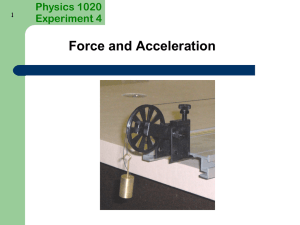
4. Work-Energy
... The net work done on the glider will be calculated from the net force acting on the glider and the distance it moved between the two positions. II. THEORY Work Done by a Constant Force Consider an air track glider of mass M connected to a hanging mass m by a string which goes over a smooth pulley at ...
... The net work done on the glider will be calculated from the net force acting on the glider and the distance it moved between the two positions. II. THEORY Work Done by a Constant Force Consider an air track glider of mass M connected to a hanging mass m by a string which goes over a smooth pulley at ...





Accelerated Physics Simple Harmonic Motion Lab Answer Sheets
... objects and try again. You might want to try sticking a small index card to the bottom of the mass or change the distance between the mass and the motion detector if the graph persists on being jagged. Print when you have a good graph. Make sure it has an appropriate title and your name(s) are on it ...
... objects and try again. You might want to try sticking a small index card to the bottom of the mass or change the distance between the mass and the motion detector if the graph persists on being jagged. Print when you have a good graph. Make sure it has an appropriate title and your name(s) are on it ...

Chapter 2
... Extra work can show that for this example, k = 0.472 *8-13. For the example described in Problem 8-12, what is the coefficient of friction between the toolbox and the floor. (Refer to figure and information given in previous problem.) Fy = 0; N + (60 N) sin 350 – (10 kg)(9.8 m/s2) = 0 ; and N = 6 ...
... Extra work can show that for this example, k = 0.472 *8-13. For the example described in Problem 8-12, what is the coefficient of friction between the toolbox and the floor. (Refer to figure and information given in previous problem.) Fy = 0; N + (60 N) sin 350 – (10 kg)(9.8 m/s2) = 0 ; and N = 6 ...





Force - DCS Physics
... A braking force of 1000N is applied by a driver to stop his car. The car covered 50m before it stopped. How much work did the brakes do? Work Done = force x distance = 1000x50 = 50000J What is the kinetic energy of a 100g tennis ball being thrown at a speed of 5m/s? Using KE=½mv2=0.5x0.1x5x5=1.25J A ...
... A braking force of 1000N is applied by a driver to stop his car. The car covered 50m before it stopped. How much work did the brakes do? Work Done = force x distance = 1000x50 = 50000J What is the kinetic energy of a 100g tennis ball being thrown at a speed of 5m/s? Using KE=½mv2=0.5x0.1x5x5=1.25J A ...


Chapter 7 – Kinetic energy, potential energy, work
... 54. In the figure (a) below a 2N force is applied to a 4kg block at a downward angle θ as the block moves rightward through 1m across a frictionless floor. Find an expression for the speed vf at the end of that distance if the block’s initial velocity is: (a) 0 and (b) 1m/s to the right. (c) The si ...
... 54. In the figure (a) below a 2N force is applied to a 4kg block at a downward angle θ as the block moves rightward through 1m across a frictionless floor. Find an expression for the speed vf at the end of that distance if the block’s initial velocity is: (a) 0 and (b) 1m/s to the right. (c) The si ...