Survey
* Your assessment is very important for improving the work of artificial intelligence, which forms the content of this project
Electronic engineering wikipedia , lookup
Audio power wikipedia , lookup
PID controller wikipedia , lookup
Voltage optimisation wikipedia , lookup
Current source wikipedia , lookup
Electrification wikipedia , lookup
Power inverter wikipedia , lookup
Electric power system wikipedia , lookup
Mercury-arc valve wikipedia , lookup
Three-phase electric power wikipedia , lookup
History of electric power transmission wikipedia , lookup
Power engineering wikipedia , lookup
Analog-to-digital converter wikipedia , lookup
Electrical substation wikipedia , lookup
Resilient control systems wikipedia , lookup
Mains electricity wikipedia , lookup
Variable-frequency drive wikipedia , lookup
Distributed control system wikipedia , lookup
Control theory wikipedia , lookup
Pulse-width modulation wikipedia , lookup
Alternating current wikipedia , lookup
Opto-isolator wikipedia , lookup
Control system wikipedia , lookup
Switched-mode power supply wikipedia , lookup
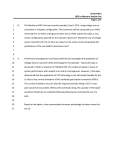
AN ALTERNATIVE CONFIGURATION FOR DIGITALLY CONTROLLED PARALLEL CONNECTED DC–DC POWER CONVERTERS Siew-Chong Tan, Y.M. Lai, and Kevin Y.C. Wong Department of Electronic & Information Engineering Hong Kong Polytechnic University, Hung Hom, Hong Kong [email protected] ABSTRACT This paper proposes an alternate configuration for digitally controlled parallel connected DC–DC power converters. Unlike conventional scheme which uses only one digital controller to control all of the n parallel connected power converters, the proposed scheme employs n digital controllers for n paralleled power converters. This arrangement prevents single controller breakdown from faulting the whole converter system, and therefore the reliability of the entire system is significantly improved. Furthermore, the configuration also fixates the computation resources allocated to each converter, regardless of the number of converter units employed. Experimental results suggested that the digitally controlled power converters function sufficiently in regulating the current distribution level under this configuration. Keywords: Power converters, parallel connected, digital control, active current sharing. 1. INTRODUCTION With the advent of modern digital signal processors (DSP), the design of control for power electronics by digital technology has significantly changed. Older types of digital controllers cannot replace conventional analog counterparts because of the difficulty of programming and debugging in low level languages; slow processing speed; and high cost, is no longer valid. The advances of computer technology which generates the production of ample types of low cost and high speed DSP that can be programmed in various high level programming environments (like Visual C++, Code Composer etc.), have provided us the window to reconsider the options of using digital controller in power electronics. One such consideration is in the control of DC–DC power converters. Literature review showed that earlier works on digitally controlled DC–DC power converter [1]–[3] were targeted at high-end applications mainly for satellite or space systems. However, this is anachronistic. Today, there are many digital controlled standalone power supplies commercially available. This is attributed to their advantages of being more flexible, noise robust, and reliable than analog controllers. In comparison, the advantages of using digital controllers on parallel connected converters system over single standalone converter units are more obvious: 1) Provision for interleaving: digital controller can implement interleaving in paralleled converters more easily than analog controller [3]; 2) Allow easy implementation of different current programming schemes, control structures, and complicated control laws, through software codings and revisions. However, contradictorily, little attention has been given to the research or development of digitally controlled parallel connected DC–DC power converters. In fact, the authors have found only few works [3], [4], reporting in their attempts to run digitally controlled DC–DC power converters in parallel. Even so, the controller used is a centralized digital controller which is externally connected to control concurrently all converters in parallel, as shown in Fig. 1. Although economical (only one controller is used for all of the n paralleled converters), this configuration has low reliability: since the failure of the controller may easily lead to the failure the entire converter system. In addition, with n paralleled converters sharing the limited computational resources of a single digital controller, the performance of the system will deteriorate as n gets larger. This deterioration is even more obvious for the digital controllers that are running computationally exhaustive control programs. Hence, in this paper, we propose an alternative configuration for digitally controlled parallel connected converters. Following the philosophy of distributed computing, we use n sets of DSP to control n power converters in parallel. This forms a decentralized system, whereby each power converters is controlled by an individual DSP, as illustrated in Fig. 2. By obtaining information from peer converters through the control bus, each controller works in solo to Control signals External Digital Controller Feedback signals Power Converter #1 V DC Power Converter #2 LOAD Power Converter #n Figure 1: Parallel-connected power converters with centralized external digital controller. Power Converter #1 with DSP DSP Control bus V DC Power Converter #2 with DSP DSP droops schemes for their superiority in achieving near uniform current distribution [6], [7]. Hence our work and discussion will be based on the active current sharing schemes. 2.1. Control Structures There are two types of controller employed in active current sharing schemes: internal controller and external controller. External controller configuration was previously shown in Fig. 1, with the exception that in conventional schemes, analog controller is employed instead. For internal controller, there are two basic control structures, namely innerloop regulation and outer-loop regulation [5]. These structures varies in the way their current sharing loops are arranged. Since each has its merits and limitations, the choice of the control structure is therefore dependent upon the required applications. LOAD 2.2. Current-programming Schemes Power Converter #n with DSP DSP regulate its own power output, ensuring even current distribution among different converters. This is analogous to conventional paralleled converters with the distributed analog controllers setup [5]. The main advantages of this configuration over the external controller configuration in Fig. 1, are that computation power and resources allocated to control each converter is maintained regardless of the number of converters in parallel, and that the reliability of the system is preserved since no single controller/converter failure can bring down the entire system. The tradeoff of this arrangement is nevertheless the higher cost of the implementation, constituted by the n sets of DSP. There are three main types of current-programming schemes: Average current sharing (ACS), Dedicated Master/Slave current sharing (DMSCS), and Automatic Master/Slave current sharing (AMSCS) control schemes. ACS control scheme is the method of current sharing whereby the reference current sharing signal, in which each converter tracks to achieve uniform current distribution, is the weighted average of all output converter current signals. For DMSCS scheme, the output current of a specific converter module is chosen as the reference signal. For AMSCS scheme, the highest (or lowest) output current signal of the converters at any particular time, is automatically selected as the reference current signal. Hence, like AVCS, both DMSCS and AMSCS control schemes perform their current sharing control by having all their individual converters tracking the reference signal. Similarly, the choice of the schemes is dependent upon their individual merits and limitations, and the required application. 2. BRIEF REVIEW OF CONVENTIONAL ANALOG PARALLELING SCHEMES 3. PROPOSED DIGITALLY CONTROLLED PARALLEL-CONNECTED POWER CONVERTERS Paralleling of power converters inherits the problem of uneven current distribution, which results in higher thermal stress on specific converters, thereby reducing the system’s reliability, and also resulting in an overall under-utilized system. Numerous control schemes aiming to solve this problem had been proposed. According to [5], they can be classified into two categories: the droops schemes [6], and the active current sharing schemes [7]. Among these, the active current sharing control schemes, which individually comprises a combination of a specific control structure and a current-programming scheme, are preferred over the A two cells parallel connected buck converters using the TMS320LF2407A DSP chips as the controllers, under the outer-loop regulation control structure was constructed. The system was tested and analyzed using the ACS scheme. Figure 2: Parallel-connected power converters with distributed digital controllers in each power converter. 3.1. Experimental Setup Fig. 3 shows the schematic diagram of a single unit of the converter system. The complete experimental setup is shown in Fig. 4. The specifications of the buck converters used in this prototype are shown in Table 1. The total external loading for the paralleled converters, RLOAD , is between 2.5 Ω to 20 Ω. 10k 10k MUR460 22 10k 500 H +VO of other converters 12k VIN 3.3nF 30V MUR460 k 1N4001 + 1: 1 470 F + L O A D VO 1.37k 22 GND DSP - TMS320LF2407A Microprocessor + IO1 0.27 12 H 1N965B 220 F 1N4728A 10k 12 H IRF620 220 F 137 + - 3.3nF -VO of other converters VO Analog to Digital Converter i L1 (SENSE) i L2 (SENSE) i Ln (SENSE) 1N4001 TLP250 Gate Driver PWM Memory Figure 3: Schematic diagram of one buck converter unit. 3.2. Active Current Sharing Scheme Fig. 5 shows the control mechanism of the active sharing control scheme employed in the experiment. This control mechanism has an average current sharing control component to perform current distribution control, and an innerloop PI average current mode control component to perform the voltage regulation of the individual converter. The control equation can be expressed as ¶ · µ ¸ ki1 Vcn = (Iref − Ion + Vref − βVon ) kp1 + − ILn (1) s ¶ µ ki2 , × kp2 + s L2 where Iref = IL1 +I and Ion = LPF (ILn ). Here, ILn 2 is the measured inductor current; Ion is the low frequency component of ILn ; Vref is the reference voltage; and βVon is the measured output voltage; kp1 and kp2 are the proportional gain constants; ki1 and ki2 are the integral gain constants; and n = 1 or 2 is the converter unit number. Hence, by computing for the control signal Vcn and then performing the comparator operation using the internal ramp signal Vramp , a driving signal u to control the converter unit is generated. 3.3. Advantages over Analog Counterparts 1) Complex control idea which is sometimes difficult to implement with analog hardware components is easily implementable in software. Figure 4: Proposed parallel connected converters. 2) Soft starting, slope compensation, interleaving, and fault protection can also be easily implemented in software codes. Table 1: Specifications of Buck Converter 3) Changing of control methodology for different field applications requires only software revision, and does not require hardware modification. Description Input voltage Switching frequency Load resistance Output voltage Reference voltage Parameter VIN fS RL Vo Vref Nominal Value 30 V 100 kHz 5Ω 10 V 3.3 V L1 1 2 ref L2 LPF o1 Vramp PWM VREF Vo u VC PI PI Figure 5: Function block of the control scheme. 4. EXPERIMENTAL RESULTS AND DISCUSSIONS Figure 6(a) shows the inductor current waveforms of the parallel connected converters operating without the current sharing component in the control mechanism, during startup. The electronic load is set at 2 A. It can be observed that current distribution is uneven with one converter dominating and supporting the entire current load. Fig. 6(b) show the inductor current waveforms of the parallel connected converters operating with the average current sharing component in the control mechanism, during startup. The electronic load is set at 2 A. With the ACS control scheme incorporated, the power converters reached even current distribution at around 0.072 s. undershoot during is about 1.05 V. Figure 7(b) shows the responses at step load change from 2.8 A to 2 A. The setting time is around 3.5 ms. The output voltage overshoot is about 1.00 V. OutputCurrent 05 . AD /V I Converter #1 5. CONCLUSION Converter #2 (b) With ACS control An alternative configuration for digitally controlled parallel connected DC–DC power converters is proposed in this paper. The main advantages of this configuration are that computation resources are not affected by the number of converters in parallel, and that the reliability of the system is significantly improved in comparison with the previous configuration. To proof the feasibility of the configuration, a two cells parallel connected buck converters using the T M S320LF 2407A DSP chips, is constructed. The system was then tested and analyzed with the ACS control scheme. The experimental results showed that the DSPs functioned sufficiently in regulating the parallel connected power converters under the proposed configuration. Figure 6: Startup inductor currents. 6. REFERENCES (a) No current sharing control OutputVotlage 2V/DIV Output Voltage OutputCurrent 05 . AD /V I Converter #1 Converter #2 OutputCurrent 0.5AD /V I Converter #1 Converter #2 OutputVotlage 0.5VD /V I Output Voltage 1.05 V (a) 2 A to 2.8 A OutputCurrent 05 . AD /V I Converter #1 Converter #2 Output Voltage OutputVoltage 0.5VD /V I 1V (b) 2.8 A to 2 A Figure 7: Dynamic response of paralleled converters (with ACS control) during step load changes. Figure 7(a) shows the responses of the output voltage and inductor currents (at different ground levels) of individual converter modules with respect to load change from 2 A to 2.8 A. The time for the converters to settle to near-even current distribution is around 3.5 ms. The output voltage [1] T.W. Martin and S.S. Ang, “Digital control for switching converters,” in Proceedings of the IEEE International Symposium on Industrial Electronics (ISIE), vol. 2, pp. 480–484, July 1995. [2] A. Prodic, D. Maksimovic, and R.W. Erickson, “Design and implementation of a digital pwm controller for a highfrequency switching dc-dc power converter,” in Proceedings, IEEE Conference on Industrial Electronics, Control and Instrumentations (IECON), vol. 2, pp. 893–898, 2001. [3] R.M. Button, P.E. Kascak, and R. Lebron-Velilla, “Digital control technologies for modular dc-dc converters,” in Proceedings of IEEE Aerospace Conference Proceedings, vol. 5, pp. 355–362, 2000. [4] J.A. Abu-Qahouq, N. Pongratananukul, I. Batarseh, and T. Kasparis, “Multiphase voltage-mode hysteretic controlled VRM with DSP control and novel current sharing,” in Proceedings, IEEE Applied Power Electronics Conference and Exposition (APEC), vol. 2, pp. 663–669, Mar 2002. [5] S.G Luo, Z.H. Ye, R.L. Lin, and F.C Lee, “A classification and evaluation of paralleling methods for power supply modules,” in IEEE Power Electronics Specialists Conference Record (PESC), vol. 2, pp. 901–908, 1999. [6] I. Bataseh, K. Siri, and H. Lee, “Investigation of the output droop characteristics of parallel-connected dc-dc converters,” in IEEE Power Electronics Specialists Conference Record (PESC), vol. 2, pp. 1342–1351, Jun 1994. [7] Siri K., Lee C.Q., and Wu T.F., “Current distribution control for parallel connected converters: part i,” in IEEE Transactions on Aerospace and Electronics Systems, vol. 28, No. 3, pp. 829–840, July 1992.