Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Variable-frequency drive wikipedia , lookup
Routhian mechanics wikipedia , lookup
Specific impulse wikipedia , lookup
Modified Newtonian dynamics wikipedia , lookup
Fictitious force wikipedia , lookup
Center of mass wikipedia , lookup
Classical mechanics wikipedia , lookup
Symmetry in quantum mechanics wikipedia , lookup
Laplace–Runge–Lenz vector wikipedia , lookup
Jerk (physics) wikipedia , lookup
Old quantum theory wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Equations of motion wikipedia , lookup
Hunting oscillation wikipedia , lookup
Tensor operator wikipedia , lookup
Mass versus weight wikipedia , lookup
Centripetal force wikipedia , lookup
Work (physics) wikipedia , lookup
Relativistic mechanics wikipedia , lookup
Photon polarization wikipedia , lookup
Moment of inertia wikipedia , lookup
Theoretical and experimental justification for the Schrödinger equation wikipedia , lookup
Classical central-force problem wikipedia , lookup
Newton's laws of motion wikipedia , lookup
Accretion disk wikipedia , lookup
Rotational spectroscopy wikipedia , lookup
Angular momentum wikipedia , lookup
Angular momentum operator wikipedia , lookup
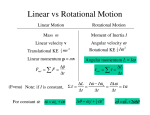
The center of gravity of an object is the point at which its weight can be considered to be located. xcg = (W1x1 + W2x2 + . . .)/ (W1 + W2 . . .) For ordinary-sized objects, the center of mass is the same as the center of gravity. (If the object is large enough such that “g” is different at different parts of the object, the center of gravity and the center of mass will NOT be the same.) F = ma FT = maT and Ƭ = FT r, so Ƭ = maT r Ƭ = maT r and aT = ra Thus Ƭ = m ra r or Ƭ= 2 mr a. 2 mr a Ƭ= The net external torque Ƭ is directly proportional to the angular acceleration a. The constant of proportionality 2 is I = mr , the moment of 2 inertia. (Si unit kgm .) The moment of inertia depends on the location and orientation of the axis relative to the particles that make up the object. There are different formulas for moment of inertia. The moment of inertia depends on the shape of the object, the distribution of the mass in the object, and the location of the pivot point. Newton’s second law for a rigid body rotating about a fixed axis. Torque = moment of inertia X angular acceleration Ƭ=Ia (a must be in rad/s2) Example 9: The motor of a saw brings the circular blade up to an angular speed of 80.0 rev/s in 240.0 revs. The blade has a -3 moment of inertia of 1.41 x 10 kg m2. What net torque must the motor apply to the blade? Example 11. A crate that weighs 4420 N is being lifted by the mechanism in Fig 9.19a. The two cables are wrapped around their pulleys, which have radii of 0.600 and 0.200 m. The pulleys form a dual pulley and have a moment of inertia of I = 50.0 kg m2. The tension in the motor cable is maintained at 2150 N. Find the angular acceleration of the dual pulley and the tension in the cable attached to the crate. Rotational work and energy can also be calculated. Work is equal to force times displacement, W = Fx. Angular displacement q is equal to linear displacement/radius, x/r. So x = rq. Thus W = Fx becomes W = Frq. Since Fr is equal to torque Ƭ, rotational work is equal to torque multiplied by angular displacement. WR = Ƭq (q must be in radians and the work unit is the joule J.) 2 mv . Kinetic energy is ½ In rotation vT = rw. So 2 rotational KE = ½ m(rw) 2 2 KE = ½ mr w . 2 mr is moment of inertia, so 2 KE = ½ I w Rotational KE = ½ I 2 w (w = must be in rad/s and the unit is the joule J.) Total kinetic energy is not just 2 ½ mv , but 2 2 ½ mv + ½ I w . Example 12. A thin-walled hollow cylinder (mass = mh, radius = rh) and a solid cylinder (ms, rs) start from rest at the top of an incline. Both start at the same vertical height h0. Ignoring friction energy loss, which cylinder has the greatest translational speed at the bottom. The rotational analog to displacement is angular displacement q, the rotational analog to velocity is angular velocity w. For acceleration it is angular acceleration a. For work it is rotational work Ƭq. The rotational analog to kinetic energy is rotational kinetic energy ½ I w2 and the rotational analog to momentum is angular momentum. The formula for momentum is p = mv. In angular momentum m is replaced with moment of inertia I, and velocity is replaced with angular velocity w. Angular momentum L = I w. L=Iw w must be in rad/s and 2 I must be in kgm . 2 L is in kgm /s If the net force on an object is zero, the momentum remains constant. Law of Conservation of Momentum. Similarly, If the net torque on an object is zero, the angular momentum remains constant. Law of Conservation of Angular Momentum. Example 13. An ice skater is spinning with both arms and one leg outstretched. She then pulls she arm and leg inward. Using the principle of conservation of angular momentum, explain the change in her spinning motion. Example 14. A satellite in an elliptical orbit around the 6 earth is rP = 8.37 x 10 m from the earth at perigee, and 6 rA = 25.1 x 10 m from the earth at apogee. The speed at perigee is vP = 8450 m/s. What is the speed at apogee vA? Example 15. A square crate has a uniformly distributed weight of 580 N. An obstruction in the floor keeps it from sliding when pushed, but a great enough force could cause it to tip over. What minimum horizontal force is needed to tip it over and where should that force be applied? Example 16. Two spheres are each rotating at an angular speed of 24 rad/s about axes that pass through their centers. Each has a radius of 0.20 m and a mass of 1.5 kg. One is solid and the other is a thin-walled spherical shell. A frictional torque of 0.12 Nm is applied to the edge of each sphere by friction. How long does it take each sphere to stop?