Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Cornell University
FORCAST
Memo:
TM-FOR99-12
Date:
07-Sep-1999
Subject:
FORCAST Sensitivity vs. SOFIA PSF –
Simulation Analysis
Version:
1.0
Distribution:
FORCAST Team, Sean Casey
Orig. Date:
19-Aug-1999
Author:
Terry Herter
Posted:
07-Sep-1999
This memo calculates the change in FORCAST sensitivity vs. SOFIA guiding errors. The guiding error
ellipse, the optical quality ellipse, and the diffraction pattern of the telescope are convolved to obtain a
Point Spread Function (PSF). A Monte Carlo simulation is then performed. The PSF is sampled with the
instrument array, noise is added, and the flux of the source is extracted by fitting a 2-D gaussian to the simulated data. Iterating numerous times with randomly determined errors gives the flux extraction error for a
given noise amplitude. The relative signal-to-noise ratio (SNR) is then compared for different amplitudes
of the guiding error.
The results are similar to the previous analysis in TM-FOR99-11 in which gaussian beams are assumed for
all component of the PSF and the optimal SNR is derived analytically.
Diffraction Component:
The diffraction pattern for an obscured telescope is given by:
2
2 J (a) 2eJ 1 (ae) 1
I (a, e) 1
1 e 2
a
a
2
(1)
Where
a
Dtel
D
e obscur
Dtel
(2)
a represents the distance off-axis in units of /(Dtel) while e is the fractional linear obscuration.
Optical Quality and Guiding Component:
The optical quality term is given by opt = 0.591” (= d80/2.54), where d80 is the 80% encircled energy
diameter. This gives 80% encircled energy within the diameter d80 = 1.5” as per the SOFIA optical
specifications.
The degraded pointing (guiding ellipse) has an axial ratio of 2:1 so that ge yp = 2xp. Defining
rms1D as the 1-D rms in the y direction, ge = sqrt(2) rms1D, and rms2D = sqrt(5/4) rms1D = 1.12 rms1D.
The gaussian representing these two terms is given by:
b2 x2
y2
G ( x, y ) A exp 2 2
2
2
2
b opt ge
opt
ge
(3)
Where b = yp /xp = 2 for the case considered here.
Point Spread Function (PSF):
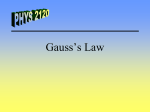
The PSF, the response of the system to a point source, is obtained by convolving I(a,e) and G(x,y). Figure
1 below shows the geometry for doing this convolution. The coordinate system is chosen with I(a,e) centered. The response is evaluated at a position (x,y) off axis with G(x,y) centered at that position (with the
TM-FOR99-12
Page 1
Cornell University
FORCAST
long axis still in the y-axis direction). However this is equivalent to keeping the center of G(x,y) on the xaxis and tipping the gaussian by an angle . We define the angle as the radial distance of G(x,y) from the
center of I(a,e).
y
r
x
Figure 1: Illustration of geometry for convolution of the diffraction disk (centered, solid line)
with gaussian pointing error and optical quality disk. The integration occurs over then r for
a given ).
The coordinates are given by:
x2 y2
tan 1 ( y / x)
(4)
We have then for G(r,)
( r cos ) cos r sin sin 2 b 2
2
2
b 2 opt
ge
G (r , , , ) exp
2
(r cos ) sin r sin cos
2
2
opt ge
(5)
Taking the wavelength to be in microns and the telescope diameter in centimeters, the diffraction limit in
arcseconds is defined as
diff (" ) 1.2
( m) 206265
Dtel (cm) 1000
(6)
We then define a rough width for the final PSF as
TM-FOR99-12
Page 2
Cornell University
FORCAST
2
2
2
d2 ge
opt
diff
(7)
and extend the integration to a distance nd ·d away from the peak. A nominal value of nd = 10 was chosen.
The final PSF is given by
nd d
C ( , ) Ac
0
D
D
r
I tel
, obscur
206265 Dtel
G (r , , , ) r d dr
(8)
Ac is a normalization constant to make the area of C() equal to unity. To operate in (x,y) space we define a function R(x,y) such that
R ( x, y ) C
x 2 y 2 , tan 1 ( y / x)
(9)
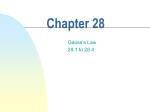
Cuts through the x and y-axes are shown in Figure 2.
100
10
Amplitude
1
0.1
0.01
1 10
1 10
3
4
15
10
5
0
5
10
15
Position (arcsec)
Figure 2: Point spread function in the x (solid line) and y (dotted line, wider profile) for =
d 1.111
5 m and ge = 0.8 arcseconds. The amplitude scale is logarithmic. The dashed line extending off the bottom of the graph shows a gaussian with the same area.
Sampling the PSF (Pixel Sampling):
The signal, S, in a pixel offset from the center by a distance (x0,y0) in arcseconds is obtained by integrating
the point spread function over the pixel area
y0 p x0 p
S ( x0 , y 0 )
R( x, y) dx dy
(10)
y0 p x0 p
TM-FOR99-12
Page 3
Cornell University
FORCAST
where p is the pixel half-width in arcseconds. For FORCAST p = 0.375”. The signal for an offset (a,b) in
pixels is given by
s(a, b) S (2ap,2bp)
(11)
A sample case for S(x0 ,0) = 0 plotted in Figure 3 below shows that, as expected, the finite size of the pixel
smoothes out the profile.
100
10
S(x,0)
1
0.1
0.01
1 10
1 10
3
4
0
2
4
6
8
10
12
x (arcseconds)
Compute
for offset
(a,b) measured
in pixels:in pixel (0.75” across) at distance x from the center of the
Figure flux
3: Signal
(log scale)
point spread function for the case = 5 m and ge = 0.8 arcseconds.
Figure 4 shows a two-dimensional representation of the sampled point spread function for two offsets relative to the center of a pixel.
15
15
10
10
0
5
5
0
5
5
10
0
5
15
10
15
10
0
5
15
10
15
P1
P3
Figure 4: Sampled point source with 0.75” pixels for the case = 5 m and ge = 0.8 arcseconds for the
source centered on a pixel (left figure) and the source centered in the y-direction but at the boundary between
two pixels in the x-direction (right figure).
TM-FOR99-12
Page 4
Cornell University
FORCAST
Monte Carlo Simulations:
Data like those shown in Figure 4 are generated for the source centered at various locations relative to the
center of a pixel. Noise is then added to these data (see Figure 5) and the source extracted by fitting a 2D
gaussian. A number of trials (typically 100-400) are run for each position. The “flux” errors are determined by looking at the standard deviation of the extracted fluxes at each position. In all cases the initial
Figure 5: Sampled PSF without (left) and with (right) noise added. The peak source amplitude is
18.8 while the volume is 100 counts. The noise amplitude has = 2.0 with a peak-to-peak amplitude of about 3.
source flux was taken to be 100 counts. The peak amplitude varied then according to the shape of the PSF.
Noise Model: The internal random noise generator for Delphi (the compiler) was used to give a uniform
noise between 0 and 1. This was offset and scaled appropriately to give the correct noise amplitude about
zero. Empirically it was determined that the peak-to-peak amplitude equals approximately three times the
standard deviation, e.g. p-p = 3. Although there are usually concerns about using vendor supplied random number generators, the present one seems adequate for the current investigation. At some point in the
future the issue will be investigated further using a gaussian error distribution.
Sub-sampling: No sub-sampling of the image data is performed before source extraction. Improvements
to the extraction process can occur, especially for undersampled data, if multiple images are taken at different spatial positions, sub-sampled, registered, and combined. This case will not be investigated here.
PSF determination: The PSF is taken to be gaussian in shape. For each spatial position the “zero noise”
case was fit to determine the FWHM of the gaussian in the x and y directions. These widths were then
used to fit the “noisy” data. Figure 5 shows a comparison of extraction errors using this prior knowledge of
the FWHM versus determining them intrinsically from the data. Obviously intrinsic knowledge of the PSF
is necessary. This could come from bright sources in the image or, if the beam shape is stable, a bright
reference source from other observations. It is imperative that SOFIA have a temporally stable PSF.
Intrinsic Flux Variations: Even for “zero noise” the extracted source flux varies depending on the spatial
location of the source. Figure 6 shows the variations in flux at six spatial locations for = 5 m and ge =
0.8”. The extracted flux varies much more when the PSF is narrow (due to good guiding) due to undersampling of the PSF by the FORCAST pixels. Again, measuring multiple spatial positions and combining
the data would mitigate this problem. In general, the flux is underestimated because the PSF is nongaussian. This factor is not a concern since it is the consistency of the relative flux extraction that counts.
Systematic Flux Errors: At low (< 5) SNR flux estimates are systematically high. This effect is known
(and demonstrated in simulated data for WIRE). However, the typical offset is much smaller than the error
for individual sources. For statistical study using many sources this effect should be taken into account –
but be wary of low SNR data! Figure 8 demonstrates this effect for a set of simulations at = 5 m.
TM-FOR99-12
Page 5
Cornell University
FORCAST
Noise comparison of Fix and Variable Widths
60
PSF Known
PSF Unknown
50
Rel. Flux Error
40
30
20
10
0
0
1
2
3
4
5
6
7
8
9
Noise per pixel
Figure 6: Comparison of flux errors for when the PSF is known and for when it is intrinsically
determined from the data. In the former case the FWHMs in x and y are determined from an “infinite” signal-to-noise source while in the latter case they are fit during source extraction. The
source flux is 100 counts. For this case the source is centered in y and at the boundary of two pixels in x, = 5 m and ge = 0.8”.
Flux Variation at 5um for Zero Noise
99
98
97
RMS-1D
96
1.2
Extracted Flux
1.13
0.99
95
0.85
0.71
0.51
94
0.42
0.28
93
0.14
92
91
90
0
1
2
3
4
5
6
7
8
9
10
Spatial Position
Figure 7: Flux variation vs. spatial position for “zero noise” at = 5 m. The true flux is 100.
The spatial positions 1-9 correspond to offsets of (0,0), (0,0.25), (0,0.5), (0.25,0.25), (0.25,0.5),
(0.5,0.5), (0.25,0), (0.5,0), and (0.5,0.25) from the center in pixels.
TM-FOR99-12
Page 6
Cornell University
FORCAST
5um Flux Estimates vs. SNR
130
125
120
Relative Flux
115
110
105
100
95
90
1.0
10.0
100.0
Signal-toNoise Ratio
Figure 8: Extracted flux vs. Signal-to-Noise ratio for all = 5 m trials. At high SNR the underestimate of the total flux is due to undersampling and the use of a gaussian PSF. Note that below
SNR ~ 5 there is a systematic overestimate of the flux that increases with decreasing SNR. This
offset however is much smaller than the individual flux errors.
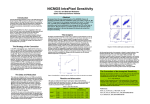
Simulation Results:
Trials were run with different amounts of guiding error corresponding ge = 0.2, 0.4, … 1.6 and 1.7” at 5,
10, 20 and 30m. Statistics were computed for all the relevant parameters, such as the average volume
(flux) of the gaussian fit and the standard deviation. The results are summarized in Figures 9-12.
Ignoring Bad Fits: Fits that failed were repeated with a new set of data. For very low SNR data this could
occur ~10% of the time. A clipping algorithm was applied to throw out bogus data resulting from a fit that
finished properly but still with very poor results. First the top and bottom 5% of the distribution were ignored to compute and average and standard deviation of a given run (consisting of 100 or 400 data points).
A 5- rejection criterion was applied to the entire sample and iterated 3 times. This technique was used to
avoid having outliers bias the initial estimate of the standard deviation. Typically this process rejected only
one or two points.
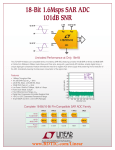
Number of Trials: 400 simulations were performed at each ge for = 5, 10, 20 and 30m. To study the
dependence on the number of trials both 100 and 400 simulations were run at = 5 and 10m. There was
very little difference in the results.
Recall that this is related to rms1D by ge = sqrt(2) rms1D. The gaussian noise model of TM-FOR99-11 is
plotted over the simulated data. This model has been modified slightly to include pixelation noise given by
pix = 0.22”. The agreement between the gaussian model and the simulation results is remarkably good.
TM-FOR99-12
Page 7
Cornell University
FORCAST
5-um Signal-to-Noise Ratio Change
2.5
SNR = 35
SNR = 12
2.3
SNR = 7.0
SNR = 5.4
2.1
SNR = 4.3
SNR = 3.8
Gaussian Model
Relative SNR
1.9
1.7
1.5
1.3
1.1
0.9
0.2
0.4
0.6
0.8
rms_1d (arcsec)
1.0
1.2
9 points averaged per symbol, 400 iteration per point
Figure 9: Signal-to-Noise ratio degradation vs. rms1D (long axis) guiding errors at 5m for FORCAST. At 1:2 axial ratio is assumed for the guiding error ellipses in x and y. The gaussian model
of TM-FOR99-11, modified to include pixelation effects is also plotted. The signal-to-noise is
gets progressively worse by the factor listed as rms1D increases.
10-um Signal-to-Noise Ratio Change
2.5
SNR = 30
SNR = 10
2.3
SNR = 6.2
SNR = 3.0
2.1
SNR = 3.8
SNR = 3.8
Gaussian Model
Relative SNR
1.9
1.7
1.5
1.3
1.1
0.9
0.2
0.4
0.6
0.8
rms_1d (arcsec)
1.0
1.2
9 points averaged per symbol, 400 iteration per point
Figure 10: Same as Figure 9 except for = 10m.
TM-FOR99-12
Page 8
Cornell University
FORCAST
20-um Signal-to-Noise Ratio Change
2.5
SNR = 21
SNR = 7.3
2.3
SNR = 4.6
SNR = 3.4
2.1
SNR = 2.0
SNR = 3.8
Gaussian Model
Relative SNR
1.9
1.7
1.5
1.3
1.1
0.9
0.2
0.4
0.6
0.8
rms_1d (arcsec)
1.0
1.2
6 points averaged per symbol, 400 iteration per point
Figure 11: Same as Figure 9 except for = 20m.
30-um Signal-to-Noise Ratio Change
2.5
SNR = 16
SNR = 5.6
2.3
SNR = 3.5
SNR = 2.5
2.1
SNR = 1.9
SNR = 1.5
Gaussian Model
Relative SNR
1.9
1.7
1.5
1.3
1.1
0.9
0.2
0.4
0.6
0.8
rms_1d (arcsec)
1.0
1.2
6 points averaged per symbol, 400 iteration per point
Figure 12: Same as Figure 9 except for = 30m.
TM-FOR99-12
Page 9
Cornell University
FORCAST
Supporting Files
File
Description
Forcast_PSF.mcd
Convolves diffraction pattern with guiding errors and optical quality errors (both
assumed gaussian) to get the PSF at a specified wavelength. The output is the
signal on a set of pixel with the source centered on six different fraction pixel positions, e.g. the offsets from the center in pixels are (0,0), (0,0.25), (0,0.5),
(0.25,0.25), (0.25,0.5), (0.5,0.5), (0.25,0), (0.5,0), and (0.5,0.25). A run is done
for each value (,ge) combination. Typical times for a single run are 20-30
minutes on a fast (400 MHz) PC.
Func_Fit.exe
Windows95/98 program that reads in Forcast_PSF.mcd output files, adds noise,
and performs a gaussian fit. Numerous iterations are run and the results statistically tabulated (in the “Work” window). These statistical results are copied to an
Excel spreadsheet for analysis.
PSF_Study.xls
Excel spreadsheet that tabulates and plots the Monte Carlo results from
Func_Fit.exe. It also compares simulation results to a gaussian analysis (ala TMFOR99-11).
Data\*.dat
MathCad output files in the form of P05_12_1.dat, P05_12_2.dat, … The first
number in the file name is the wavelength in microns. The next is 10*ge while
the last is a sequence number from 1...9 corresponding to the offsets from a pixel
center give above in the defiintion of "Forcast_PSF.mcd."
pstat_*.dat
Text versions of the output from Func_Fit.exe. This was read into Excel for sorting and plotting.
Revision History
Version
Date
Comments/Changes
1.0
07-Sep-99
First release
TM-FOR99-12
Page 10