Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Hooke's law wikipedia , lookup
Classical mechanics wikipedia , lookup
Atomic theory wikipedia , lookup
Hunting oscillation wikipedia , lookup
Brownian motion wikipedia , lookup
Matter wave wikipedia , lookup
Rigid body dynamics wikipedia , lookup
Newton's theorem of revolving orbits wikipedia , lookup
Electromagnetic mass wikipedia , lookup
Work (physics) wikipedia , lookup
Relativistic mechanics wikipedia , lookup
Mass versus weight wikipedia , lookup
Center of mass wikipedia , lookup
Equations of motion wikipedia , lookup
Centripetal force wikipedia , lookup
Newton's laws of motion wikipedia , lookup
Seismometer wikipedia , lookup
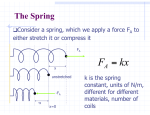
Physics II Homework III CJ Chapter 14; 6, 16, 20, 23, 34, 44, 51, 76 14.6. Model: The oscillation is the result of simple harmonic motion. Visualize: Please refer to Figure Ex14.6. Solve: (a) The amplitude A 20 cm. (b) The period T 4.0 s, thus f 1 1 0.25 Hz T 4.0 s (c) The position of an object undergoing simple harmonic motion is x t A cos t 0 . At t 0 s, x0 10 cm. Thus, 10 cm 20 cm cos0 0 cos1 20 cm cos1 2 10 cm 1 2 rad 120 3 Because the object is moving to the right at t 0 s, it is in the lower half of the circular motion diagram and thus must have a phase constant between and 2 radians. Therefore, 0 23 rad 120 . 14.16. Model: The mass attached to the spring is in simple harmonic motion. Solve: (a) The period is T 2 m 2 k 0.507 kg 20 N m 1.00 s (b) The angular frequency is 2 T 2 1.0 s 2 rad s. (c) To calculate the phase constant 0 , x0 A cos0 0.05 m 0.10 m cos0 0 cos1 21 13 rad Because the mass is moving to the right at t 0 s, it is in the lower half of the circular motion diagram. Hence, 0 13 rad. (d) At t 0 s, vx t 0.10 m 2 rad s sin 2 t 0 becomes 0.10 m 2 rad s sin 13 rad 0.544 m s (e) The maximum speed vmax A 2 rad s 0.10 m 0.628 m s . (g) At t 1.3 s, x1.3 s 0.10 m cos 2 1.3 s 13 rad 0.0669 m . (h) At t 1.3 s, v1.3 sx 0.10 m 2 rad s sin 2 rad s1.3 s 13 rad 0.467 m s . 14.20. Model: The vertical oscillations constitute simple harmonic motion. Solve: To find the oscillation frequency using 2 f k m , we first need to find the spring constant k. In equilibrium, the weight mg of the block and the spring force kL are equal and opposite. That is, mg kL k mg L . The frequency of oscillation f is thus given as f 1 2 k 1 m 2 mg L 1 m 2 g 1 L 2 9.8 m s2 3.52 Hz 0.020 m 14.23. Model: Assume the small-angle approximation so there is simple harmonic motion. Solve: The period is T 12.0 s 10 oscillations 1.20 s and is given by the formula 2 T 2 2 L T 1.20 s 2 L g 2 9.8 m s 35.7 cm g 2 14.34. Visualize: Please refer to Figure P14.34. Solve: The position and the velocity of a particle in simple harmonic motion are x t A cost 0 and vx t A sin t 0 vmax sin t 0 From the graph, T 12 s and the angular frequency is 2 2 rad s T 12 s 6 (a) Because vmax A 60 cm s , we have A 60 cm s 60 cm s 6 rad s 114.6 cm (b) At t 0 s, v0x A sin0 30 cm 60 cm s sin 0 30 cm 0 sin 1 0.5 rad 61 rad 30 or 65 rad 150 Because the velocity at t 0 s is negative and the particle is slowing down, the particle is in the second quadrant of the circular motion diagram. Thus 0 65 rad. (c) At t 0 s, x0 114.6 cm cos 65 rad 99.2 cm . 14.44. Solve: (a) The velocity is –0.25 m/s at times that satisfy the equation 0.25 m/s (0.35 m/s) sin(20t ) sin(20t ) 0.25 m/s 0.7143 0.35 m/s The time is 20t rad sin1 (0.7143) 0.7956 rad t 0.7956 rad rad 0.117 s 20 rad/s This is a time at which v –0.25 m/s, but it’s not a time after t 0 s. But the sine function is periodic with period 2 rad, so another angle whose sine is 0.7143 is 20t rad sin1 (0.7143) 0.7956 rad 2 rad t 0.7956 rad rad 0.197 s 20 rad/s This is a time t > 0 s at which v –0.25 m/s. (b) The amplitude is A vmax/ (0.35 m/s)(20 rad/s) 0.0175 m 1.75 cm. Thus the position at t 0.197 s is x A cos( t 0 ) (1.75 cm)cos((20 rad/s)(0/197 s) rad) 1.22 cm 14.51. Model: The compact car is in simple harmonic motion. Solve: (a) The mass on each spring is 1200 kg 4 300 kg . The spring constant can be calculated as follows: 2 2 k k m 2 m 2 f 300 kg 2 2.0 Hz 4.74 104 N m m (b) The car carrying four persons means that each spring has, on the average, an additional mass of 70 kg. That is, m 300 kg 70 kg 370 kg . Thus, 2 f 1 2 2 k 1 m 2 4.74 104 N m 1.80 Hz 370 kg Assess: A small frequency change from the additional mass is reasonable because frequency is inversely proportional to the square root of the mass. 14.76. Model: The two springs obey Hooke’s law. Assume massless springs. Visualize: Each spring is shown separately. Note that x x1 x2. Solve: Only spring 2 touches the mass, so the net force on the mass is Fm F2 on m. Newton’s third law tells us that F2 on m Fm on 2 and that F2 on 1 F1 on 2. From Fnet ma, the net force on a massless spring is zero. Thus Fw on 1 F2 on 1 k1x1 and Fm on 2 F1 on 2 k2x2. Combining these pieces of information, Fm k1x1 k2x2 The net displacement of the mass is x x1 x2, so x x1 x2 Fm Fm 1 k k2 1 Fm 1 Fm k1 k2 k1 k2 k1k2 Turning this around, the net force on the mass is kk kk Fm 1 2 x keff x where keff 1 2 k1 k2 k1 k2 keff, the proportionality constant between the force on the mass and the mass’s displacement, is the effective spring constant. Thus the mass’s angular frequency of oscillation is keff m 1 k1k2 m k1 k2 Using 12 k1 / m and 22 k2 / m for the angular frequencies of either spring acting alone on m, we have (k1 / m) (k2 /m) 1222 (k1 /m) (k2 / m) 12 22 Since the actual frequency f is simply a multiple of , this same relationship holds for f: f f 12 f 22 f f 22 2 1