



ω ω α θ θ ω ω θ θ ω α ω ω α θ ω ω α θ ω ω α θ π π θ ω
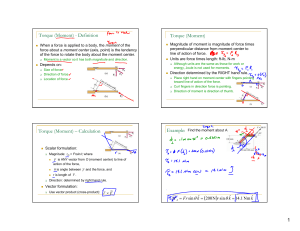
... get the longest moment arm which is equal to the wrench length. If you apply force in any other direction, your moment arm will be less than the wrench length. moment arm = length * sin (angle between force and the wrench). τ = rmax * Fmin Fmin = τ/ rmax = 13.8/0.256 = 53.9 (N), Remember to convert ...
... get the longest moment arm which is equal to the wrench length. If you apply force in any other direction, your moment arm will be less than the wrench length. moment arm = length * sin (angle between force and the wrench). τ = rmax * Fmin Fmin = τ/ rmax = 13.8/0.256 = 53.9 (N), Remember to convert ...
![1.[12 pts] A figure skater is spinning with an angular velocity of +15](http://s1.studyres.com/store/data/017172838_1-3a9cad339920c851c005a2a4ec9a91cf-300x300.png)


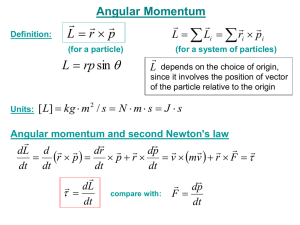
Rotation of Rigid Bodies - wbm
... on the rim of a large disk that is rotating at 0.50 rev/s about an axis through its center. The disk has mass 110 kg and a radius of 4.0 m. Calculate the magnitude of the total angular momentum of the woman-plus-disk system. You can treat the woman as a ...
... on the rim of a large disk that is rotating at 0.50 rev/s about an axis through its center. The disk has mass 110 kg and a radius of 4.0 m. Calculate the magnitude of the total angular momentum of the woman-plus-disk system. You can treat the woman as a ...

sample-midterm-sol
... 1-Three chains act on the bracket such that they create a resultant force having a magnitude of 520 lb. If two of the chains are subjected to known forces, as shown, determine the angle θ of the third chain measured clockwise from the positive x axis, so that the magnitude of force F in this chain i ...
... 1-Three chains act on the bracket such that they create a resultant force having a magnitude of 520 lb. If two of the chains are subjected to known forces, as shown, determine the angle θ of the third chain measured clockwise from the positive x axis, so that the magnitude of force F in this chain i ...





lecture22
... of work done on this system. If we equate this with the rotational energy of the flywheel, then we can discover how fast it is turning. ...
... of work done on this system. If we equate this with the rotational energy of the flywheel, then we can discover how fast it is turning. ...


Torque, Atwood Machines, Angular M.
... unscrew a bolt without a wrench? Maybe but it isn't easy. That extra distance AWAY from the point of rotation gives you the extra leverage you need. THUS we call this distance the LEVER (EFFORT) ARM (r) . ...
... unscrew a bolt without a wrench? Maybe but it isn't easy. That extra distance AWAY from the point of rotation gives you the extra leverage you need. THUS we call this distance the LEVER (EFFORT) ARM (r) . ...


Kinetics: Work, Energy and Power 193 8.6 Spatial (3D) Mechanical
... where q and w are the 3D angular displacement and angular velocities of the rigid body, respectively. Note, even though angular displacement is not a vector, q, represents the angular displacement of the body about each axis. In other words, qx, represents the amount of rotation about the X axis. Th ...
... where q and w are the 3D angular displacement and angular velocities of the rigid body, respectively. Note, even though angular displacement is not a vector, q, represents the angular displacement of the body about each axis. In other words, qx, represents the amount of rotation about the X axis. Th ...

PHYS 201 Equations Sheet
... c. The moment of inertia is greater when the hands are placed behind the head instead on the stomach. d. The moment of inertia is smaller when the hands are placed behind the head instead on the stomach. ...
... c. The moment of inertia is greater when the hands are placed behind the head instead on the stomach. d. The moment of inertia is smaller when the hands are placed behind the head instead on the stomach. ...


