of mathematics, Steinitz's theorem is a characterization of the undirected graphs formed by the edges and vertices of three-dimensional convex polyhedra: they are exactly the (simple) 3-vertex-connected planar graphs (with at least four vertices). That is, every convex polyhedron forms a 3-connected planar graph, and every 3-connected planar graph can be represented as the graph of a convex polyhedron. For this reason, the 3-connected planar graphs are also known as polyhedral graphs. Steinitz's theorem is named after Ernst Steinitz, who submitted its first proof for publication in 1916. Branko Grünbaum has called this theorem “the most important and deepest known result on 3-polytopes.”The name ""Steinitz's theorem"" has also been applied to other results of Steinitz: the Steinitz exchange lemma implying that each basis of a vector space has the same number of vectors, the theorem that if the convex hull of a point set contains a unit sphere, then the convex hull of a finite subset of the point contains a smaller concentric sphere, and Steinitz's vectorial generalization of the Riemann series theorem on the rearrangements of conditionally convergent series.↑ ↑ 2.0 2.1 ↑ ↑ ↑ ↑ ↑ ↑ ↑ ↑