Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
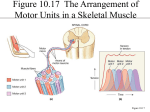
Biomechanics Length-Tension Relationships The most basic relationship governing muscle performance is often said to be the association between the length of the muscle and the corresponding tension it produces. The easiest way to understand this is to think of an isometric contraction. If we started with a muscle in a loose position the tension of that muscle could be recorded using a dynamometer. As the muscle is slowly lengthened a point would be reached where passive resistance is recorded. The muscle would continue to be lengthened until no increase in tension was apparent. Two independent sources of resistance could then be identified. The active tension produced by the contractile elements. The passive tension produced by the non-contractile elements. The muscle tension corresponding to the maximal active tension is known as the resting length (physiotherapists often confuse this length with the anatomical position). Gordon et al. (1996) stated that the length-tension relationship of the whole muscle reflects the mechanical behavior of the individual fibers which can be related to the number of cross bridges between the actin and myosin filaments in the fibers (or the degree of overlap). Real World Strength No matter what techniques we use (either isometric, isokinetic or other) to measure strength (not to be confused with force as this is a linear entity) we actually look at the rotational effect generated by the force of a muscle or muscle group. So, in other words, we actually infer the force generated by the muscles rather than record it. Gravitational Correction Since the majority of isokinetic tests consist of angular motions e.g. plantar and dorsiflexion of the ankle, the effects of gravity must be corrected for. However, in some movements e.g. inversion and eversion of the ankle, gravity does not have to be corrected for even though the motion is angular. This is extremely important when considering the agonist/antagonist strength ratio. Consider it like this. The weight of the lower leg has to be overcome by the quadriceps to extend the knee in the sitting position, yet when the knee is flexed by the hamstrings the weight of the leg actually assists the movement. So gravity correction becomes important for reliable results. Force-Velocity Relationship There is a direct relationship between the amount of force generated and velocity in that:For concentric contractions there is a parallel decrease in the maximal moment developed by the muscles as speed increases. This is because of neuromuscular recruitment patterns i.e. both type I and II fibers are activated together at lower speeds but as speed increases less type I fibers are recruited and eventually become inactive. At very high velocities smaller and smaller fiber populations are recruited (Kannus 1994). For eccentric contractions the maximal moment may rise initially but at higher velocities it plateaus due mainly to neuromuscular facilitation (as eccentric contractions could be theoretically very high at speed Perrin 1993). Order of Strength The principles mentioned above are supplemented by:At the same velocity eccentric strength is greater than concentric strength. Elftman’s (1966) principle states that the order of strength is dependent on contraction mode i.e. eccentric > isometric > concentric. These are also dependent on the type of exercise performed i.e. isokinetic > isometric> isotonic A further expansion of these principles can be seen here. Order of Joint Forces When a muscle is contracted around a joint a certain amount of pressure is created within that joint. That pressure is dependent on the type of exercise and type of contraction i.e. isotonic> isokinetic> isometric and eccentric> concentric> isometric. A further expansion of these principles can be seen here. Test Velocities For concentric contractions most dynamometers have a maximum speed of 500 degrees per second. The use of velocities is dependent on the joint tested and the ROM, however, higher velocities are usually only of academic interest. Corresponding eccentric velocities are not usually possible and are generally one-third less than concentric. Stretching an active muscle at high velocity poses a serious threat to muscle integrity (so don’t do it). Restraint of antagonist activation (or in other words when the antagonist muscles activate to prevent hyper extension) is a neuromuscular phenomenon that is well developed in athletes (Glossman et al. 1988). This is not so well developed in untrained athletes who may find high velocities very difficult. Increased Eccentric Contraction Theoretically the eccentric strength could exceed the isometric strength (never mind the concentric strength) by about 100% (Edman et al. 1979). However, in real life this never happens. The best explanation for this phenomenon suggests a negative feedback loop which involves peripheral and spinal regulation in order to avoid excessive stresses on the muscle (Storber, 1989). The only time this feedback loop can be over-ridden is when the CNS determines that increased eccentric contraction is needed for defensive purposes. When this happens there is usually damage to the musculo-tendinous junction rather than the muscle. The Eccentric/Concentric (EC) Ratio This is expressed as the maximal eccentric moment divided by the maximal concentric moment. Since this is dependent on velocity it should increase proportionally with this. It has been proposed that with respect to single joint testing (Dvir, 1994) the EC value derived from low to medium test velocities is very likely to be within the range of 0.95 : 2.05. Trudelle-Jackson et al. (1989) proposed that the EC ratio at slower speeds is less than 0.85. This ratio tends to fall particularly in the presence of pathology (Conway et al. 1992). Bennett and Storber (1986) have suggested that a particularly low EC ratio (less than 0.85) is a potential source of patella-femoral pain (based on an error in neuromotor control). If there is a large increase in the EC ratio then excessive connective tissue components may be the reason. As described by Dvir and Dagan (1994) this may be due to a rare form of hereditary anemia which should be eliminated before continuing with isokinetics. Closed versus Open Chains Most isokinetic machines are configured for assessing planar, single joint motion. However, in most instances joint motion is multi planar and often combined harmoniously with other joints. Although moment output may not be measurable from the individual contributions of the muscles responsible for executing multi joint motion, their use is of considerable interest. A lot of debate rages over the use of closed chain and open chain exercises. It is true that there are high joint loading forces during most isokinetic movements. Obviously if a load is to be moved it must be supported by structures around the joint. As most muscles have very short levers only a small percentage of the muscle force is used to counteract the external load. The rest is transmitted through the joint articular surface or taken up by anatomical structures such as the ligaments and capsule. It should be emphasized that the forces seen during isokinetics are not the largest the joint will be expected to support. The following are several examples of forces:Kaufman et al (1991) indicated average tibio-femoral force of 4 times body weight whilst testing isokinetically. This is equal to that obtained during walking. The anterior shear force was on average 0.3 times body weight which is higher than that expected during walking but lower than that expected during stair climbing (1.7 x body weight) or running (3 x body weight). Posterior shear force was on average 1.7 times body weight which is larger than walking but on a par with stair climbing and lower than running. Patella-femoral forces reaching 5.1 times body weight at 60 degrees/second were calculated. This can be compared to 0.5 times body weight during walking, 3.3 times body weight whilst ascending stairs, 7.6 times body weight in the squat or 20 times body weight during jumping. Eccentric-Concentric Coupling This phenomenon of concentric contraction potentiation following eccentric contraction is well established (Cavanagh et al 1968, Komi and Bosco, 1978/1979, Bosco et al., 1987). This phenomenon is also termed as prestretching, stretch shortening cycle or plyometric contraction. It is based primarily on the mechanical behavior of the series elastic element found in contractile elements and tendons within the muscle (Svantesson et al. 1991). Basically in eccentric contractions energy is accumulated in both mechanical and chemical forms and is released at the beginning of the next concentric contraction. This is relevant to isokinetic testing as the plyometric response can be trained for. Affecting an increase in plyometric contraction using isokinetics is more controversial.