Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Brownian motion wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Center of mass wikipedia , lookup
Modified Newtonian dynamics wikipedia , lookup
Jerk (physics) wikipedia , lookup
Classical mechanics wikipedia , lookup
Fictitious force wikipedia , lookup
Hunting oscillation wikipedia , lookup
Relativistic mechanics wikipedia , lookup
Work (thermodynamics) wikipedia , lookup
Thermodynamic system wikipedia , lookup
Equations of motion wikipedia , lookup
Centrifugal force wikipedia , lookup
Rigid body dynamics wikipedia , lookup
Seismometer wikipedia , lookup
Hooke's law wikipedia , lookup
Classical central-force problem wikipedia , lookup
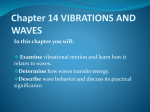
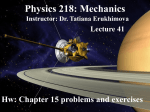
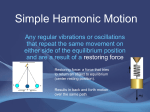
Unit 5, Part 1: Simple Harmonic Motion Notes (Springs and Pendulums) Everything in the universe jiggles (vibrates back and forth in a repeating motion)---from the atoms/subatomic particles in all matter up to the skyscrapers swaying in the wind. By definition, Harmonic Motion is any jiggling repeating motion. All things in harmonic motion can be described in terms of their frequency and period of vibration. Frequency (f) - The number of complete back and forth movements (cycles, oscillations) per second. The unit is the Hertz (Hz). Period (T) - The number of seconds per cycle (number of seconds per oscillation; the number of seconds per one complete back and forth cycle). The unit is the second (s). Period and frequency are inverses of each other: f 1 T and T 1 f The following items must be true for an object to be in simple harmonic motion (SHM): It’s instantaneous velocity is in a straight line. A variable force (which is a changing force, i.e., not a constant force) acts on it. The magnitude of force is proportional to the displacement of the mass (meaning, the force increases as the displacement of the object increases). The force acting on the object is always opposite in direction to the displacement direction (the force always tries to pull the object back toward an equilibrium position). The motion is repetitive and a round trip (back and forth) is always made in equal time periods. Friction is either negligible or nonexistent. There are two basic examples of simple harmonic motion: Springs and Pendulums. Springs A spring (horizontal or vertical) that oscillates an attached mass back and forth (or up and down for a vertically oriented spring) on a frictionless surface (or in the frictionless air for a vertical spring) is an example of an object in simple harmonic motion. The magnitude and direction of the force (F) in terms of its displacement (x) can be modeled by Hooke’s Law: Where: Fs is known as the spring force (N) = the spring constant (in N/m) = the displacement of the body from its equilibrium (x = 0m) position (at equilibrium, = 0m so Fs= 0N ) The spring constant (k) is an indication of the spring's stiffness. A large value for k indicates that the spring is stiff. A low value for k means the spring is soft and flexible. In general, springs with large k values can apply larger forces on objects than springs with low k values (for a common displacement). In addition, the number of coils in a spring is also related to the spring constant. Springs with a lot of coils have lower k’s and springs with fewer coils have higher k’s (they are inversely proportional). Super Important: By looking at Hooke’s Law you should be able to tell that the Fα x. This means that the F is not constant; its value fluctuates with the displacement (x) of the object attached to the spring. At larger displacements the force is greater. However, as the object moves toward equilibrium (x = 0m), the force decreases, going to 0N at equilibrium. Because the force is not constant, the acceleration of the mass attached to the spring is not constant and you can not use the kinematic equations to describe their motion; you will need to solve these problems in terms of conservation of energy. Unit 5, Part 1 Simple Harmonic Motion Notes 1 The right side of the Hooke’s Law equation is negative because the force (due to the spring) on the attached object always acts opposite to the displacement of the object attached to the spring. Because this force always acts opposite to the motion, it will always pull the object toward the equilibrium/resting position and is, therefore, sometimes referred to as the restoring force. This is illustrated in the figures below. No force is acting on the mass when the spring is at equilibrium. If you pulled the mass to the right and then released it (Figure 1a), the spring will apply a leftward force on the object to pull it back to the left. This leftward F on the object will give it a leftward acceleration. This leftward acceleration will make the object slow down as it moves to the right (and is to the right of equilibrium) and the object will eventually have an instantaneous speed of zero at it maximum displacement. However, the leftward force and acceleration still act on the object so it will begin to move to the left and speed up as it does so. Once the object is moving to the left, it has inertia (and momentum) and will continue to move past (beyond) equilibrium, giving the attached mass a displacement to the left of equilibrium (Figure 1b). At the moment the object moves beyond and to the left of equilibrium, the spring begins to pull to the right, applying a rightward force and acceleration to the object on the end of the spring. This will cause the object attached to the spring to eventually slow down as it moves left (and to the left of equilibrium), momentarily stop (at its maximum displacement), and then speed up to the right (but still to the left of equilibrium). Again, the object attached to the spring will have inertia and will again coast beyond equilibrium to the right of the equilibrium point. At this point, the spring will apply a leftward force and acceleration on the object, causing it to slow down as it moves to the right, eventually bringing the object to a moment of rest (at the maximum displacement), and then forcing the object to speed up as it moves back to the left. Once it passes the original position (equilibrium), a leftward force acts on the object, causing it to slow it down and repeat the entire cycle again and again in a certain period of time. This back and forth motion is called “simple harmonic motion” and it will continue forever as long as there is no friction present. Figure 1a.When the displacement is to the right the spring force is directed to the left. Figure 1b.When the displacement is to the left the spring force is directed to the right. Figure 1c. In both cases shown in Figures 1a and 1b, the effect of the spring force is to return the system to the equilibrium position. At this position, = 0 and the spring is un-stretched, signifying = 0. However, if there is no friction, the object will continue to oscillate back and forth forever and ever and ever. Please make sure you note that the size of the force in the spring acting on the attached object changes with the object’s displacement from equilibrium. The further away the object is from equilibrium, the greater the force (and, hence, the greater the acceleration) acting on it becomes. It is NOT a constant force---it is a variable force and won’t produce constant accelerations. So, for spring problems, you can’t always use the four funky equations to “determine how fast the spring is moving at any certain point” (for example)….you will have to use conservation of energy instead. But, the F s is just another force that makes up the net force acting on any given object. And, you might have to use the net force to determine “instantaneous” things about the object vibrating on the end of the spring. However, I am hoping that you determined (from above) that the object at the end of the spring is the slowest (zero velocity, zero KE, zero momentum) at the ends of the motion (maximum displacement) and it is moving the fastest (with a max KE, velocity, and momentum) when it passes through equilibrium. And…one more thing….In simple harmonic motion, Amplitude (A) is a term commonly used to describe the maximum displacement from equilibrium that the mass has when undergoing simple harmonic motion. If a mass has a maximum displacement from equilibrium of 0.2m, that means that the actual amplitude of the object undergoing SHM is A= +0.2m to A = -0.2 m. Unit 5, Part 1 Simple Harmonic Motion Notes 2 Vertically Oriented Springs When a mass, , is suspended vertically from a vertically oriented spring, the spring will stretch. If you allow the spring to just stretch (not oscillate) and the system is allowed to reach equilibrium (as shown in Figure 2 below), the net force acting on the object must be zero so the magnitude of the upward spring force (Fs) will equal the weight (mg) of the object. Using this information you can determine the amount of initial stretching ( x0) by the spring to reach equilibrium by the following equalities: Fs = kx and in equilibrium kx = mg x0 = mg/k Where: x0 equals the amount of initial stretching to equilibrium (its resting position, where Fnet = 0N) This is the “equilibrium” point that the spring will oscillate about (with a certain amplitude, A, above and below equilibrium) when a mass is hung from it and set into simple harmonic motion. When you do problems with vertically oriented springs you will have to first find the equilibrium point of the system and that is x0 Also, if you know the mass hanging from a spring in equilibrium and you know the initial amount of stretching (x0), you can also determine the spring constant, k, of the spring. Figure 2 (above). A body of mass, , is suspended from a spring having a spring constant, . If the system is in equilibrium the spring force is balanced by the weight of the body. Summary: If a mass is hanging from a spring and then pulled down to some arbitrary displacement (-x, to give it some -A) from its equilibrium point and then released, the mass will oscillate (boing up and down) about its equilibrium point from –A to +A. The object will move up and down in the case of a vertically oriented spring between the positions x = +A and x = -A. When the mass travels from the maximum displacement x = +A to the minimum displacement x = -A and then back to the position x = +A, we say that the mass has moved through one “cycle” of motion, or oscillation. When doing spring problems, you will often need to find the Period of the motion of the object attached to the spring. The period (T, the time in seconds of one complete cycle of motion ) of one full cycle can be calculated with the following equation: The above equation states that the larger the mass on any given spring, the greater the Period (i.e., the longer it takes for one complete back and forth cycle). Notice the period is only dependent upon the mass of the oscillating body and the spring constant, . As the stiffness of the spring increases (as k increases), the period decreases (it takes less time to complete one cycle) so the object on the spring moves faster (which increases the body's average velocity and KE) as it passes through equilibrium. Conversely, an increase in the body's mass means the period increases, thereby requiring more time for the body to move through one oscillation (which decreases the speed and KE of the object as it passes through equilibrium). Important: The period of motion is independent of the amplitude (displacement)of the oscillations. No matter how far you stretch or compress the spring, the period will remain the same (it ONLY depends on mass and the spring constant, k). The amplitude is whatever distance you pull the spring to in order to give it that displacement. For any two identical masses oscillating on two separate but identical springs, each mass will have the same period as the other, regardless of their amplitudes. Also note that the period is completely independent of g. So, if you set an object of mass m hanging vertically from a spring of spring constant k into SHM on earth and repeat the set up on the moon, the period will be identical in both situations. Each of the vertical springs will have a different equilibrium point around which the spring will boing up and down (the X 0 will be greater on the earth than the moon since the object’s weight is larger on the earth than the moon), but each object will boing at the same rate/period/frequency. Unit 5, Part 1 Simple Harmonic Motion Notes 3 Okay, so by now you know that the motion of an object in SHM is periodic, meaning the displacement, velocity and acceleration all vary sinusoidally. Looking at the diagram below, an object vibrating is SHM can be represented by a sin wave. Stuff in General about springs…. When a mass is attached to a spring and set into SHM, the force (due to the spring) is continually changing in magnitude. At the equilibrium point, the force is zero (as the spring isn’t stretched) and so must be the acceleration (due to F net = ma). However, the object is moving through equilibrium simply due to its inertia (and momentum). Coincidentally, the object moves the fastest as it passes through equilibrium. However, once the object passes through equilibrium, the spring starts to stretch again and apply a force on the object. This force causes the object to accelerate and slow down. As the object gets further from equilibrium, the force acting on it becomes greater and greater and so does the acceleration so the object slows down even faster. Both the force and the acceleration acting on the object are the greatest at the maximum displacement/amplitude but at this point the speed is momentarily zero. Previously I mentioned that the number of coils in a spring is inversely proportional to its spring constant. Springs with a lot of coils have lower spring constants than springs with fewer coils. They truly are inversely proportional. For example, let’s say you have a spring with 50 coils and its spring constant is 100 N/m. If you cut the spring in ½ (so you now have two 25-coil sections), each of those coils now has a spring constant of 200 N/m. If you had cut it into thirds instead, each of the three sections would have a new spring constant of 300 N/m. Work, Energy, and Momentum in Springs Since springs have forces in them, they can be used to do useful work on objects. For example, there are springs in doors that will cause an open door to be pulled closed if it is opened (by applying a Torque to it). Springs also can have energy. If they are stretched or compressed, they have a type of potential energy that is called Elastic Potential Energy (just like some objects have Gravitational Potential Energy if they are above some reference point). The formula for the Elastic Potential Energy in a spring is PEs = ½ kx2 Where PEs = Elastic Potential Energy (the energy in a spring or rubber band); this energy can be transferred to an object k = the spring constant of the spring x = the displacement of the object on the spring from equilibrium Any object attached to the end of a spring can have multiple types of energy simultaneously: gravitational PE, elastic PE (due to the spring acting on it), and KE. The elastic PE is just another type of energy that is conserved. So….if Wnc = OJ and Ei = Ef then, KEi + PE(grav)i + PE(elas)i = KEf + PE(grav)f + PE(elas)f If a spring is oscillating horizontally, the gravitational PE can be ignored as it is constant throughout the object’s motion. However, if the object is oscillating vertically, its gravitational PE is changing along with all the other types of energy. So, Unit 5, Part 1 Simple Harmonic Motion Notes 4 technically you should have to use all three forms of energy in each conservation of energy problem dealing with vertically oscillating springs. However (lucky for all involved), if you set the spring’s equilibrium point as where the object will have zero elastic PE, then you can just ignore the gravitational PE throughout the whole conservation of energy process/calculations. If you don’t choose to do this, you will need to realize that the actual elastic PE of the object is not actually zero at the equilibrium point (since the spring has some initial stretching due to the mass hanging from it). That little bit of elastic PE will be present at the equilibrium point, but will also need to be accounted for when the spring is stretched to its maximum amplitudes. The major point you need to get from this whole paragraph is to make conservation of energy problems in springs easy to solve, just set the equilibrium point as the point where the spring has zero elastic potential energy (even though in reality it has a little) and ignore the gravitational PE throughout the whole problem. The equilibrium point is the point where the object attached to the spring has the greatest amount of KE as it oscillates on the end of the spring (since it is moving the fastest through equilibrium). So, for BOTH vertical and horizontal conservation of energy problems, the only equation that usually (not always) will be needed to solve the problems smooshes down to the following: KEi + PE(elas)i = KEf + PE(elas)f Where: PEs = ½ k (Δx2) units N/m x m2 N m J KE = ½ mv2 When a spring stretches or compresses and no loss of system energy occurs (i.e., no non-conservative forces are acting on it) energy is simply transferred from KE to elastic PE and back.. From a previous unit you should know that If ∆E = OJ Wconservative forces = ΔKE= -ΔPE= F(avg) d Where Wconservative forces is the work done by conservative forces (such as gravity or the force in a spring) In order for a spring to compress (or stretch) in SHM, the spring’s elastic potential energy would have to change by ½ k (Δx2) and that would be numerically equal to the amount of work the conservative force of the spring could do on another object (like a block of wood attached to the end of the spring, for example). Also, if an object is moving (with some momentum) and it hits a spring and compresses the spring by x meters before the object comes to a stop, the object’s change in KE would equal the change in the spring’s PE and that would equal the amount of work the object did on the spring to compress it by Δx (while the object was also undergoing an certain change-in momentum). And….the velocity change of the object would lead to the object’s change in momentum and its change in KE. But, please remember that the “force” applied on the object to make the object’s KE and momentum change is NOT a constant force….the size of the force changes with the degree of stretched-ness of the spring. The force when the spring is un-stretched is 0N and the maximum force is when the spring is at its largest amplitude (either stretched or compressed). If you ever want to use the force of a spring in any equation other than Fs= kx, (such as Fnet= ma or W = Fd) you would have to use the average force of the spring [which is (Fi + Ff)/2]. This is SUPER important! So, if a moving object hits a spring and forces it to compress by x meters in order to stop, the object would have a negative change in momentum and a negative change in KE while doing non-conservative work on the spring. The work done on the spring would be equal to the object’s decrease KE and this would also be equal to the increase in the spring’s elastic PE. The spring’s change in elastic PE would be equal, but opposite, to the object’s change in KE and the amount of work done on it. And, the reverse of everything is true as well (in order to make an object move, the spring would need to do work on the object etc…..). Please keep the ideas of momentum, work, and energy in mind as you approach this unit. Unit 5, Part 1 Simple Harmonic Motion Notes 5 Pendulums The motion of a pendulum can be considered simple harmonic motion even though the bob hanging at the end of the string moves in a curve (remember, in order for an object to be in SHM it must be moving in a straight line). This is because if the string is relatively long compared to the initial displacement, the curve made by the bob is close enough to a straight line. The pendulum works almost like the spring. The force is always pointing opposite the displacement. The bob is moving the fastest when it passes through its lowest point (position 2 on the illustration at the left). The pendulum continuously moves back and forth. Also, the equation for the period of a pendulum is similar to that of the spring: where L is the length of the string and g is the magnitude of the gravitational acceleration. Note that the period does not depend at all on the mass or the initial displacement/amplitude of the object attached to the end of the string. The restoring force for a pendulum is simply the force of gravity that is parallel to the object’s velocity at any given instant. The force of gravity always wants to pull the object back toward equilibrium but the object’s inertia keeps it moving through equilibrium just like in springs. The further the object is from equilibrium, the greater the amount of force (weight parallel to the velocity) pulling on the object (i.e., the greater the restoring force)...just like in springs. The figure to the right shows the velocity and acceleration changes for the motion of a pendulum. The object has the greatest velocity and KE as it passes through the bottom of the arc (at this point the restoring force/amount of the object’s weight parallel to its velocity is zero). It has zero velocity and zero KE but the greatest PEg as it reaches its maximum displacement. Its total energy must remain constant so as its KE decreases its PEg will increase by the same amount. Here are some questions and answers that I pulled from some website (but I thought they were good): Q. If the value of acceleration due to gravity 'g' on a planet is 3 times its value on the surface of the earth then what should be the change in length of the pendulum so that its time period remains constant? Ans. From the Period of a pendulum equation we get that length should be made three times so that the time period remains constant. Q. Is the motion of simple pendulum uniform? Ans. No, since a restoring force acts on the pendulum bob the motion is non-uniform (it will continually speed up and slow down). Q. Will a simple pendulum oscillate at the center of the earth? Ans. No, since g = 0 at the center of the earth, the time of the period becomes infinite---the pendulum does not oscillate. Q. What conditions must be fulfilled so that a body may vibrate continuously and show periodic motion? Ans. (i) There must be an elastic (changing) restoring force to accelerate the body towards its mean/equilibrium position. (ii) The body must have inertia to keep itself moving beyond its mean/equilibrium position. (iii) The friction opposing the motion must be negligible. Unit 5, Part 1 Simple Harmonic Motion Notes 6