Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Tissue engineering wikipedia , lookup
Endomembrane system wikipedia , lookup
Cell encapsulation wikipedia , lookup
Programmed cell death wikipedia , lookup
Extracellular matrix wikipedia , lookup
Cellular differentiation wikipedia , lookup
Cell growth wikipedia , lookup
Cell culture wikipedia , lookup
Cytokinesis wikipedia , lookup
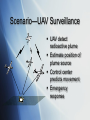
The Cat and The Mouse -The Case of Mobile Sensors and Targets David K. Y. Yau Lab for Advanced Network Systems Dept of Computer Science Purdue University (Joint work with J. C. Chin, Y. Dong, and W. K. Hon) Project Background Sensor-cyber project in national defense Near real-time detection, tracking, and analysis of plumes (nuclear, chemical, biological, …) Multi-university partnership funded by Oak Ridge National Lab Sensor testbed design and implementation Research team: Purdue, UIUC, LSU, U of Florida, Syracuse Personel Purdue: Jren-Chit Chin, Yu Dong, David Yau, Wing-Kai Hon Oak Ridge National Lab: Nageswara Rao Partnership with SensorNet initiative SensorNet Initiative Building comprehensive incident management system Coordinate knowledge and response effectively Provide data highway for processing sensor data Deliver near-real-time information for effective counter-measure Analysis, modeling and prediction Biological Radiation Chemical Why Mobile? The mouse Evasion of detection Nature of “mission” The cat Improved coverage with fewer sensors Robustness against contingencies Planned or random movement (randomness useful) Scenario—UAV Surveillance UAV detect radioactive plume Estimate position of plume source Control center predicts movement Emergency response Mobility Model Four-tuple <N, M, T, R> N: network area M: accessibility constraints -- the “map” T: trip selection R: route selection Random waypoint model is a special case Null accessibility constraints Uniform random trip selection Cartesian straight line route selection Problem Formulation Two player game Payoff is time until detection (zero sum) Cat plays detection strategy Stochastic, characterized by per-cell presence probabilities Mouse plays evasion strategy Knows statistical process of cat’s movement, but not necessarily exact routes (exact positions at given times) Best Mouse Play Cat’s presence matrix given Network region divided into 2D cells Pi,j gives probability for mouse to find cat in cell (i, j) Expected detection time “long” compared with trip from point A to point B Dynamic programming solution to maximize detection time Local greedy strategy does not always work Optimal Escape Path Formulation For each cell j, mouse decides whether to stay or to move to a neighbor cell (and which one) If stay, expected max time until detection is Ej[Tstay] If move to neighbor cell k, expected max time until detection is Ej[Tmove(k)] For cell j, expected max time until detection, Ej[T], is largest of Ej[Tstay] and Ej[Tmove(k)] for each neighbor cell k of j Ej[Tstay] determined by cat’s presence matrix and expected cat’s sojourn time in each cell Optimal escape path is sequence of safest neighbors to move to, until mouse decides to stay How to compute Ej[T] for each cell j? Computing Ej[T] Initialize Ej[T] as Ej[Tstay] Insert all the cells into heap sorted by decreasing Ej[T] Delete root cell 0 from heap For each neighbor cell k of 0, update Ek[T] as Ek[T] := max(Ek[T], Ek[Tmove(0)]) Reorder heap in decreasing Ej[T] order Repeat until heap becomes empty Example Optimal Paths 0.007 0.009 0.01 0.009 0.007 0.009 0.05 0.1 0.05 0.009 0.01 0.1 0.08 0.1 0.01 0.009 0.05 0.1 0.05 0.009 0.0075 0.009 0.01 0.009 0.0075 Path when mouse moves slowly Path when mouse moves quickly Comparison with Local Greedy Strategy 0.0075 0.0075 0.0075 0.0075 0.0075 0.0075 0.1 0.1 0.1 0.0075 0.0075 0.1 0.08 0.1 0.0075 0.0075 0.1 0.1 0.1 0.0075 0.0075 0.0075 0.0075 0.0075 0.0075 Current mouse position • Local greedy strategy: mouse will stay • Dynamic programming strategy: mouse moves to cell with small probability of cat’s presence (0.0075) If Cat Plays Random Waypoint Strategy Highest presence probability at the center of the network area Lowest presence probabilities at the corners and perimeters Good “safe havens” for mouse to hide Sum of presence probabilities is one n cats sum of probabilities n Equality for disjoint cats’ surveillance areas Distribution of Movement Direction in 150 m by 150 m Network Area Cat’s Presence Matrix in 500500 m Network for Random Waypoint Movement Distribution of Movement Direction (a) Calculated probabilities of sensor moving towards the center cell from different current cells (b) Measured probabilities of sensor moving towards the center cell from different current cells Analytical Cell Coverage Statistics (a) Expected number of trips before covering a cell (average = 11.431, maximum = 18.667) (b) Expected time before covering a cell (average = 59.604 s, maximum = 97.353 s) Measured Cell Coverage Statistics (b) Expected number of trips before covering a cell (average = 10.301, maximum = 20.482) (b) Expected time before covering a cell (average = 52.721 s, maximum = 105.169 s) Optimal Cat Strategy Maximize minimum presence probability among all the cells Eliminate safe haven Achieved by equal presence probabilities in each cell Will lead to Nash Equilibrium Zero sum game Pareto optimality Presence Matrices Random Waypoint Model Bouncing Seeing Mouse Strategy Blind Mouse Strategies Compared Average Detection Time DP Mouse RWP Strategies Stay Cat Strategies Scan 1083.26 Bouncing RWP 628.66 2823.26 415.31 442.23 271.73 511.50 305.03 226.13 Vc = 10 m/s, Vm = 10 m/s, Rc = 25 m, Rm = 0 m Seeing Mouse Strategies Compared Average Detection Time Bouncing Centric Mouse Strategies Static Stay Cat Strategies Bouncing RWP 149.53 1455.28 340.85 1092.29 92.39 899.07 10.23 21.99 Vc = 10 m/s, Vm = 10 m/s, Rc = 5 m, Rm = 10 m Effect of Mouse Sensing Range Effect of Mouse Speed Effect of Number of Cats Minimum Sensing Range for Expected Random Waypoint Coverage Stationary mouse; cat in random waypoint movement Expected coverage desired by given deadline What is minimum sensing distance required? Stochastic analysis of shortest distance between cat and mouse within deadline Lower Bound Cat-mouse Distance • Network divided into m by n cells; each has fixed size s by s • D(i, j): Euclidean distance between cell i and cell j • N sets of cells sorted by set’s distance to mouse • Each set of cells denoted as Sj, 0 ≤ j ≤ N - 1 • Each cell in Sj is equidistant from the mouse; distance is DSj • Distances sorted in increasing order; i.e., DSj < DSj+1 Example Equidistant Sets of Cells Mouse located at center of network area Correlation between Cells Visited • Pi: probability that cat may visit cell i • PSj: probability that cat may visit any cell in set Sj PS j P lS j l Shortest Distance Probability Matrix from Cell i to Cell j 3-D probability matrix B b0,0 B bi ,0 b mn1,0 b0, j bi , j bmn1, j b0,mn1 bi ,mn1 bmn1,mn1 Each element bi,j • gives cat’s shortest distance distribution from mouse after trip from cell i to j • is a size N vector: bi,j[k] is the probability that the shortest distance during the trip is DS k Shortest Distance Probability Matrix after l Trips • • Bl is the shortest distance probability matrix after l trips Computed by * operator Bl Bl 1 B • Each element of Bl is calculated as: 1 mn1 l 1 b bi , x * bx , j mn x 0 l i, j • Let l l b(i , j )' x denote bil,x1 bx, j, then b(i , j )' x is calculated as: l 1 b(li , j )' x [0] 1 (1 bi , x [0])(1 bx , j [0]); n l ( i , j )' x b n n 1 k 0 k 0 [n] 1 (1 b [k ])(1 bx , j [k ]) b(li , j )' x [k ],1 n N 1 k 0 l ( i , j )' x l 1 i,x [0] is the probability that DS is shortest distance for trip l, where b 0 l and b(i , j )' [n] is probability that DSn is shortest distance for the trip, 1 ≤ n ≤ N - 1 x Expected shortest distance The expected shortest distance between cat and mouse after l trips: mn1 mn1 N 1 1 l l E[d min ] D b [ k ] S i , j k mn i 0 mn j 0 k 0 Approximate Expected Shortest Distance Approximate expected shortest distance from mouse after cat has visited k cells: N 1 E[d min (k )] PD j (k ) DS j j 0 PDj(k) is probability that after visiting k cells, a cell in Sj is visited, but no cell in Si, i< j, is visited Lower Bound Cat-mouse Distance for Random Waypoint Model (a) Expected speed = 5 m/s (b) Expected speed = 10 m/s (c) Expected speed = 25 m/s Lower Bound Cat-mouse Distance for Indiana Map-based Model Conclusions Considered cat and mouse game between mobile sensors and mobile target For random waypoint model, other coverage properties can be obtained analytically Expected cell sojourn time, expected time to cover general AOI, number of sensors to achieve coverage by given deadline, … Conclusions (cont’d) Many extensions possible Explicit account for plume explosion / dispersion models Model for sensor (un)reliability, interference, etc Explicit quantification of sensing uncertainty and its reduction