Survey
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
* Your assessment is very important for improving the workof artificial intelligence, which forms the content of this project
Neurophilosophy wikipedia , lookup
Cognitive neuroscience of music wikipedia , lookup
Optogenetics wikipedia , lookup
Empirical theory of perception wikipedia , lookup
Neuropsychology wikipedia , lookup
Cognitive neuroscience wikipedia , lookup
Cognitive development wikipedia , lookup
Time perception wikipedia , lookup
Cognitive model wikipedia , lookup
Premovement neuronal activity wikipedia , lookup
Neuroethology wikipedia , lookup
Nervous system network models wikipedia , lookup
Holonomic brain theory wikipedia , lookup
Stephen Grossberg wikipedia , lookup
Eshkol-Wachman movement notation wikipedia , lookup
Recurrent neural network wikipedia , lookup
Embodied cognitive science wikipedia , lookup
Neuroesthetics wikipedia , lookup
Perceptual control theory wikipedia , lookup
Neuropsychopharmacology wikipedia , lookup
Neural correlates of consciousness wikipedia , lookup
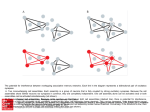
Cortical control of voluntary behavior appears to be organized in a hierarchical series of operations. A. The brain's control of voluntary behavior has often been divided into three main operational stages, in which perception generates an internal neuronal image of the world, cognition analyzes and reflects on this image to decide what to do, and the final decision is relayed to action systems for execution. However, this three-stage serial organization was largely based on introspective psychological studies rather than on direct neurophysiological study of neural mechanisms. B. Each of the three main operational stages is presumed to involve its own serial processes. For example, the "action" stage that converts an intention into a physical movement is often presumedThe to involve hierarchy of operations transform a general plan into progressively more detailed instructions Source: Voluntary Movement: PrimaryaMotor Cortex, Principles that of Neural Science, Fifth Editon about its implementation. The model shown here, inspired by early controller designs for multijoint robots, suggests that the brain plans a chosen reaching Citation: Kandel ER, Schwartz JH, Jessell TM, Siegelbaum SA, Hudspeth AJ, Mack S. Principles of Neural Science, Fifth Editon; 2012 Available movement by first calculating the extrinsic kinematics of the movement (eg, target location, trajectory of hand displacement from the starting location to the at: http://mhmedical.com/ Accessed: June 11, 2017 target location), then calculating the required intrinsic kinematics (eg, joint rotations) and finally the causal kinetics or dynamics of movement (eg, forces, Copyright © 2017 McGraw-Hill Education. All rights reserved torques, and muscle activity). (See also Figure 33–2.)