Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
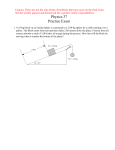
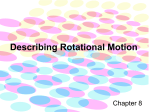
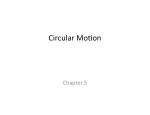
NAME SCORE 1.[12 pts] A figure skater is spinning with an angular velocity of +15 rad/s. She then comes to a stop over a brief period of time. During this time, her angular displacement is +6.2 rad. (a) Determine her average angular acceleration. (b) Determine the time during which she comes to rest. (a) Using a rotational kinematic relation ω 2 − ω02 = 2α(θ − θ0 ), α= ω 2 − ω02 −(15)2 = = −18.1 rad/s2 2(θ − θ0 ) 2 × 6.2 ANS: -18 rad/s2 (b) Using another rotational kinematic relation ω = ω0 + α(t − t0 ), t= ω − ω0 −15 = = 0.827s α −18.1 ANS: 0.83 s 1 Figure 2 5. [16 pts.] A man holds a 165-N ball in his hand with the forearm horizontal (See Figure). He can support the ball in this position because of the flexor muscle force M, which is applied perpendicular to the forearm. The forearm weighs 24.0 N and has a center of gravity as indicated. (a) Find the magnitude of M. (b) Find the magnitude of the force applied by the upper arm bone to the forearm at the elbow joint. (a) Let the elbow joint the axis of rotation. Lever arms for M , the weight of the arm Wa , and the weight of the ball Wb are: ℓM = 0.051 m, ℓa = 0.140 m, ℓb = 0.330 and the net torque is τnet = M ℓM − Wa ℓa − Wb ℓb . Since the system is in equilibrium, τnet = 0. Solving it for M , M= Wa ℓa + Wb ℓb = 1133 N ℓM ANS: 1.1 × 103 N (b) Let Px and Py be x and y component of the force exerted on the elbow joint by the upper arm bone. The components of net force are Fx = Px , Fy = Py + M − Wa − Wb Since the arm is in equilibrium, F~met = 0. Hence, Px = 0, Py = Wa + Wb − M = −944 N ANS: 9.4 × 102 N 2 6 [16 pts.] A 3.9-m long pole is attached to a building by a bracket mounted to the side of the building. The other end of the pole is suspended by a horizontal wire as shown in Figure. The pole has mass m = 28 kg. The bracket holds the pole at an angle of θ = 32◦ . above the horizontal. (a) Find the tension in the wire. (b) Find the magnitude of the force exerted by the bracket. Let W and T be the weight of the pole and the tension in the wire. The lever arms for W and T are LW = L cos θ = 1.654 m, 2 LT = L sin θ = 2.067 m and the net torque is τnet = T LT − W LW Since the system is rotationally in equilibrium, τnet = 0. Solving it for T , T = W LW = 219 N LT 220 N (b) Let Px and Py be the x and y components of the force exerted on the bracket. (Fnet )x = Px − T, (Fnet )y = Py − mg Since the system is translationally in equilibrium, F~net = 0. Hence, Px = T = 219 N and Py = mg = 274 N . The mangitude of P~ is q P = Px2 + Py2 = 351 N 350 N 3 7. [16 pts] A cylinder is rotating about an axis that passes through the center of each circular end piece. The cylinder has a radius of R = 0.0650 m, an angular speed of ω = 88.0 rad/s, and a moment of inertia of I = 0.950 kgm2 . A brake shoe presses against the surface of the cylinder and applies a tangential frictional force to it. The frictional force reduces the angular speed of the cylinder by a factor of two during a time of t = 6.20 s. (a) Find the magnitude of the angular deceleration of the cylinder. (b) Find the magnitude of the force of friction applied by the brake shoe. (a) The final angular velocity is ωf = 44.0 rad/s. Hence, α= ωf − ω 44.0 − 88.0 = = −7.097 rad/s2 t 6.2 7.10 rad/s2 (b) From the Newton’s equation for rotational motion τ = Iα. On the other hand, τ = FT R where FT is th tangential frictional force. Hence, FT R = Iα. Solving for FT , FT = Iα = −103.7 N R 104 N 4